笔记:Inductive Robust Principal Component Analysis
Bao, B.K., et al., Inductive robust principal component analysis. IEEE Transactions on Image Processing, 2012. 21(8): p. 3794-3800.
本文针对经典的 Inductive Robust Principal Component Analysis 的理论方法进行展开详解。本人学术水平有限,文中如有错误之处,敬请指正。
摘要:RPCA 是一种直推式方法,并不能很好地处理新的样本。如果一个新的数据加入,RPCA需要重新计算所有的数据,导致非常高的计算代价。所以,RPCA 是一个不适用于在线计算(数据会分批按顺序加入)的应用。为了克服这个难题,此文提出了一个 inductive robust principal component analysis (IRPCA)方法,给定一组训练数据,和 RPCA 不同的是,(RPCA 旨在恢复原始数据矩阵),IRPCA 目标是学习一个潜在的投影矩阵,可以有效地去除数据中的损坏。
1 简介
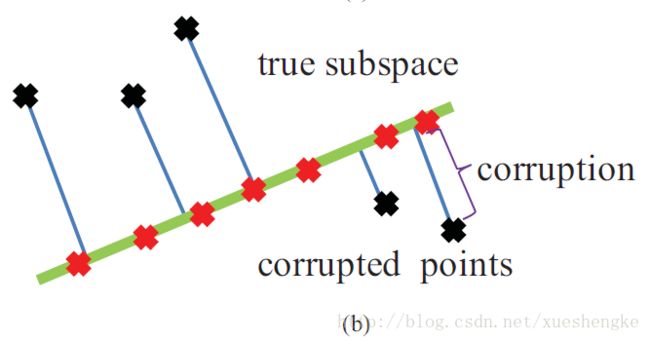
假设有一个误差修正的问题:数据组成部分如下
其中 y 是低秩的子空间部分, e 是误差项。给定任意的数据向量 x ,求解的目标是从原始数据中分离出向量 y 和误差 e 。
上述问题等价于找出数据中的主成分,因为低秩的子空间可以被退化的高斯分布很好地建模。前提是误差服从小方差的高斯分布,广泛使用的主成分分析(PCA)可以有效地处理上述问题。有 n 个训练数据, X=[x1,x2,⋯,xn] ,PCA 通过最小化重建误差,来学习低秩投影,
其中 Ir 是一个 r×r 的单位矩阵, ||⋅||2F 表示 Frobenious 范数, r 是 U 的秩( U 的列数)。这个优化问题可以有效地用奇异值分解(SVD)求出。假设 U∗ 是从训练数据 X 求出的解,有了一个数据 x ,它的主成分可以估计出
这个方法计算很有效,而且稳定,使 PCA 被广泛用于误差修正。然而,在实际应用中,PCA 对严重的损坏效果很差,通常是偏离真实的子空间。

为了克服 PCA 的缺陷,Wright et al. 1 2 提出了 robust principal componen analysis (RPCA) ,成功应用于各个方面。
同样给定一组数据 X=[x1,x2,⋯,xn] ,RPCA 找到其主成分 Y=[y1,y2,⋯,yn] ,通过如下的凸优化问题
其中 ||⋅||∗ 表示核范数(矩阵的奇异值之和), ||⋅||1 表示 ℓ1 范数, λ 是权衡参数。假设损坏是足够稀疏的。这个稀疏假设是合理的、现实中普遍存在的。然而 RPCA 很难扩展已学习到的模型到新的数据上。可能处理测试数据的步骤: Y∗,E∗ 是从训练数据学习到的解,计算 Y∗ 的 SVD, Y∗=U∗Σ∗(V∗)T ;然后用 y=U∗(U∗)Tx 处理新数据。这个方法的实际效果很差。更具体来说, (Y∗,E∗)↔(U∗(U∗)TX,X−U∗(U∗)TX) 其实不接近,重构的解是不正确的。并且 E∗ 不是稀疏的。RPCA 不适用于在线计算的应用。
于是,此文提出了 inductive principal componen analysis (IRPCA),不仅可以处理严重的损坏(相比于 RPCA),并且有良好的泛化能力。关键在于:从训练数据中学习出一个低秩投影,它能有效地移除误差,并把数据投影到其潜在的子空间中。
2 相关工作
Liu et al. 3 (基于 RPCA)提出了 low-rank representation (LRR) 模型
其中 A 是数据空间的字典, ||⋅||ℓ 根据具体情况选择合适的范数。如果 A=I ,那么 LRR 就变成了 RPCA 。子空间分割可以用 LRR 解决
其中区别是 A=X , ||E||2,1=∑nj=1∑di=1([E]ij)2−−−−−−−−−−√ 。这个方法也有 RPCA 同样的缺点:不能很好地处理新数据,需要重新计算,代价很高。
3 目标优化求解
3.1 模型建立
如果损坏没有任何的限制,那么 IRPCA 也是不实用的。比如,损坏是无序的,一般情况下没有简单的模型可以拟合它。幸运的是,IRPCA 是可行的。首先,即使损坏是乱序的,也能存在一个线性投影 P0 把数据投影到子空间中,能正确地恢复出数据(即使不是完全精确的恢复);

其次,两个高维的向量,通常是独立的,近似是相互正交 4,也就是说,损坏通常不在正确的子空间中。这样的情况下, P0 严格地从数据中去除损坏。只要有数据 x ,其主成分就可以通过 y=P0x 获得。
开始建立优化模型,训练数据 X=[x1,x2,⋯,xn] 。目的是学习低秩投影 P0 ,给出如下优化函数
其中 λ 是系数, ||⋅||0 是 ℓ0 范数。该目标函数是不连续性的,因为 rank(⋅) 和 ℓ0 存在。根据通常的方法,采用核范数代替。同时, ℓ0 也用 ℓ1 代替。重新构建的凸的优化问题
假设最优解 P∗ 已经得到。对于一个新的数据 x ,我们估计其主成分 y=P∗x 和误差 e=x−P∗x ,计算很快速、简便。
3.2 优化求解
首先将上述问题转化为其转置的形式
根据论文 5 中提到,其计算复杂度是 O(d3) ,对高维数据代价更大。考虑到计算的效率,此文不直接求解该问题,而是到一个更简单的形式(参考 Theorem 1 6): P∗ 总是在 X 的各列分布的字空间中。 P∗ 可以被分解为 P∗=L∗(Q∗)T ,其中 Q∗ 可以由正交化 X 的各列得到。于是,问题被转化为如下的形式
其中 A=(Q∗)TX , ||⋅||∗ 表示核范数, ||⋅||1 表示 ℓ1 范数, λ 是权衡参数。
构建 Lagrangian 函数
其中 Y1,Y2∈Rm×n 分别是 Lagrange 乘子矩阵, tr(⋅) 是迹函数, μ 是惩罚项系数(非变量), ||⋅||F 表示 Frobenius 范数。显然,优化目标函数可以给出
其中 ρ>1 是一个常数,用于不断增加 μ 的值。
由于优化目标函数中含有多个变量,通常的做法是每次最小化求解一个变量,而固定其他变量,之后更新 Lagrange 乘子,反复迭代直至收敛。论文使用经典的 inexact Augmented Lagrange Multiplier Method,也叫交替方向乘子法(Alternating Direction Multiplier Method),
迭代更新参数中还加入了 singular value thresholding (SVT) 和 shrinkage 操作,
其中 α>0 是一个设定的阈值。这是一个标量函数,对于矩阵或向量的操作都是 elementwise 的。
给出具体的迭代公式,推导过程见 Appendix,
其中 Sα(⋅) 就是为了近似代替优化求解过程中的 ||J||∗+λ||E||1 而加入的;也就是说,在梯度求解 Lk+1,Ek+1,Jk+1 的过程中,并没有考虑这两项,而是用减去 Ek 的较小的元素值 Sλ/μ(Ek) ,和减去 Jk 的部分(较小的)奇异值 S1/μ(Σ) 来代替,直接求闭式解表达式。
优化步骤的迭代停止条件:
其中 ||⋅||∞ 表示最大范数,定义为矩阵中最大的元素绝对值 ||A||∞=maxi,j{|aij|} 。
4 实验
略
Appendix
原论文中的公式有明显的符号错误。
求解 Lk+1 , 当 ∂L∂L=0 时,( ||J||∗+λ||E||1 与 L 无关)
∂L∂L∂L∂LLk+1=∂∂L{tr(YT1k(X−LA−Ek))+tr(YT2k(L−Jk))+μ2(||X−LA−Ek||2F+||L−Jk||2F)}=−Y1kAT+Y2k−μ(X−LA−Ek)AT+μ(L−Jk)=μL(I+AAT)+(Y2k−Y1kAT)+μ((Ek−X)AT−Jk),=0,=((X−Ek)AT+Jk+Y1kAT−Y2kμ)(I+AAT)−1.求解 Ek+1 , 当 ∂L∂E=0 时,( ||J||∗ 与 E 无关, λ||E||1 用 Sλ/μ(⋅) 近似)
∂L∂E∂L∂EEk+1=∂L∂E{tr(YT1k(X−Lk+1A−E))+μ2||X−Lk+1A−E||2F}=−Y1k+μ(E+Lk+1A−X),=0,=Sλμ(X−Lk+1A+Y1kμ).求解 Jk+1 , 当 ∂L∂J=0 时,( λ||E||1 与 J 无关, ||J||∗ 用 S1/μ(Σ), Σ=svd(⋅) 近似)
∂L∂J∂L∂J(U,Jk+1=∂L∂J{tr(YT2k(Lk+1−J))+μ2||Lk+1−J||2F}=−Y2k+μ(J−Lk+1),=0,Σ,V)=svd(Lk+1+Y2kμ),=US1μ(Σ)VT.
- E. J. Candes, X. Li, Y. Ma, and J. Wright. (2009, Dec.). Robust Principal Component Analysis? [Online]. Available: http://wwwstat.stanford.edu/∼candes/papers/RobustPCA.pdf ↩
- J. Wright, A. Ganesh, S. Rao, Y. Peng, and Y. Ma, “Robust principal component analysis: Exact recovery of corrupted low-rank matrices via convex optimization,” in Proc. Neural Inf. Process. Syst., 2009, pp. 1–9. ↩
- G. Liu, Z. Lin, and Y. Yu, “Robust subspace segmentation by low-rank representation,” in Proc. Int. Conf. Mach. Learn., 2010, pp. 1–8. ↩
- R. R. Hamming, Art of Doing Science and Engineering: Learning to Learn. Boca Raton, FL: CRC Press, 1997, p. 364. ↩
- G. Liu, Z. Lin, and Y. Yu, “Robust subspace segmentation by low-rank representation,” in Proc. Int. Conf. Mach. Learn., 2010, pp. 1–8. ↩
- G. Liu, Z. Lin, S. Yan, J. Sun, Y. Yu, and Y. Ma. (2010). Robust Recovery of Subspace Structures by Low-Rank Representation [Online]. Available: http://arxiv.org/pdf/1010.2955.pdf ↩