Convolutional Pose Machines
cpm是CMU开源项目OpenPose的前身,目前在MPII竞赛single person中排名第七。
Pose estimation任务属于FCN的一种,输入是一张人体姿势图,输出n张热力图,代表n个关节的响应。

CPM网络结构如下图所示,X代表了经典的VGG结构,在每个stage末用1✖️1卷积输出heatmap,与label计算loss(中间监督)。
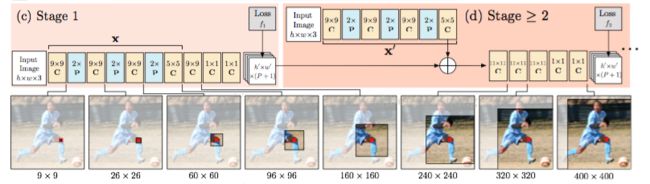
在cpm中,网络有一个格外的输入: center map,center map为一个高斯响应。因为cpm处理的是单人pose的问题,如果图片中有多人,那么center map可以告诉网络,目前要处理的那个人的位置。 因为这样的设置,cpm也可以自底向上地处理多人pose的问题。如psycharo给出的TensorFlow版本,测试的时候先用一个person net来预测图片中每个人的中心位置,然后对中心位置来预测pose。
用TensorFlow实现CPM:
第一步实现网络。
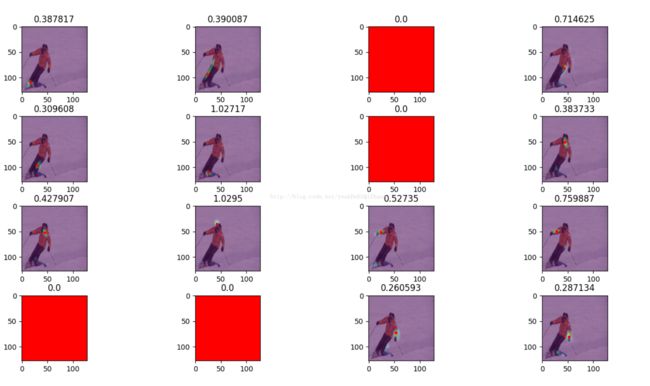
首先定义卷积部分,要注意到每个stage结束输出的heatmap不应该加relu激活函数,否则训练的时候会梯度爆炸,即输出的heatmap会随机地出现某一通道数值全为0(找不到关节点),如下图,红点代表heatmap最大值位置。
def conv2d(inputs, shape, strides, padding='SAME', stddev=0.005, activation_fn=True):
kernel = tf.Variable(tf.truncated_normal(shape,
dtype=tf.float32, stddev=stddev))
conv = tf.nn.conv2d(inputs, kernel, strides, padding=padding)
bias = tf.Variable(tf.truncated_normal([shape[-1]],
dtype=tf.float32, stddev=stddev))
conv = tf.nn.bias_add(conv, bias)
if activation_fn:
conv = tf.nn.relu(conv)
return conv接着定义stage ≥ 2 部分
def muti_conv2d(inputs):
Mconv1_stage = conv2d(inputs, [11, 11, 47, 128], [1, 1, 1, 1])
Mconv2_stage = conv2d(Mconv1_stage, [11, 11, 128, 128], [1, 1, 1, 1])
Mconv3_stage = conv2d(Mconv2_stage, [11, 11, 128, 128], [1, 1, 1, 1])
Mconv4_stage = conv2d(Mconv3_stage, [1, 1, 128, 128], [1, 1, 1, 1])
Mconv5_stage = conv2d(Mconv4_stage, [1, 1, 128, joints_num], [1, 1, 1, 1], activation_fn=False)
return Mconv5_stagedef cpm(images, center_map):
pool_center_map = tf.nn.avg_pool(center_map, ksize=[1, 9, 9, 1], strides=[1, 8, 8, 1], padding='SAME')
#stage 1
conv1_stage1 = conv2d(images, [9, 9, 3, 128], [1, 1, 1, 1])
pool1_stage1 = tf.nn.max_pool(conv1_stage1, [1, 3, 3, 1], [1, 2, 2, 1], padding='SAME')
conv2_stage1 = conv2d(pool1_stage1, [9, 9, 128, 128], [1, 1, 1, 1])
pool2_stage1 = tf.nn.max_pool(conv2_stage1, [1, 3, 3, 1], [1, 2, 2, 1], padding='SAME')
conv3_stage1 = conv2d(pool2_stage1, [9, 9, 128, 128], [1, 1, 1, 1])
pool3_stage1 = tf.nn.max_pool(conv3_stage1, [1, 3, 3, 1], [1, 2, 2, 1], padding='SAME')
conv4_stage1 = conv2d(pool3_stage1, [5, 5, 128, 32], [1, 1, 1, 1])
conv5_stage1 = conv2d(conv4_stage1, [9, 9, 32, 512], [1, 1, 1, 1])
conv6_stage1 = conv2d(conv5_stage1, [1, 1, 512, 512], [1, 1, 1, 1])
conv7_stage1 = conv2d(conv6_stage1, [1, 1, 512, joints_num], [1, 1, 1, 1], activation_fn=False)
tf.add_to_collection('heatmaps', conv7_stage1)
#stage 2
conv1_stage2 = conv2d(images, [9, 9, 3, 128], [1, 1, 1, 1])
pool1_stage2 = tf.nn.max_pool(conv1_stage2, [1, 3, 3, 1], [1, 2, 2, 1], padding='SAME')
conv2_stage2 = conv2d(pool1_stage2, [9, 9, 128, 128], [1, 1, 1, 1])
pool2_stage2 = tf.nn.max_pool(conv2_stage2, [1, 3, 3, 1], [1, 2, 2, 1], padding='SAME')
conv3_stage2 = conv2d(pool2_stage2, [9, 9, 128, 128], [1, 1, 1, 1])
pool3_stage2 = tf.nn.max_pool(conv3_stage2, [1, 3, 3, 1], [1, 2, 2, 1], padding='SAME')
conv4_stage2 = conv2d(pool3_stage2, [5, 5, 128, 32], [1, 1, 1, 1])
concat_stage2 = tf.concat(axis=3, values=[conv4_stage2, conv7_stage1, pool_center_map])
Mconv_stage2 = muti_conv2d(concat_stage2)
tf.add_to_collection('heatmaps', Mconv_stage2)
#stage3
conv1_stage3 = conv2d(pool3_stage2, [5, 5, 128, 32], [1, 1, 1, 1])
concat_stage3 = tf.concat(axis=3, values=[conv1_stage3, Mconv_stage2, pool_center_map])
Mconv_stage3 = muti_conv2d(concat_stage3)
tf.add_to_collection('heatmaps', Mconv_stage3)
#stage4
conv1_stage4 = conv2d(pool3_stage2, [5, 5, 128, 32], [1, 1, 1, 1])
concat_stage4 = tf.concat(axis=3, values=[conv1_stage4, Mconv_stage3, pool_center_map])
Mconv_stage4 = muti_conv2d(concat_stage4)
tf.add_to_collection('heatmaps', Mconv_stage4)
# stage5
conv1_stage5 = conv2d(pool3_stage2, [5, 5, 128, 32], [1, 1, 1, 1])
concat_stage5 = tf.concat(axis=3, values=[conv1_stage5, Mconv_stage4, pool_center_map])
Mconv_stage5 = muti_conv2d(concat_stage5)
tf.add_to_collection('heatmaps', Mconv_stage5)
# stage6
conv1_stage6 = conv2d(pool3_stage2, [5, 5, 128, 32], [1, 1, 1, 1])
concat_stage6 = tf.concat(axis=3, values=[conv1_stage6, Mconv_stage5, pool_center_map])
Mconv_stage6 = muti_conv2d(concat_stage6)
return Mconv_stage6
第二步定义loss
image_batch, heatmap_batch, center_map_batch = read_and_decode(['your tfrecord path'])
output = cpm(image_batch, center_map_batch)
loss = tf.nn.l2_loss(heatmap_batch - output)
interm_loss = tf.reduce_sum(tf.stack([tf.nn.l2_loss(heatmap_batch - o) for o in tf.get_collection('heatmaps')]))
total_loss = loss + interm_loss
optimizer = tf.train.AdamOptimizer(1e-4).minimize(total_loss)参考资料:
- http://blog.csdn.net/shenxiaolu1984/article/details/51094959
- http://blog.csdn.net/zimenglan_sysu/article/details/52077138
- http://blog.csdn.net/layumi1993/article/details/51854722
- http://hypjudy.github.io/2017/05/04/pose-estimation/
GitHub相关代码:
- https://github.com/shihenw/convolutional-pose-machines-release
- http://github.com/psycharo/cpm
- http://github.com/timctho/ConvolutionalPoseMachines-Tensorflow