【动态规划法】求解TSP问题
问题详情
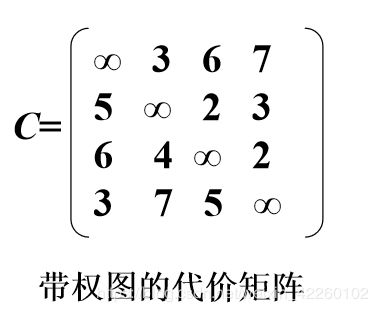
求解下图所示的TSP问题,计算出所经过的城市编号以及最短路径值,城市代价矩阵如图所示:
求解思路
假设从顶点i出发,令d(i, V’ )表示从顶点i出发经过V’ 中各个顶点一次且仅一次,最后回到出发点(i)的最短路径长度,开始时, V’ =V-{i},于是,TSP问题的动态规划函数为:
d(i, V’ )=min{cik+d(k, V’ -{k})} (k∈V’)
d(k,{})=cki (k≠i) (从k出发到达i的距离)
计算过程
从0城市出发经城市1、2、3然后回到0城市的最短路径长度是:
d(0,{1, 2, 3})=min{c01+d(1, { 2, 3}), c02+d(2, {1, 3}), c03+d(3, {1, 2})}
这是最后一个阶段的决策,而:
d(1, {2, 3})=min{c12+d(2, {3}), c13+ d(3, {2})}
d(2, {1, 3})=min{c21+d(1, {3}), c23+ d(3, {1})}
d(3, {1, 2})=min{c31+d(1, {2}), c32+ d(2, {1})}
这一阶段的决策又依赖于下面的计算结果:
d(1, {2})= c12+d(2, {}) d(2, {3})=c23+d(3, {})
d(3, {2})= c32+d(2, {}) d(1, {3})= c13+d(3, {})
d(2, {1})=c21+d(1, {}) d(3, {1})=c31+d(1, {})
而下式可以直接获得(括号中是该决策引起的状态转移):
d(1, {})=c10=5(1→0) d(2, {})=c20=6(2→0) d(3, {})=c30=3(3→0)
再向前倒推,有:
d(1, {2})= c12+d(2, {})=2+6=8(1→2) d(1, {3})= c13+d(3, {})=3+3=6(1→3)
d(2, {3})= c23+d(3, {})=2+3=5(2→3) d(2, {1})= c21+d(1, {})=4+5=9(2→1)
d(3, {1})= c31+d(1, {})=7+5=12(3→1) d(3, {2})= c32+d(2, {})=5+6=11(3→2)
再向前倒退,有:
d(1, {2, 3})= min{c12+d(2, {3}), c13+ d(3, {2})}=min{2+5, 3+11}=7(1→2)
d(2, {1, 3})=min{c21+d(1, {3}), c23+ d(3, {1})}=min{4+6, 2+12}=10(2→1)
d(3, {1, 2})=min{c31+d(1, {2}), c32+ d(2, {1})}=min{7+8, 5+9}=14(3→2)
最后有:
d(0, {1, 2, 3})=min{c01+ d(1, { 2, 3}), c02+ d(2, {1, 3}), c03+ d(3, {1, 2})}
=min{3+7, 6+10, 7+14}=10(0→1)
所以,从顶点0出发的TSP问题的最短路径长度为10,路径是0→1→2→3→0。
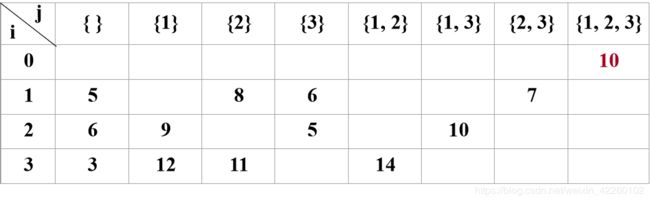
动态规划法求解TSP问题的填表过程
假设n个顶点用0~n-1的数字编号,首先生成1~n-1个元素的子集存放在数组V[2n-1]中,设数组d[n][2n-1]存放迭代结果,其中d[i][j]表示从顶点i经过子集V[j]中的顶点一次且仅一次,最后回到出发点0的最短路径长度。(从顶点0出发)

代码实现
#include
}
}
}
}
cout << "最短路径为" << process[0][(1 << (city_number - 1)) - 1] << endl;
}
//打印过程矩阵
void Tsp::printProcess()
{
int i, j;
for (j = 0; j<1 << (city_number - 1); j++)
{
cout << setw(3) << j;
}
cout << endl;
for (i = 0; i<city_number; i++)
{
for (j = 0; j<1 << (city_number - 1); j++)
{
if (process[i][j] == 0x7ffff)
process[i][j] = -1;
cout << setw(3) << process[i][j];
}
cout << endl;
}
}
//主函数
int main(void)
{
int city_number;
while (cin >> city_number)
{
Tsp tsp(city_number); //初始化城市代价矩阵
tsp.correct(); //纠正用户输入的代价矩阵
tsp.printCity(); //打印城市
tsp.getShoretstDistance(); //求出最短路径
tsp.printProcess(); //打印计算矩阵
}
return 0;
}
运行截图

分析与思考
这个实验主要借鉴了很多学姐的思想,比如说对某一阶段进行判断,可以采用一维并使用最低为相遇的算法进行判断,我相信在后面这个地方回流有很多疑问,因为现在天色已经很晚了,这篇博文就直接发了,如果读者有什么不理解的地方,欢迎进行评论,我们一起针对问题进行交流。