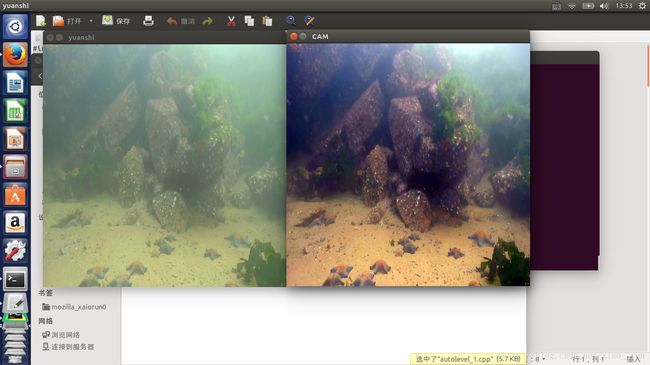
水下图像去雾算法C++实现
图像去雾之何凯明暗通道先验去雾算法原理及自动色阶算法c++代码实现
何凯明博士,2007年清华大学毕业,2011年香港中文大学博士毕业,可谓是功力深厚,感叹于国内一些所谓博士的水平,何这样的博士才可以真正叫做
Doctor。
关于何博士的一些资料和论文,大家可以访问这里:http://research.microsoft.com/en-us/um/people/kahe/
本文主要上是对《Single Image Haze Removal Using Dark Channel Prior》的翻译、整理、及部分解释、代码实现。如果您的英文水平好,建议看原
文可能来的更爽些。
一、论文思想的简单描述
首先看看暗通道先验是什么:
在绝大多数非天空的局部区域里,某一些像素总会有至少一个颜色通道具有很低的值。换言之,该区域光强度的最小值是个很小的数。
我们给暗通道一个数学定义,对于任意的输入图像J,其暗通道可以用下式表达:

式中Jc表示彩色图像的每个通道 ,Ω(x)表示以像素X为中心的一个窗口。
式(5)的意义用代码表达也很简单,首先求出每个像素RGB分量中的最小值,存入一副和原始图像大小相同的灰度图中,然后再对这幅灰度图进行最小值
滤波,滤波的半径由窗口大小决定,一般有WindowSize = 2 * Radius + 1;
暗通道先验的理论指出:

实际生活中造成暗原色中低通道值主要有三个因素:a)汽车、建筑物和城市中玻璃窗户的阴影,或者是树叶、树与岩石等自然景观的投影;b)色彩鲜艳的物
体或表面,在RGB的三个通道中有些通道的值很低(比如绿色的草地/树/植物,红色或黄色的花朵/叶子,或者蓝色的水面);c)颜色较暗的物体或者表面,
例如灰暗色的树干和石头。总之,自然景物中到处都是阴影或者彩色,这些景物的图像的暗原色总是很灰暗的。
在作者的论文中,统计了5000多副图像的特征,也都基本符合这个先验,因此,我们可以认为其实一条定理。
有了这个先验,接着就需要进行一些数学方面的推导来最终解决问题。
首先,在计算机视觉和计算机图形中,下述方程所描述的雾图形成模型被广泛使用:

其中,I(X)就是我们现在已经有的图像(待去雾的图像),J(x)是我们要恢复的无雾的图像,A是全球大气光成分, t(x)为透射率。现在的已知条件就是
I(X),要求目标值J(x),显然,这是个有无数解的方程,因此,就需要一些先验了。
将式(1)稍作处理,变形为下式:

如上所述,上标C表示R/G/B三个通道的意思。
首先假设在每一个窗口内透射率t(x)为常数,定义他为 ,并且A值已经给定,然后对式(7)两边求两次最小值运算,得到下式:
,并且A值已经给定,然后对式(7)两边求两次最小值运算,得到下式:

上式中,J是待求的无雾的图像,根据前述的暗原色先验理论有:

因此,可推导出:

把式(10)带入式(8)中,得到:

下面我给出自动色阶算法,暗通道去雾算法到处都是代码了
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
Mat autolevel(Mat matface,double dlowcut,double dhighcut)
{
uchar allmap[256*3] = {0};
//double dlowcut = 0.5;
//double dhighcut = 0.5;
long T_1 = clock();
vector rgb_planes;
split(matface,rgb_planes);
Mat HistBlue,HistGreen,HistRed;
int histSize = 256;
float range[] = { 0, 255 } ;
const float* histRange = { range };
bool uniform = true; bool accumulate = false;
calcHist( &rgb_planes[0], 1, 0, Mat(), HistRed, 1,&histSize, &histRange, uniform, accumulate );
calcHist( &rgb_planes[1], 1, 0, Mat(), HistGreen, 1, &histSize, &histRange, uniform, accumulate );
calcHist( &rgb_planes[2], 1, 0, Mat(), HistBlue, 1, &histSize, &histRange, uniform, accumulate );
printf("\n hist time %f ms.\n",(double)(clock() - T_1));
int PixelAmount = matface.rows*matface.cols;
//printf("%d\n",PixelAmount);
float isum = 0;
// blue
long T_2 = clock();
int iminblue=0;int imaxblue=0;
for (int y = 0;y<256;y++)
{
isum= isum + HistBlue.at(y);
//printf("%d\n",(int)HistBlue.at(y));
//isum= isum+HistBlue[y];
if (isum>=PixelAmount*dlowcut*0.01)
{
iminblue = y;
break;
}
}
//printf("%d\n",iminblue);
isum = 0;
for (int y=255;y>=0;y--)
{
isum=isum + HistBlue.at(y);
//isum=isum+HistBlue[y];
if (isum>=PixelAmount*dhighcut*0.01)
{
imaxblue=y;
break;
}
}
isum=0;
int iminred=0;int imaxred=0;
for (int y = 0;y<256;y++)
{
isum= isum+HistRed.at(y);
//isum= isum+HistRed[y];
if (isum>=PixelAmount*dlowcut*0.01)
{
iminred = y;
break;
}
}
//printf("%d\n",iminred );
isum = 0;
for (int y=255;y>=0;y--)
{
isum=isum+HistRed.at(y);
//isum=isum+HistRed[y];
if (isum>=PixelAmount*dhighcut*0.01)
{
imaxred=y;
break;
}
}
//printf("%d\n",imaxred);
//green
isum=0;
int imingreen=0;int imaxgreen=0;
for (int y = 0;y<256;y++)
{
isum= isum+HistGreen.at(y);
//isum= isum+HistGreen[y];
if (isum>=PixelAmount*dlowcut*0.01)
{
imingreen = y;
break;
}
}
//printf("%d\n",imingreen);
isum = 0;
for (int y=255;y>=0;y--)
{
isum=isum+HistGreen.at(y);
//isum=isum+HistGreen[y];
if (isum>=PixelAmount*dhighcut*0.01)
{
imaxgreen=y;
break;
}
}
printf("\n cut time %f ms.\n",(double)(clock() - T_2));
long T_3 = clock();
#pragma omp parallel for
for (int y=0;y<256;y++)
{
if (y<=iminblue)
{
allmap[y*3+2]=0;
}
else
{
if (y>imaxblue)
{
allmap[y*3+2]=255;
}
else
{
float ftmp = (float)(y-iminblue)/(imaxblue-iminblue);
allmap[y*3+2]=(uchar)(ftmp*255);
}
}
}
//red
#pragma omp parallel for
for (int y=0;y<256;y++)
{
if (y<=iminred)
{
allmap[y*3]=0;
}
else
{
if (y>imaxred)
{
allmap[y*3]=255;
}
else
{
float ftmp = (float)(y-iminred)/(imaxred-iminred);
allmap[y*3]=(uchar)(ftmp*255);
}
}
}
//green
#pragma omp parallel for
for (int y=0;y<256;y++)
{
if (y<=imingreen)
{
allmap[y*3+1]=0;
}
else
{
if (y>imaxgreen)
{
allmap[y*3+1]=255;
}
else
{
float ftmp = (float)(y-imingreen)/(imaxgreen-imingreen);
allmap[y*3+1]=(uchar)(ftmp*255);
}
}
}
printf("\n map time %f ms.\n",(double)(clock() - T_3));
long T_4 = clock();
Mat lut(1,256,CV_8UC3,allmap);
LUT(matface,lut,matface);
printf("\n values time %f ms.\n",(double)(clock() - T_4));
return matface;
}
int main()
{
bool flag;
VideoCapture cap("test.avi"); //打开摄像头
// 如果要打开本地视频采用 VideoCapture cap("***.avi");
// if(!cap.isOpened()) return -1; //检测一下摄像头是否打开
Mat frame;
Mat result;
// Mat result2;
flag=true;
while(flag){
cap>>frame;
cv::resize(frame, result, cv::Size(512, 512), (0, 0), (0, 0), cv::INTER_LINEAR);
cv::resize(frame, frame, cv::Size(512, 512), (0, 0), (0, 0), cv::INTER_LINEAR);
// cv::resize(frame, result2, cv::Size(512, 512), (0, 0), (0, 0), cv::INTER_LINEAR);
imshow("yuanshi",frame);
result=autolevel(result,0.5,0.5) ;
// result2=autolevel(result,1,0.5) ;
//namedWindow("xiaorun Opencv CAM",CV_WINDOW_AUTOSIZE) ; //读取当前帧
// 此处可添加图像处理算法,对图像进行处理,当然了,我们可以不做任何操作,只打开一下摄像头
imshow("CAM", result); //显示一下
// imshow("CAM2", result2); //显示一下
if(waitKey(20) >=0) break; // 等待按键,跳出循环
}
}
/*int main()
{
Mat I = imread("14.jpg");
long T_1 = clock();
Mat dehaze = autolevel(I,0.5,0.5);
printf("\nTotal Time: %f ms.\n", (double)(clock() - T_1));
namedWindow("dehaze",WINDOW_NORMAL);
imshow("dehaze",dehaze);
imwrite("dehaze.jpg",dehaze);
waitKey(0);
destroyAllWindows();
return 0;
}*/