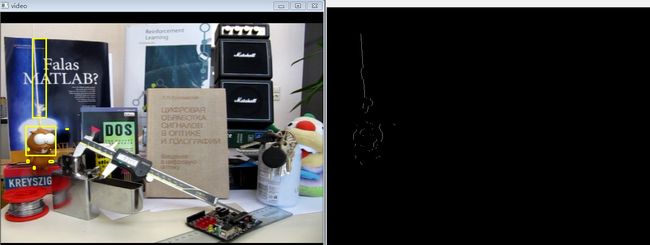
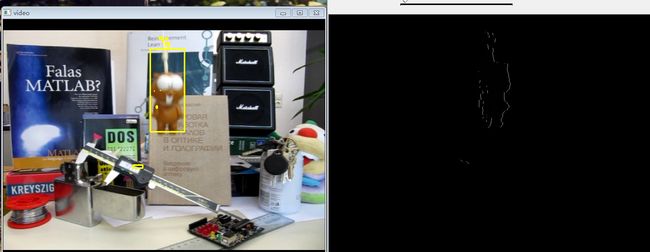
opencv-视频处理-实时前景检测--三帧差法
假设下面的是视频流中的按时间先后顺序的任意三帧图片



依次定义它们的灰度图为:
![]() ,
,![]() ,
,![]()
其中
![]() 代表
代表![]() 的任意一点
的任意一点![]() 处的坐标
处的坐标
![]() 代表
代表![]() 在任意一点
在任意一点![]() 处的坐标
处的坐标
![]() 代表
代表![]() 在任意一点
在任意一点![]() 处的坐标
处的坐标
然后定义:
前两张的灰度的差为:
![]()
后两张的灰度差为:
![]()
最后做一下![]() 和
和![]() “与”运算。
“与”运算。
优点:
实时性高
缺点:
1、运动物体本身颜色相近时,会出现较大的空洞。
2、无法应对光照骤变的情况
下面为整个工程的代码:
#include
using namespace std;
#include
#include
#include
using namespace cv;
const unsigned char FORE_GROUD = 255;
int thresh = 10;
int main(int argc,char*argv[])
{
VideoCapture video(argv[1]);
//判断如果video是否可以打开
if(!video.isOpened())
return -1;
//用于保存当前帧的图片
Mat currentBGRFrame;
//用来保存上一帧和当前帧的灰度图片
Mat previousSecondGrayFrame;
Mat previousFirstGrayFrame;
Mat currentGaryFrame;
//保存两次的帧差
Mat previousFrameDifference;//previousFrameFirst - previousFrameSecond的差分
Mat currentFrameDifference;//currentFrame - previousFrameFirst;
//用来保存帧差的绝对值
Mat absFrameDifferece;
//用来显示前景
Mat previousSegmentation;
Mat currentSegmentation;
Mat segmentation;
//显示前景
namedWindow("segmentation",1);
createTrackbar("阈值:","segmentation",&thresh,FORE_GROUD,NULL);
//帧数
int numberFrame = 0;
//形态学处理用到的算子
Mat morphologyKernel = getStructuringElement(MORPH_RECT,Size(3,3),Point(-1,-1));
for(;;)
{
//读取当前帧
video >> currentBGRFrame;
//判断当前帧是否存在
if(!currentBGRFrame.data)
break;
numberFrame++;
//颜色空间的转换
cvtColor(currentBGRFrame,currentGaryFrame,COLOR_BGR2GRAY);
if( numberFrame == 1)
{
//保存当前帧的灰度图
previousSecondGrayFrame = currentGaryFrame.clone();
//显示视频
imshow("video",currentBGRFrame);
continue;
}
else if( numberFrame == 2)
{
//保存当前帧的灰度图
previousFirstGrayFrame = currentGaryFrame.clone();
//previousFirst - previousSecond
subtract(previousFirstGrayFrame,previousSecondGrayFrame,previousFrameDifference,Mat(),CV_16SC1);
//取绝对值
absFrameDifferece = abs(previousFrameDifference);
//位深的改变
absFrameDifferece.convertTo(absFrameDifferece,CV_8UC1,1,0);
//阈值处理
threshold(absFrameDifferece,previousSegmentation,double(thresh),double(FORE_GROUD),THRESH_BINARY);
//显示视频
imshow("video",currentBGRFrame);
continue;
}
else
{
//src1-src2
subtract(currentGaryFrame,previousFirstGrayFrame,currentFrameDifference,Mat(),CV_16SC1);
//取绝对值
absFrameDifferece = abs(currentFrameDifference);
//位深的改变
absFrameDifferece.convertTo(absFrameDifferece,CV_8UC1,1,0);
//阈值处理
threshold(absFrameDifferece,currentSegmentation,double(thresh),double(FORE_GROUD),THRESH_BINARY);
//与运算
bitwise_and(previousSegmentation,currentSegmentation,segmentation);
//中值滤波
medianBlur(segmentation,segmentation,3);
//形态学处理(开闭运算)
//morphologyEx(segmentation,segmentation,MORPH_OPEN,morphologyKernel,Point(-1,-1),1,BORDER_REPLICATE);
morphologyEx(segmentation,segmentation,MORPH_CLOSE,morphologyKernel,Point(-1,-1),2,BORDER_REPLICATE);
//找边界
vector< vector > contours;
vector hierarchy;
//复制segmentation
Mat tempSegmentation = segmentation.clone();
findContours( segmentation, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );//CV_RETR_TREE
vector< vector > contours_poly( contours.size() );
/*存储运动物体*/
vector boundRect;
boundRect.clear();
//画出运动物体
for(int index = 0;index < contours.size() ;index++)
{
approxPolyDP( Mat(contours[index]), contours_poly[index], 3, true );
Rect rect = boundingRect( Mat(contours_poly[index]) );
rectangle(currentBGRFrame,rect,Scalar(0,255,255),2);
}
//显示视频
imshow("video",currentBGRFrame);
//前景检测
imshow("segmentation",segmentation);
//保存当前帧的灰度图
previousFirstGrayFrame = currentGaryFrame.clone();
//保存当前的前景检测
previousSegmentation = currentSegmentation.clone();
}
if(waitKey(33) == 'q')
break;
}
return 0;
}