Linux系统自带SPI接口驱动自测
本文主要验证linux-imx_share\Documentation\spi目录下spidev_test.c的测试例程,能否正常控制SPI接口。
一.开发环境分析
虚拟机导入的Ubuntu内核版本

ARM内核版本:
![]()
ARM的CPU处理器:freescale的i.mx6系列的处理器,型号为MCIMX6U7CVM08AC ,ARM双核A9。
官网上查到对应的数据手册为《i.MX 6Solo/6DualLite Applications Processor Reference Manual》。
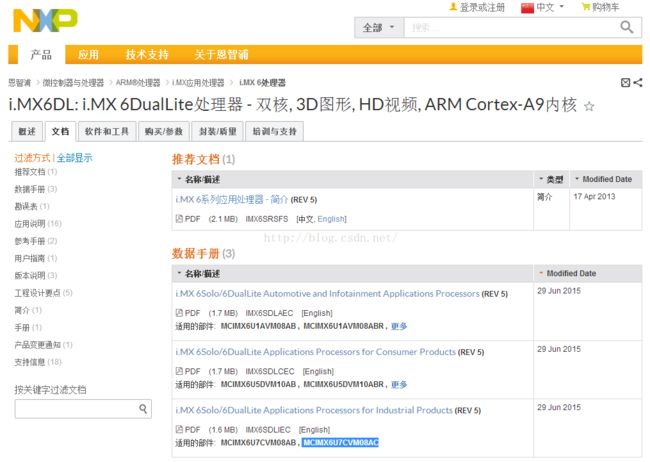
根据数据手册,第8章8.5.4.3.1节,P421,表8-23表示,该i.mx6dl的处理器只有4个SPI接口。

检查杭州迈冲科技发货的底板,没有SPI接口引出来,该底板唯一引出的ECSPI5接口只有四核的处理器可以用,不适合该处理器。
二.驱动配置
1.修改设备树
找到内核源码的linux-imx_share\arch\arm\boot\dts目录下的imx6qdl-sabresd.dtsi,找到ecspi1的代码
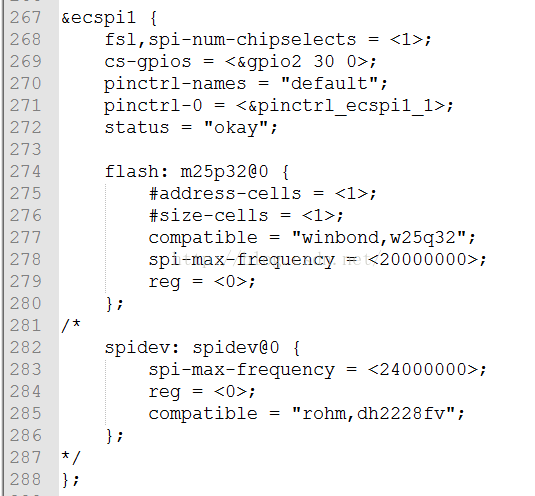
将spidev这段注释去掉,开启这段代码。
2.修改内核配置
输入:make ARCH=arm menuconfig进行内核配置,进入配置界面,依次选择Device Drivers->SPI support,使User mode SPI device driver support选项起作用,选择Y,并save。
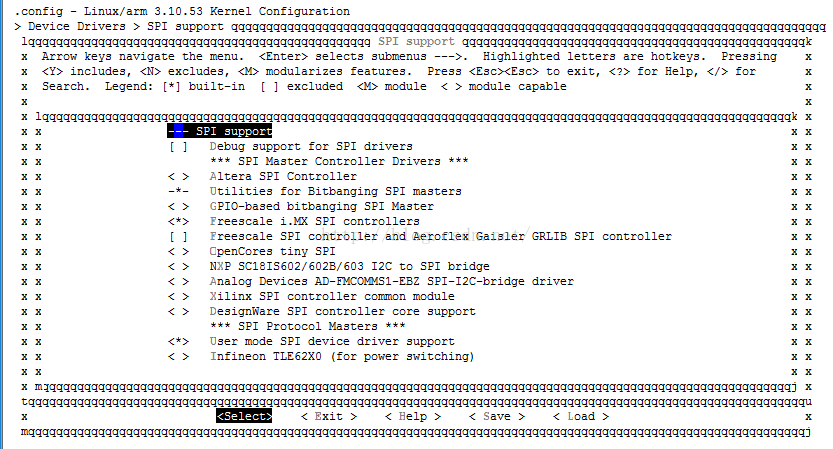
选择这个的目的是使spidev.c参与编译,原因可以参考linux-imx_share\drivers\spi目录下的Kconfig和Makefile。


配置好之后,运行./build.sh,编译生成zImage,zImage-imx6dl-sabresd-emmc.dtb烧写进板子。
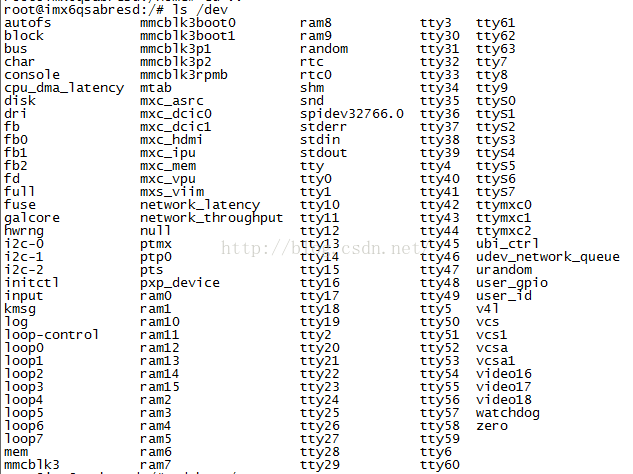
检查新烧进去的系统里,dev目录下有无spidev32766.0。如有,表示spidev的设备驱动烧写成功。
三.测试
1.找到ECSPI的引脚,连接MISO和MOSI,进行自回环测试。

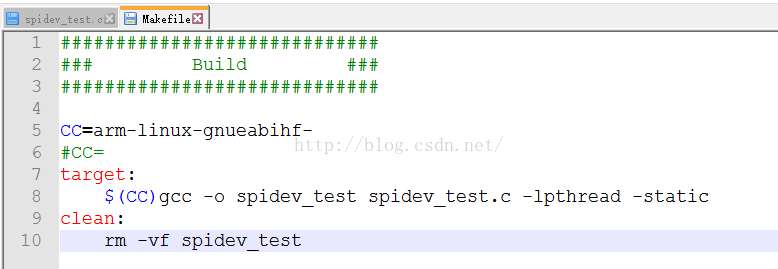
2.编写makefile生成自测代码spidev_test.c对应的可执行程序。
使用rz命令,将spidev_test上载至板子
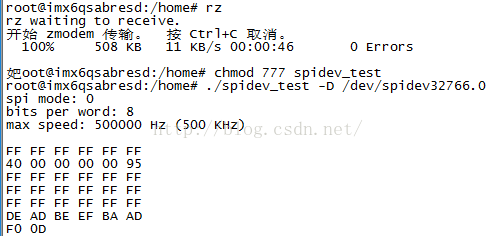
接收的数据正确,自回环测试成功。
------------------------------------------------------------------------------------------------------------------------------------
疑问:生成的设备节点为什么是spidev32766.0?
在spidev.c中的函数spidev_probe里,找到设备节点的赋值。
spidev->devt = MKDEV(SPIDEV_MAJOR, minor); //计算出设备号
//创建设备/dev/spidev%d.%d(spidev总线号.片选号)
dev = device_create(spidev_class, &spi->dev, spidev->devt,
spidev, "spidev%d.%d",
spi->master->bus_num, spi->chip_select);在drivers/spi目录下的spi.c文件中,spi_alloc_master函数中,给master->bus_num = -1进行了初始化。
struct spi_master *spi_alloc_master(struct device *dev, unsigned size)
{
struct spi_master *master;
if (!dev)
return NULL;
master = kzalloc(size + sizeof(*master), GFP_KERNEL);
if (!master)
return NULL;
device_initialize(&master->dev);
master->bus_num = -1; //初始化
master->num_chipselect = 1;
master->dev.class = &spi_master_class;
master->dev.parent = get_device(dev);
spi_master_set_devdata(master, &master[1]);
return master;
}/* convention: dynamically assigned bus IDs count down from the max */
if (master->bus_num < 0) { /* FIXME switch to an IDR based scheme, something like
* I2C now uses, so we can't run out of "dynamic" IDs
*/
master->bus_num = atomic_dec_return(&dyn_bus_id);
dynamic = 1;
}其中dyn_bus_id计算结果是32767
static atomic_t dyn_bus_id = ATOMIC_INIT((1<<15) - 1);#define atomic_dec_return(v) (atomic_sub_return(1, v))static inline int atomic_sub_return(int i, atomic_t *v)
{
unsigned long flags;
int val;
raw_local_irq_save(flags);
val = v->counter;
v->counter = val -= i;
raw_local_irq_restore(flags);
return val;
}of_register_spi_devices函数里chip_select的获得是通过value赋值的,而value是通过设备树里的reg后面的值取得的
/* Device address */
rc = of_property_read_u32(nc, "reg", &value);
if (rc) {
dev_err(&master->dev, "%s has no valid 'reg' property (%d)\n",
nc->full_name, rc);
spi_dev_put(spi);
continue;
}
spi->chip_select = value;spidev: spidev@0 {
spi-max-frequency = <24000000>;
reg = <0>;
compatible = "rohm,dh2228fv";
};如果在imx6qdl-sabresd.dtsi设备树里,改成下面这样,则生成的设备节点号是spidev32766.1。
&ecspi1 {
fsl,spi-num-chipselects = <2>; //改成2
cs-gpios = <&gpio2 30 0>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi1_1>;
status = "okay";
flash: m25p32@0 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "winbond,w25q32";
spi-max-frequency = <20000000>;
reg = <0>;
};
spidev: spidev@1 {
spi-max-frequency = <24000000>;
reg = <1>;
compatible = "rohm,dh2228fv";
};
};