【信号与系统学习笔记】【课程终章】—— 离散傅里叶变换的扩展:z 变换分析2
上文中,我们学习了《信号与系统》的第十章——z变换。这是我们学院教学大纲所要求的最后一章内容。因此,这将是本系列专栏的最后一篇课程笔记啦!但是文章却不止于此,平时关于信号与系统的一些思考我也会继续发上这个专栏的噢!那么下面我们先回顾一下关于z变换,我们之前都说了啥:
1. 常见的z变换对
【1】必须要记得的两个z变换对: a n u [ n ] a^nu[n] anu[n] 的z 变换为: 1 1 − a z − 1 \frac{1}{1 - az^{-1}} 1−az−11,ROC为: ∣ z ∣ > ∣ a ∣ |z| > |a| ∣z∣>∣a∣
【2】 − a n u [ − n − 1 ] -a^nu[-n-1] −anu[−n−1] (左边信号),它的z变换为: 1 1 − a z − 1 \frac{1}{1 - az^{-1}} 1−az−11,ROC为: ∣ z ∣ < ∣ a ∣ |z| < |a| ∣z∣<∣a∣2. ROC 的性质
另外,我们还学习了左边、右边、双边信号和他们的ROC所应该具有的特征;
3. z变换的性质
那么,本次博客我们将会探讨以下几点:1. z变换的ROC和系统性质之间的关系 2. 系统的框图描述 3. 单边z变换
一、z变换与系统的联系
1.1 z变换的ROC与系统因果性的关系
大家记忆:如果说一个系统,它的系统函数的z变换的ROC位于最外层极点的外面,同时ROC还包含了无穷远点时,那么这个系统就是因果的。 这里的"ROC还包含了无穷远点",它的意思就是: ∞ ∞ ∞ 不能是 H(z) 的极点。那么什么时候 ∞ ∞ ∞ 不是 H(z) 的极点呢?—— 如果 H(z) 表示成了多项式之比的形式,且分母项的阶次大于等于分子项的阶次时, ∞ ∞ ∞ 不是 H(z) 的极点,相反,此时 ∞ ∞ ∞ 是 H(z) 的零点。
1.2 z变换的ROC与系统稳定性之间的关系
我们知道,一个系统要想是稳定的,在时域上需要满足下面这个条件: ∑ n = − ∞ + ∞ h [ n ] < ∞ \sum_{n=-∞}^{+∞}h[n] < ∞ n=−∞∑+∞h[n]<∞
这不仅仅说明了系统函数绝对可和,他也说明了系统函数的傅里叶变换一定存在。 那么,到了z域,也是类似的,如果系统函数的z变换的ROC包含了单位圆,我们就可以判断这个系统是稳定的。
1.3 系统结构与H(z)的关系
同样地,我们目前所了解的系统基本结构包括——级联、并联和反馈。我们下面分别来看看:
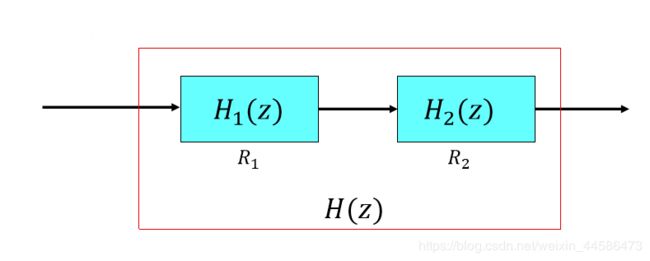
在时域中,系统级联我们用卷积来描述: h 1 [ n ] ∗ h 2 [ n ] h_1[n]*h_2[n] h1[n]∗h2[n]
在频域中,系统级联我们用乘积来描述: H 1 ( e j ω ) H 2 ( e j ω ) H_1(e^{jω})H_2(e^{jω}) H1(ejω)H2(ejω)
那么在复数域里面,我们同样也是用乘积来描述: H 1 ( z ) H 2 ( z ) H_1(z)H_2(z) H1(z)H2(z)
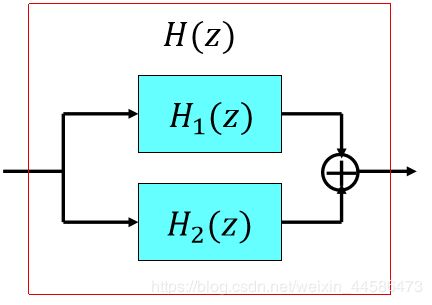
在时域中,系统级联我们用相加来描述: h 1 [ n ] + h 2 [ n ] h_1[n]+h_2[n] h1[n]+h2[n]
在频域中,系统级联我们也用相加来描述: H 1 ( e j ω ) + H 2 ( e j ω ) H_1(e^{jω})+H_2(e^{jω}) H1(ejω)+H2(ejω)
那么在复数域里面,我们同样也是用相加来描述: H 1 ( z ) + H 2 ( z ) H_1(z)+H_2(z) H1(z)+H2(z)
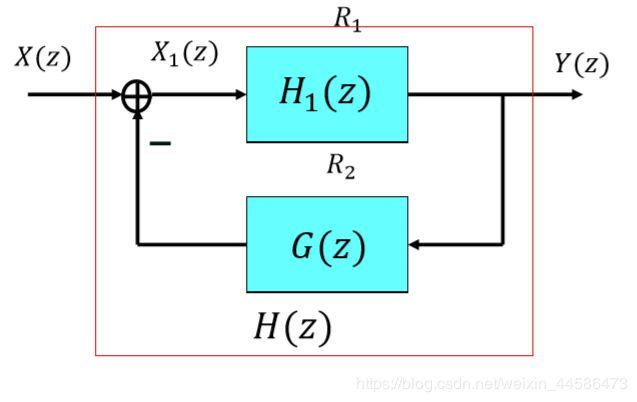
对于反馈系统,我们直接构造 Y ( z ) X ( z ) \frac{Y(z)}{X(z)} X(z)Y(z) ,消除中间变量即可。我们来试试:
首先,反馈的输出我们知道是: Y ( z ) G ( z ) Y(z)G(z) Y(z)G(z),那么就有: X ( z ) − Y ( z ) G ( z ) = X 1 ( z ) X(z) - Y(z)G(z) = X_1(z) X(z)−Y(z)G(z)=X1(z),有因为:
X 1 ( z ) H 1 ( z ) = Y ( z ) X_1(z)H_1(z) = Y(z) X1(z)H1(z)=Y(z),联立上面两个式子,将中间量 X 1 ( z ) X_1(z) X1(z) 消掉即可。
二、系统的框图描述
我们知道,对于离散时间系统而言,常常用差分方程来描述。因此我们约定:在框图里面就只能用:加法器、乘以系数和 z − 1 z^{-1} z−1(等价于延时一个单位时间)
另外框图也分为直接型框图、级联型框图和并联型框图。我们在考试时要按照题目要求画出对应的图。我们下面介绍一下;
分别画出下面这个系统函数
的直接型框图、级联型框图和并联型框图
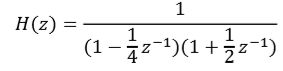
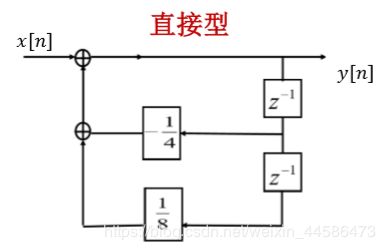
对于初学者而言,也许需要先把差分方程给写出来: y [ n ] = 1 4 y [ n − 1 ] − 1 8 y [ n − 2 ] = x [ n ] y[n] = \frac{1}{4}y[n-1] - \frac{1}{8}y[n-2] = x[n] y[n]=41y[n−1]−81y[n−2]=x[n]
即: y [ n ] = x [ n ] − 1 4 y [ n − 1 ] + 1 8 y [ n − 2 ] y[n] = x[n] - \frac{1}{4}y[n-1] + \frac{1}{8}y[n-2] y[n]=x[n]−41y[n−1]+81y[n−2]
因此,我们就可以画出直接型:
下面给大家支一招:直接型的通法:
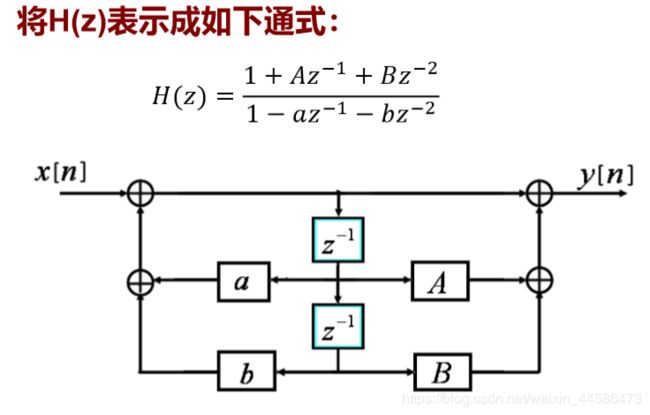
如果题目给出的多项式比,少了哪一项,我们就可以把哪一项的线给它抹去。
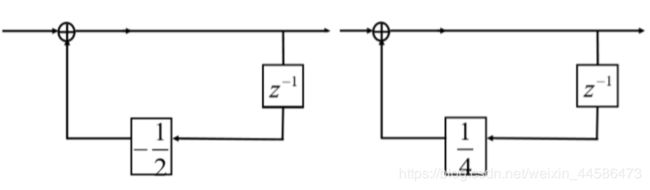
下面是级联型的画法:
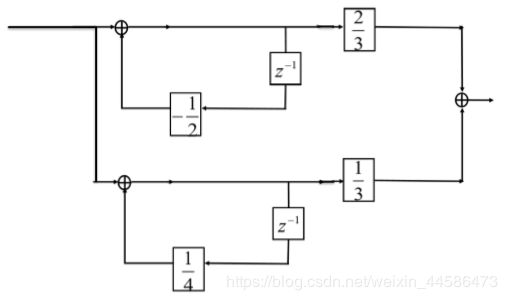
如果要改成并联型,则需要做部分分式展开,框图如下:
三、单边z变换
单边z变换,顾名思义就是求和区间是 [ 0 , + ∞ ] [0, +∞] [0,+∞]。如果信号只是在 [ 0 , + ∞ ] [0, +∞] [0,+∞] 有值,那么双边z变换和单边 z 变换的结果是一样的。如果信号在 n < 0 n < 0 n<0 时还有值,那么两者的结果就不一样了。
另外值得注意的一点是单边z变换的时移特性:
【1】若 x [ n ] x[n] x[n]的单边z变换为: X ( z ) X(z) X(z),那么 x [ n − 1 ] x[n-1] x[n−1] 的单边z变换为: z − 1 X ( z ) + x ( − 1 ) z^{-1}X(z) + x(-1) z−1X(z)+x(−1)、
【2】若 x [ n ] x[n] x[n]的单边z变换为: X ( z ) X(z) X(z),那么 x [ n + 1 ] x[n+1] x[n+1] 的单边z变换为: z 1 X ( z ) + z x ( 0 ) z^{1}X(z) + zx(0) z1X(z)+zx(0)
根据单边z变换的这个性质,我们系统的输出往往就可以分为——零输入响应和零状态响应了。
终于归纳完啦!这一个学期由于疫情的影响变得非常特殊。天天坐在家里,对着博客的页面打字也是一件需要耐得住寂寞的事情哈哈。非常庆幸自己坚持了下来,没有在做前几次笔记之后就打退堂鼓。就因为这样才有了这一片博客的尾声。在此也对阅读我专栏的同学们说一声——加油!!未来可期!