【OpenCV(C++)】图像变换:霍夫变换
【OpenCV(C++)】图像变换:霍夫变换
- 霍夫变换概述
- 霍夫线变换
- 标准霍夫变换:HoughLines()函数
- 累计概率霍夫变换:HoughLinesP()函数
- 霍夫圆变换
- 霍夫圆变换:HoughCircles()函数
在图像处理与计算机视觉领域中,如何从当前的图像中提取所需要的特征信息是图像识别的关键所在。在许多应用场合中需要快速准确地检测出直线或者圆。其中一种非常有效的解决问题的方法是霍夫变换,其为图像处理中从图像中识别几何形状的基本方法之一。
霍夫变换概述
霍夫变换(Hough Transform)是图像处理中的一种特征提取技术。该过程在一个参数空间中通过计算结果的局部最大值得到一个符合该特定形状的集合作为霍夫变换结果。
霍夫变换运用两个坐标空间之间的变换将在一个空间中具有相同形状的曲线或直线映射到另一个坐标空间的一个点上形成峰值,从而把检测任意形状的问题转化为统计峰值问题。
霍夫线变换
霍夫线变换是一种用来寻找直线的方法,在使用霍夫线变换之前,首先要对图像进行边缘检测的处理,即霍夫线变换的直接输入只能是边缘二值图像。
OpenCV支持三种不同的霍夫线变换:
- 标准霍夫变换(Standard Hough Transform,SHT),由HoughLines函数调用。
- 多尺度霍夫变换(Multi-Scale Hough Transform,MSHT),由HoughLines函数调用。
- 累计概率霍夫变换(Progressive Probabilistic Hough Transform,PPHT),由HoughLinesP函数调用。
标准霍夫变换:HoughLines()函数
此函数可以找出采用标准霍夫变换的二值函数图像线条。在OpenCV中可以用其来调用标准霍夫变换SHT和多尺度霍夫变换MSHT的OpenCV内建算法。
void HoughLines(
InputArray image,
OutputArray lines,
double rho,
double theta,
int threshold,
double srn=0,
double stn=0 ) ;
#include 运行效果如下:
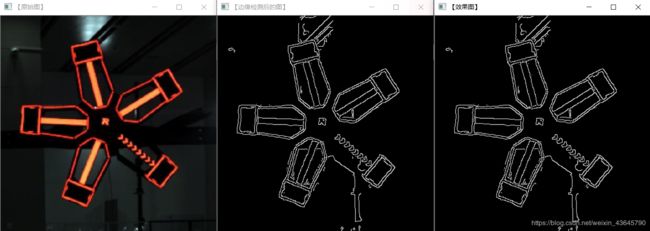
累计概率霍夫变换:HoughLinesP()函数
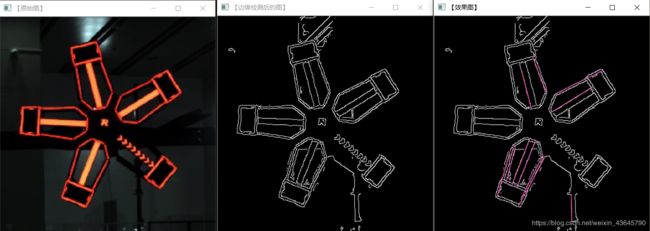
此函数在HoughLines的基础上,在末尾加了一个代表Probabilistic(概率)的P,表明它可以采用累计概率霍夫变换(PPHT)来找出二值图像中的直线。
void HoughLinesP(
InputAaaay image,
OutputArray lines,
double rho,
douube theta,
int threshold,
double minLineLength=0,
double maxLineGap=0) ;
#include 运行效果如下:
霍夫圆变换
霍夫圆变换的基本原理和霍夫线变换大体上类似,只是点对应的二维极径极角空间被三维的圆心点x,y和半径r空间取代。
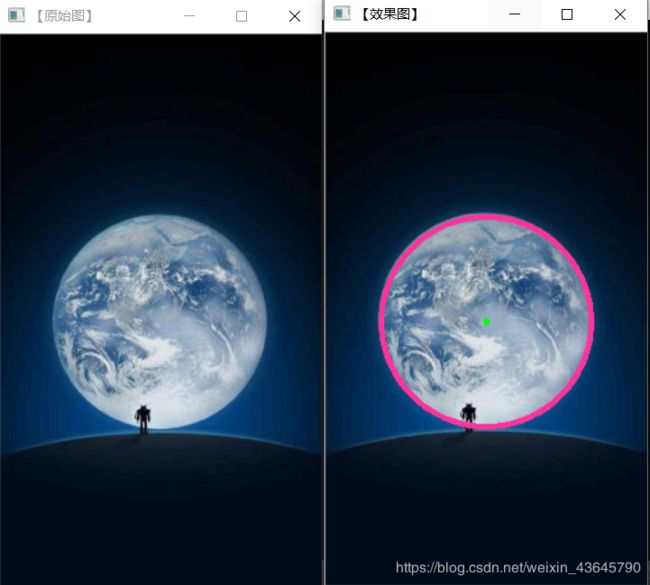
霍夫圆变换:HoughCircles()函数
HoughCircles函数可以利用霍夫变换算法检测出灰度图中的圆。它相比之前的HoughLines和HoughLinesP,比较明显的一个区别是不需要原图是二值的,而HoughLines和HoughLinesP都需要原图为二值图像。
void HoughCircles(
InputArray image,
OutputArray circles,
int method,
double dp,
double minDist,
double param1=100,
double pparam2=100,
int minRadius=0,
int maxRadius=0)
#include