试验任务配置
试验任务配置
步骤1 移植光敏传感器代码,通过传感器采集光照亮度
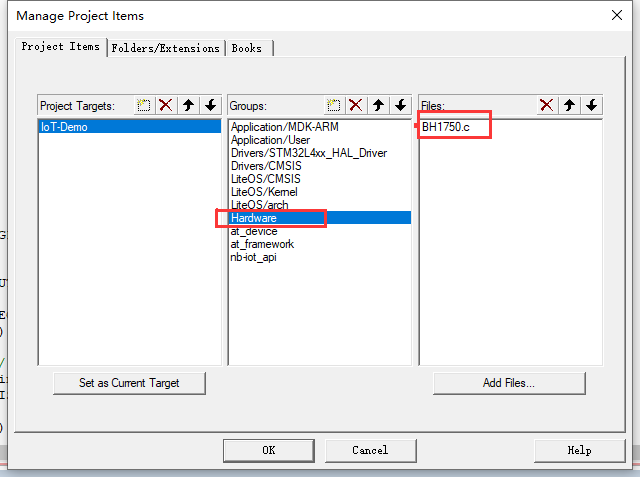
在Keil环境中右击"loT-Demo"选择”Manage Project Items...";
在”Project Items '标签下的”Groups'中添加’Hardware",并在该group下添加光敏传感器代码;

添加"IoT-Demo-LiteOS\targets\ HarewarelBH1750"目录下的"BH1750.c”文件,点击"OK";
在"Option for Target 'loT-Demo' "界面下选择"C/C++”,添加光感传感器代码的头文件路径(”IoT-Demo-LiteOS\targets\Hardware\BH1750“);

在"main.h"/*USER CODE BEGIN indudes /与/USER CODE END indudes */之间添加引用定义标准扩展整数类型的头文件代码:
代码段:
#include "stdint.h"

在" main h"的/* USER CODE BEGIN Private defines /与/ USER CODE END Private defines */之间添加全局变量"msg_ for. BH1750"与”BH1750 send定义的代码:
代码段:
typedef struct
{
uint8_t messageId;
char Data[5];
} msg_for_BH1750;
extern msg_for_BH1750 BH1750_send;

在"main.c"的/ * USER CODE BEGIN Includes * /与 / * USER CODE END Includes * /之间添加引用光敏传感器头文件的代码与BH1750数据的全局变量,并根据1.2.1章节步骤3中设计的数据码流,添加光敏传感器数据上报时携带messageld的代码:
代码段
#include "BH1750.h"
msg_for_BH1750 BH1750_send={02};

在”main.c"的/ * USER CODE BEGIN 0 */与/ *USER CODE END 0 */之间添加光敏传感器任务代码;定义光敏传感器任务名为"LightSensor. task" ,优先级为0;通过该任务,对光敏传感器进行初始化,并打印任务信息与光敏传感器数据:
代码段:
VOID LightSensor_task(VOID)
{
UINT32 uwRet = LOS_OK;
short int Data;
Init_BH1750();
while(1)
{
printf("This is LightSensor_task!\r\n");
Data = (int)Convert_BH1750();
printf("\r\n***********************BH1750 Value is %d\r\n", Data);
sprintf(BH1750_send.Data, "%5d", Data);
uwRet = LOS_TaskDelay(500);
if (uwRet != LOS_OK)
return;
}
}
UINT32 creat_LightSensor_task()
{
UINT32 uwRet = LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 0;
task_init_param.pcName = "LightSensor_task";
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)LightSensor_task;
task_init_param.uwStackSize = 0x800;
uwRet = LOS_TaskCreate(&g_TskHandle, &task_init_param);
if (LOS_OK != uwRet)
{
return uwRet;
}
return uwRet;
}

基于步骤3在”main.c"的/* USER CODE BEGIN 2 * / 与/* USER CODE END2 */之间生成的代码,添加创建光敏传感器任务的代码,并注释创建task1与task2的代码:
代码段:
UINT32 creat_data_send_task()
{
UINT32 uwRet = LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 1;
task_init_param.pcName = "data_send_task";
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)data_send_task;
task_init_param.uwStackSize = 0x400;
uwRet = LOS_TaskCreate(&g_TskHandle, &task_init_param);
if (uwRet != LOS_OK)
{
return uwRet;
}
return uwRet;
}

点击Rebuild,编译程序;

点击Download,下载程序至开发板;

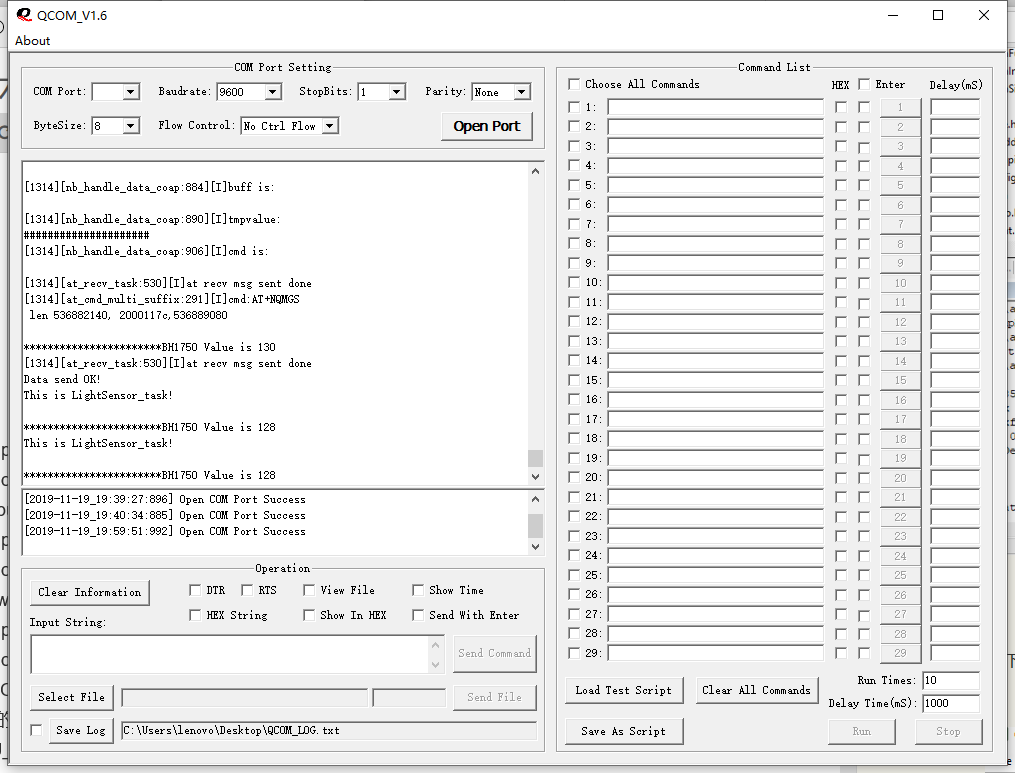
打开QCOM串口调试助手,根据对应的串口,选择对应的串口号,配置相应信息,按下"MCU_ RST",开发板运行程序;
此时在QCOM上可以看到任务打印的信息。

步骤二移植NB入网代码,通过NB模组将数据上报至平台
因为实验六与实验一有一定关系,因此我们不用新增项目,直接使用实验一的项目,但是需要将上学期的实验项目删除。(凡设备标识码变为数字的,都应删除,防止他人无法设备上线)
打开Keil,在Keil中右击"loT-Demo"选择”Manage Project Items.." ;
在"Project Items'标签下的"Aplcation/User"中添加"IoT Demo-LiteOSItargetslSrc"目录下的"at hal.c"文件(注: "at _hal.c" 文件包含用于连接LiteOS与HAL函数库控制外设的代码);

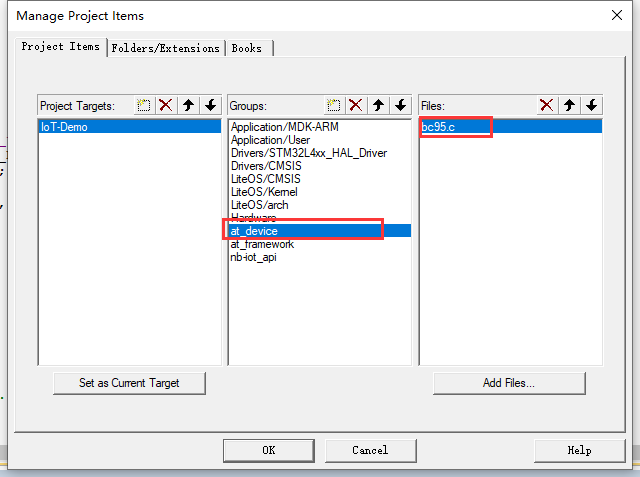
在"Project Items'标签下的"Groups"中添加"at_device", 并在该group下添加基于LiteOS 的NB 模组代码;添加”loT-Demo-LiteOS\components\net\at _device\ nb_bc95" 目录下的"bc95.c"文件;
在" Project items '标签下的"Groups"中添加"at_framework",并在该group下添加LiteOS AT框架实现的代码;添加"IoT-Demo-Lite0S\components\net\at_frame'" 目录下的全部.C文件:
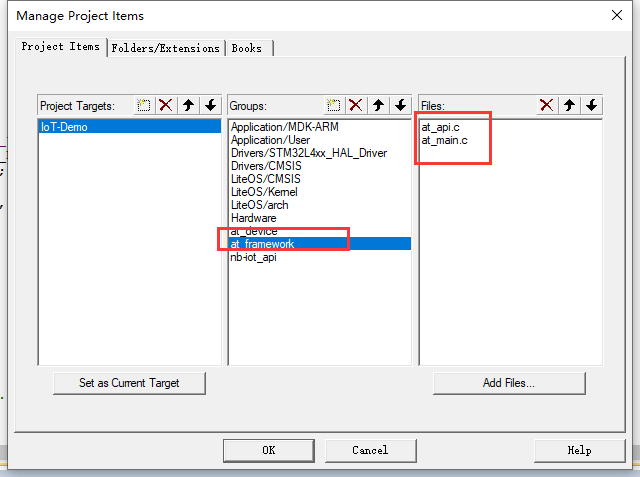
在" Project items '标签下的"Groups"中添加"nb-iot_api",并在该group下添加基于LiteOS的NB-Iot API的代码,
添加"IoT-Demo-Lite0S\components\connectivity\nb_iot'" 目录下的los_nb_api.C文件:

完成NB模组与AT框架相关代码添加,点击OK;
添加完成后,Keil的Project导航栏出现相应的文件;

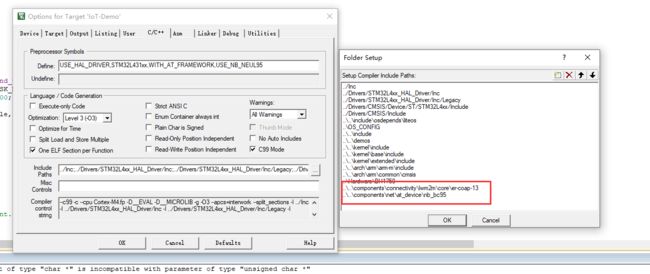
在"Option for Target 'loT-Demo'”界面下选择"C/C++”,在"Define" 中添加全局宏定义标识符: "WITH_ AT_ FRAMEWORK","USE_ NB_NEUL95";
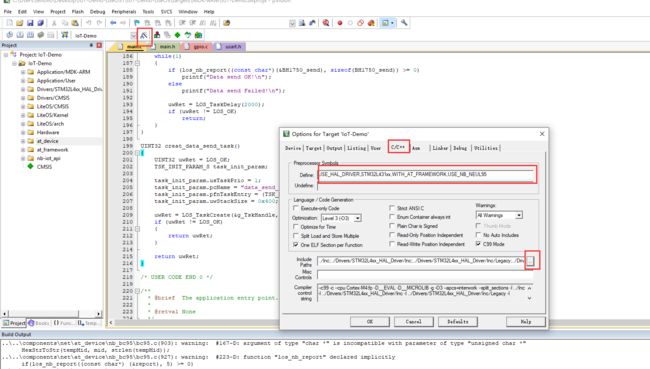
在"Include Paths"栏添加相应文件的头文件路径;头文件路径分别为:
"loT-Demo-LiteOS\components\connectivity\lwm2m\core\er-coap-13"
”IoT-Demo-LiteOS\components\net\at device\nb bc95"
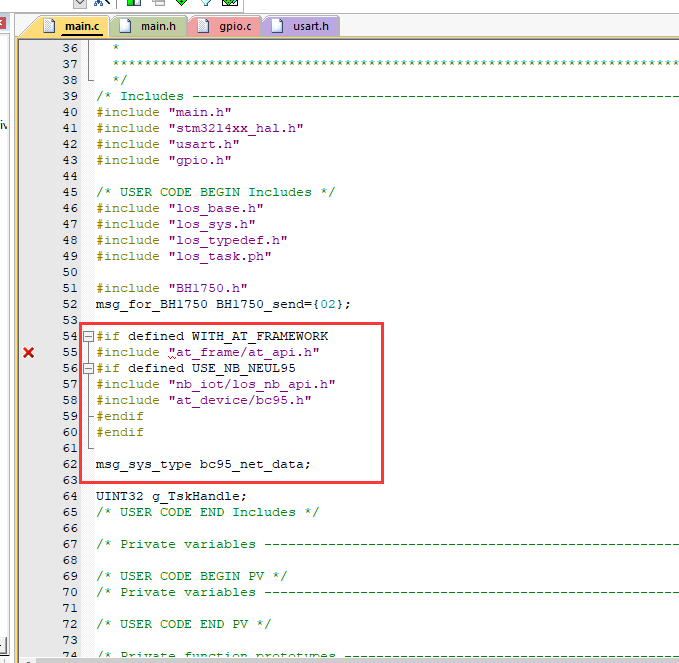
在main.c的/ * USER CODE BEGIN Icudes * /与/* USER CODE END Includes */之间添加调用AT框架与BC95头文件的代码,并声明BC95入网的全局变量;
代码段:
#if defined WITH_AT_FRAMEWORK
#include "at_frame/at_api.h"
#if defined USE_NB_NEUL95
#include "nb_iot/los_nb_api.h"
#include "at_device/bc95.h"
#endif
#endif
msg_sys_type bc95_net_data;
在"main h"的/* USER CODE BEGIN Private defines * / 与/* USER CODE END Private defines */之间添加”msg. sys_ type bc95_ net_ data' 定义的代码;
代码段:
typedef struct
{
char net_nmgr[30];
} msg_sys_type;
extern msg_sys_type bc95_net_data;

在"main.c"的/ * USER CODE BEGIN 0 * /与/ *USER CODE END 0“/之间添加BC95模组入网连接平台发送数据任务代码;定义该任务名为"data_send_task" ,优先级为1;通过该任务,MCU向BC9S发送平台ip及pont信息和光敏传感器数据并通过串口打印发送结果:
代码段:
VOID data_send_task(VOID)
{
UINT32 uwRet = LOS_OK;
los_nb_init((const int8_t*)"49.4.85.232", (const int8_t*)"5683", NULL);
los_nb_notify("+NNMI:", strlen("+NNMI:"), NULL, nb_cmd_match);
LOS_TaskDelay(3000);
while(1)
{
if (los_nb_report((const char*)(&BH1750_send), sizeof(BH1750_send)) >= 0)
printf("Data send OK!\n");
else
printf("Data send Failed!\n");
uwRet = LOS_TaskDelay(2000);
if (uwRet != LOS_OK)
return;
}
}
UINT32 creat_data_send_task()
{
UINT32 uwRet = LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 1;
task_init_param.pcName = "data_send_task";
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)data_send_task;
task_init_param.uwStackSize = 0x400;
uwRet = LOS_TaskCreate(&g_TskHandle, &task_init_param);
if (uwRet != LOS_OK)
{
return uwRet;
}
return uwRet;
}

打开' 'bc95.h”, 在该文件中修改AT _USART_PORT为2 (本 实验开发板MCU通过USART2向BC95模组发送数据,不同开发板根据实际硬件情况配置);


基于步骤1在"main.C" 的/* USER CODE BEGIN2 * /与/ * USER CODE END2 */之间生成的代码,添加创建BC95模组入网连接平台发送数据任务的代码;
代码段:
{
UINT32 uwRet = LOS_OK;
uwRet = LOS_KernelInit();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
// uwRet = creat_task1();
// if (uwRet != LOS_OK)
// {
// return LOS_NOK;
// }
//
// uwRet = creat_task2();
// if (uwRet != LOS_OK)
// {
// return LOS_NOK;
// }
uwRet = creat_LightSensor_task();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
uwRet = creat_data_send_task();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
LOS_Start();
}

点击Rebuild,编译程序;

点击Download,下载程序至开发板;

打开QCOM串口调试助手,根据对应的串口,选择对应的串口号,配置相应信息;通过跳线帽将开发板.上的UART1的RX和TX与CH340的TX和RX连接,将开发板上的UART2的RX和TX与NB-IoT的TX和RX连接;按下"MCU_ RST",开发板运行程序;此时在QCOM上可以看到任务打印的信息。
登陆平台,可以查看到注册的设备处于在线状态, 通过历史数据”可以查看到开发板上报的数据:
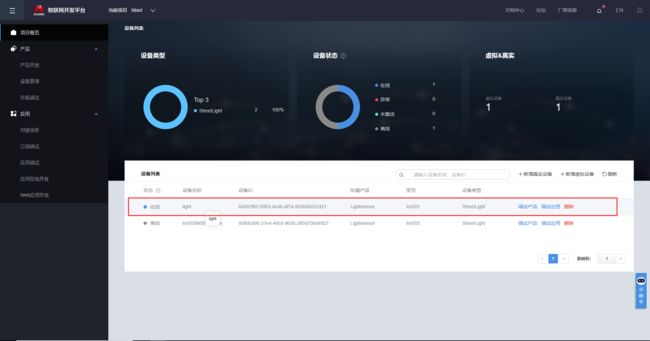

:
原理:

设备层:
实验一中所完成的Profile的设计,编解码插件开发,地址域的设置。均是为了区别多个消息,每个消息都有自己地址域。地址域为标识此消息的唯一的字段。这样做的原因是为了识别各种消息,同时保证每个消息具有正确性,提高了效率。通过地址域将设备层上报的消息实现解码,并将平台下发的命令进行反码,最终实现设备和平台之间的沟通。
平台层:
通过keil5 软件进行相应的代码设置,让设备能够与平台相互能够实现通信。
1、完成使能初始化
HAL_Init();
2、完成相应的设备的配置
参照实验六的实验步骤创建函数的形式,设置优先级完成实验的代码配置实现平台和设备的相互通信。
UINT32 creat_task1()
{
UINT32 uwRet=LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio=0;
task_init_param.pcName="task1";
task_init_param.pfnTaskEntry=(TSK_ENTRY_FUNC)task1;
task_init_param.uwStackSize=0x200;
uwRet=LOS_TaskCreate(&g_TskHandle,&task_init_param);
if(LOS_OK!=uwRet)
{
return uwRet;
}
return uwRet;
}
void task2(void)
{
int count=1;
while(1)
{
printf("this is task2,count is %d\r\n",count++);
LOS_TaskDelay(2000);
}
}
UINT32 creat_task2()
{
UINT32 uwRet=LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio=1;
task_init_param.pcName="task2";
task_init_param.pfnTaskEntry=(TSK_ENTRY_FUNC)task2;
task_init_param.uwStackSize=0x200;
uwRet=LOS_TaskCreate(&g_TskHandle,&task_init_param);
if(LOS_OK!=uwRet)
{
return uwRet;
}
return uwRet;
}
VOID LightSensor_task(VOID)
{
UINT32 uwRet=LOS_OK;
short int Data;
Init_BH1750();
while(1)
{
printf("This is LightSensor_task !\r\n");
Data=(int)Convert_BH1750();
printf("\r\n******************************BH1750 Value is %d\r\n",Data);
sprintf(BH1750_send.Data,"%5d",Data);
uwRet=LOS_TaskDelay(500);
if(uwRet!=LOS_OK)
return;
}
}
UINT32 creat_LightSensor_task()
{
UINT32 uwRet=LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio=0;
task_init_param.pcName="LightSensor_task";
task_init_param.pfnTaskEntry=(TSK_ENTRY_FUNC)LightSensor_task;
task_init_param.uwStackSize=0x800;
uwRet=LOS_TaskCreate(&g_TskHandle,&task_init_param);
if(LOS_OK!=uwRet)
{
return uwRet;
}
return uwRet;
}
网络层
具有多种接入方式和多协议的接入以及独有的IOT接入,使得不同厂商之间生产的各种不同的设备都可以通过网络层与平台实现相互通信。