- kube-scheduler 抢占机制
分享放大价值
kubernetes源码分析kuberneteskube-scheduler抢占
当pod调度失败后,会在PostFilter扩展点执行抢占流程,下面分析相关的代码实现抢占接口//PodNominatorabstractsoperationstomaintainnominatedPods.typePodNominatorinterface{//将pod加入抢占成功的node中AddNominatedPod(pod*PodInfo,nodeNamestring)//将pod从no
- ThinkSound V2版 - 一键给无声视频配音,为AI视频生成匹配音效 支持50系显卡 一键整合包下载
昨日之日2006
ai语音音视频人工智能
ThinkSound是阿里通义实验室开源的首个音频生成模型,它能够让AI像专业“音效师”一样,根据视频内容生成高度逼真、与视觉内容完美契合的音频。ThinkSound可直接应用于影视后期制作,为AI生成的视频自动匹配精准的环境噪音与爆炸声效;服务于游戏开发领域,实时生成雨势变化等动态场景的自适应音效;同时可以无障碍视频生产,为视障用户同步生成画面描述与环境音效。今天分享的ThinkSoundV2版
- flink自定义函数
逆风飞翔的小叔
flink入门到精通flink大数据bigdata
前言在很多情况下,尽管flink提供了丰富的转换算子API可供开发者对数据进行各自处理,比如map(),filter()等,但在实际使用的时候仍然不能满足所有的场景,这时候,就需要开发人员基于常用的转换算子的基础上,做一些自定义函数的处理1、来看一个常用的操作原始待读取的文件核心代码importorg.apache.flink.api.common.functions.FilterFunction
- 2025年UDP洪水攻击防护实战全解析:从T级流量清洗到AI智能防御
上海云盾商务经理杨杨
udp人工智能网络协议
一、2025年UDP洪水攻击的新特征AI驱动的自适应攻击攻击者利用生成式AI动态调整UDP报文特征(如载荷内容、发送频率),攻击流量与正常业务流量差异率低至0.5%,传统指纹过滤规则失效。反射放大攻击升级黑客通过劫持物联网设备(如摄像头、传感器)构建僵尸网络,利用DNS/NTP协议漏洞发起反射攻击,1Gbps请求可放大至50-500倍流量,峰值突破8Tbps。混合协议打击70%的UDP攻击伴随TC
- (一)OpenCV——噪声去除(降噪)
高斯滤波器(针对高斯噪声)高斯噪声是指它的概率密度函数服从高斯分布(即正态分布)的一类噪声。常见的高斯噪声包括起伏噪声、宇宙噪声、热噪声和散粒噪声等等。高斯滤波(Gaussianfilter)包含许多种,包括低通、带通和高通等,我们通常图像上说的高斯滤波,指的是高斯模糊(GaussianBlur),是一种高斯低通滤波,其过滤调图像高频成分(图像细节部分),保留图像低频成分(图像平滑区域),所以对图
- FFmpeg滤镜相关的重要结构体
melonbo
FFMPEGffmpeg
核心结构体概览FFmpeg滤镜系统由多个关键结构体组成,构成了完整的滤镜处理框架。以下是滤镜系统中最重要的结构体及其相互关系:AVFilterGraph┬─AVFilterContext┬─AVFilter│├─AVFilterLink│└─AVFilterPad└─AVFilterInOut详细结构体分析1.AVFilterGraph(滤镜图容器)功能:管理整个滤镜图的所有组件和状态重要成员:t
- wireshark分析以太网帧结构_TCP/IP详解卷1 - wireshark抓包分析
家庭影院
在初学TCP/IP协议时,会觉得协议是一种很抽象的东西,通过wireshark抓包分析各种协议,可以让抽象变得具体。wireshark抓包wireshar抓包的教程很多,这里就不再重复。参考下图:wireshark抓包wireshark快速get对应filter我们知道wireshark抓到的内容很多,要过滤我们需要的信息就需要设置对应的filter,例如:想要过滤ICMP协议相关的log,直接在
- 医疗金融预测与语音识别中的模型优化及可解释性技术突破
智能计算研究中心
其他
内容概要随着人工智能技术的纵深发展,模型优化与可解释性技术正在重塑医疗诊断、金融预测及语音识别领域的应用范式。在医疗领域,基于自适应学习的动态参数调整机制,结合迁移学习的跨场景知识复用,显著提升了疾病筛查模型的泛化能力;而金融预测场景中,联邦学习框架通过分布式数据协作,在保障隐私安全的前提下,实现了风险预测模型的多维度优化。语音识别领域则依托边缘计算架构,将模型压缩技术与实时推理引擎结合,有效解决
- 【常见滤波器】PCL 点云投影到拟合平面
X-Vision
《PCL算法案例开发》平面3dpcl计算机视觉算法点云
PCL点云投影到拟合平面-原理、实现与最佳实践目录平面投影的核心原理⚙️PCL平面投影架构基础平面投影实现高级投影技术与优化投影质量评估与分析️工程应用案例⚠️常见问题与解决方案可视化与调试平面投影的核心原理数学原理与几何概念点云投影到拟合平面是将三维点云数据降维到二维平面的过程,核心思想是正交投影:平面方程:ax+by+cz+d=0ax+by+cz+d=0ax+by+cz+d=0平面法向量:n=
- 【常见滤波器】PCL 模型滤波器
PCL模型滤波器-几何模型驱动的点云处理技术目录模型滤波器核心概念⚙️PCL模型滤波器架构基础模型滤波器实践高级模型滤波技术模型拟合精度优化️工业应用案例调试与可视化⚡️性能优化策略模型滤波器核心概念模型滤波的本质模型滤波器通过拟合几何模型并评估点云与模型的贴合度,实现对点云的过滤和处理。不同于基础的空间滤波器,模型滤波器能够识别并利用点云的底层几何结构信息。在阈值内超出阈值输入点云模型识别与拟合
- PCL | 体素滤波器pcl::VoxelGrid<>
Nines~
ROS算法ROSSLAMPCLC++
文章目录概述一、定义介绍二、功能作用三、使用示例源码:解释:概述 本节详细介绍pcl::VoxelGrid是PointCloudLibrary(PCL)中的一个常用滤波器,用于对点云数据进行体素栅格化(VoxelGridFiltering)。它将点云分割成一个个体素(voxel),并使用这些体素中的点计算出一个代表性的点,从而减少点云的数量,实现降采样的效果。二、功能作用降采样:在处理大规模点云
- PCL改进的体素滤波器
代码探险狂人
PCL
体素滤波是一种常用的点云数据处理方法,可以用于去除噪声、平滑点云数据以及进行体素化等操作。PCL(点云库)是一个广泛使用的开源库,提供了丰富的点云处理算法和工具。在本文中,我们将介绍如何改进PCL的体素滤波器,并提供相应的源代码。体素滤波器是一种基于体素网格的滤波方法,它将点云数据划分为规则的体素网格,并对每个体素内的点进行处理。传统的体素滤波器在去除噪声和平滑数据方面表现良好,但在一些特定场景下
- 安防监控漏报频发?陌讯实时检测算法实测召回率98%
2501_92487721
目标跟踪计算机视觉人工智能算法
一、开篇痛点:安防监控的检测难题在夜间低光、遮挡、小目标等复杂场景下,传统YOLO系列算法常出现漏检(FN)和误检(FP)。某安防厂商测试数据显示:当目标像素<50×50时,开源模型召回率骤降至65%以下。二、技术解析:陌讯算法的三重创新陌讯视觉算法通过多尺度特征融合+自适应光照补偿提升鲁棒性:动态感受野机制在Backbone中引入可变形卷积(DeformableConv),公式表示为:y(p)=
- 基于Vue3 + Element Plus项目实现el-table表格操作列自适应宽度组件
前言在实际的后台管理系统开发中,表格是最常用的数据展示组件之一。而表格的操作列(通常包含编辑、删除、查看等按钮)往往需要根据业务需求动态显示不同的按钮,这就带来了一个问题:如何让操作列的宽度能够自适应按钮的数量和内容长度?传统的解决方案是手动设置固定宽度,但这种方式存在以下问题:宽度设置过小,按钮可能会被挤压或换行宽度设置过大,会浪费表格空间按钮数量动态变化时,固定宽度无法适应本文将介绍如何基于V
- 基于MATLAB的语音信号预处理
3.1.语音信号的预加重处理对语音的的高频部分进行加重以去除口唇部分的影响,就必须要对输入的数字语音信号进行预加重处理,以此来增加语音的高频分辨率。通常通过传递函数为的一阶FIR高通数字滤波器来实现预加重,其中为预加重系数,0.9<<1.0。设n时刻的语音采样值为X(n),经过预加重处理的结果为,这里取=0.98。图3.1为该高通滤波器的幅频特性及相频特性。图3.2中分别给出了预加重前和预加重后的
- 万字长文带你搞懂yolov5和yolov8以及目标检测相关面试
起个别名
C++YOLO目标检测目标跟踪
一、与yoloV4相比,yoloV5的改进输入端:在模型训练阶段,使用了Mosaic数据增强、自适应锚框计算、自适应图片缩放基准网络:使用了FOCUS结构和CSP结构Neck网络:在Backbone和最后的Head输出层之间插入FPN_PAN结构Head输出层:训练时的损失函数GIOU_Loss,预测筛选框的DIOU_nms二、yolov5网络结构预处理在模型预处理阶段,使用了Mosaic数据增强
- 智能防御原理和架构
hao_wujing
安全
大家读完觉得有帮助记得关注和点赞!智能防御系统通过**AI驱动的动态感知、主动决策与自治响应**构建自适应防护体系,其核心在于将被动规则匹配升级为**预测性威胁狩猎**,实现对新型攻击(如AI生成的0day漏洞利用)的有效遏制。以下从原理、架构到技术实现进行体系化拆解:---###⚙️核心防御原理####1.**多模态威胁感知**-**跨域数据融合**:-网络层:DPI深度包检测(如Zeek解析T
- 【论文阅读】AdaCtrl: Towards Adaptive and Controllable Reasoning via Difficulty-Aware Budgeting
quintus0505
LLM论文阅读语言模型
AdaCtrl:TowardsAdaptiveandControllableReasoningviaDifficulty-AwareBudgeting3Method3.1长度触发标签作为控制接口(Length-TriggerTagsasControllingInterface)3.2冷启动微调(Cold-startfine-tuning)3.3难度感知的强化学习框架(Difficulty-awar
- Cesium功能集(四):自定义材质,添加带有方向的滚动路线-自适应缩放不变形
GIS肆月
Cesium功能集材质
自定义材质,添加带有方向的滚动路线-自适应缩放不变形1.材质定义PolylineImageTrailMaterialProperty.tsimport*asCesiumfrom'cesium';//流动线材质classPolylineImageTrailMaterialProperty{
- contentLengthFilterRegistrationBean导致SSE连接断开
好好的SSE代码复制到项目里直接发送消息可以,却无法异步发消息,经过痛苦的排查发现有人加了过滤器给所有请求加了Content-Length头,导致SSE连接中断,因为在SSE请求上强制添加Content-Length,浏览器会认为响应已经结束,导致后续数据无法接收。所以异步发送消息接收不到是因为连接已经断了。解决方案是在过滤器中识别SSE请求(通过Accept:text/event-stream头
- 微信小程序--顶部轮播图
wendyNo
小程序小程序
效果图市面是手机尺寸有很多,那如何让我们的轮播图根据手机来进行自适应呢?常见的手机尺寸:wxmlWXSS.banneritem{width:100%;}.banneritemimage{width:100%;}JSconstapp=getApp();varpage=1;Page({data:{bannerUrls:[//轮播图的图片{url:'/images/banner1.jpeg',linkU
- 从互联网电脑迁移Dify到内网部署Dify方法记录
一、在互联网电脑上准备迁移文件1.保存Docker镜像#获取所有Dify相关镜像(根据实际容器名调整)dockerps--filter"name=dify"--format"{{.Image}}"|sort-u>dify-images.list#保存镜像为.tar文件dockersave$(catdify-images.list)-odify-images.tar2.备份数据卷or直接复制路径(1
- 经典JS面试题——数组去重
MonsterQy
javascript前端开发语言
文章目录一、双指针二、filter方法三、includes四、indexOf五、reduce()六、set一、双指针基本思想:遍历数组,两层for循环比较元素是否相等,相等就删除重复元素。代码如下for(vari=0;i{returnarr.indexOf(value)==index})三、includes基本思想:利用includes方法去判断新声明的数组中是否已存在待操作的元素。vararr=
- 卷积神经网络架构的演进:从AlexNet到EfficientNet
t0_54manong
大数据与人工智能cnn架构人工智能个人开发
在过去的8.5年里,深度学习取得了飞速的进步。回溯到2012年,AlexNet在ImageNet上的Top-1准确率仅为63.3%,而如今,借助EfficientNet架构和师生训练法,我们已经能达到超过90%的准确率。本文将聚焦于卷积神经网络(CNN)架构的演变,深入探究其背后的基本原理。一些关键术语在深入了解各种架构之前,我们需要明确几个关键术语。更宽的网络意味着卷积层中有更多的特征图(滤波器
- 如何让AI真正理解你的意图(自适应Prompt实战指南)
nine是个工程师
大语言模型人工智能prompt
目前的LLM模型,在理解用户意图方面,正在使用自适应Prompt技术,来提升模型的理解能力。目前使用deepseek推理模型能明显看到自适应的一个过程。前言:为什么你的AI总是"答非所问"?相信很多人都遇到过这样的情况:你问:“帮我写一个Python爬虫”AI答:给你一堆理论知识和完整教程(你只想要简单代码)你问:“推荐一部电影”AI答:推荐了《教父》(你想看轻松喜剧)你问:“解释一下机器学习”A
- 为什么MySQL怕排序,Redis ZSet却秒杀?跳表+亿级数据的架构暴力美学
某证券交易所实时股价排序系统突发故障:处理10万支股票的排序请求从毫秒级飙升到12秒。事后发现ZSet元素数量突破阈值后,底层结构未能从listpack切换到跳表,导致性能断崖式下跌。这个千万级损失的案例揭示了ZSet底层实现的关键性。一、ZSet双引擎架构:自适应存储的艺术1.小数据高效存储:listpack(Redis7.0+)//listpack内存结构示例[总字节数][元素数量][元素1]
- ReactNative【实战】瀑布流布局列表(含图片自适应、点亮红心动画)
最终效果滚动到最底部实现原理使用绝对定位实现交错衔接图片自适应布局代码范例数据类型typings.d.tstypeArticleSimple={id:number;title:string;userName:string;avatarUrl:string;favoriteCount:number;isFavorite:boolean;image:string;};模拟数据mock/articleL
- JavaWeb三大组件啊-Filter
sleepcattt
filterjava
一、Filter过滤器简介过滤器可以对访问的静态资源和动态资源进行过滤,既可以过滤请求,也可以过滤响应1.应用场景列举统一编码处理登入验证敏感字符过滤![[Pastedimage20250422121326.png]]相当于在Client和Server之间创建了一个中间层Filter,先经过Filter再到Server2.使用先创建实现类,来实现javax.servlet.Filter包的接口,实
- Java JNDI LDAP的Filter查询 条件查询 通配符
---------------------------------------------------------------------------------------------------------------------------------逻辑运算符:&逻辑与|逻辑或!逻辑非-----------------------------------------------------
- SIGMOD论文解读|在自下而上优化中添加布隆过滤器
Gauss松鼠会
技术交流数据库gaussdbdatabase
6月22日至27日,2025ACMSIGMOD/PODS国际学术会议在德国柏林举行。25日,华为多伦多分布式调度和数据引擎实验室主任工程师TimothyZeyl受邀出席,就入选的《IncludingBloomFiltersinBottom-upOptimization》论文进行了解读该论文创新性地首次提出了在自下而上的优化器的基于成本的优化过程中添加布隆过滤器(BloomFilter)的技术。该技
- 微信开发者验证接口开发
362217990
微信 开发者 token 验证
微信开发者接口验证。
Token,自己随便定义,与微信填写一致就可以了。
根据微信接入指南描述 http://mp.weixin.qq.com/wiki/17/2d4265491f12608cd170a95559800f2d.html
第一步:填写服务器配置
第二步:验证服务器地址的有效性
第三步:依据接口文档实现业务逻辑
这里主要讲第二步验证服务器有效性。
建一个
- 一个小编程题-类似约瑟夫环问题
BrokenDreams
编程
今天群友出了一题:
一个数列,把第一个元素删除,然后把第二个元素放到数列的最后,依次操作下去,直到把数列中所有的数都删除,要求依次打印出这个过程中删除的数。
&
- linux复习笔记之bash shell (5) 关于减号-的作用
eksliang
linux关于减号“-”的含义linux关于减号“-”的用途linux关于“-”的含义linux关于减号的含义
转载请出自出处:
http://eksliang.iteye.com/blog/2105677
管道命令在bash的连续处理程序中是相当重要的,尤其在使用到前一个命令的studout(标准输出)作为这次的stdin(标准输入)时,就显得太重要了,某些命令需要用到文件名,例如上篇文档的的切割命令(split)、还有
- Unix(3)
18289753290
unix ksh
1)若该变量需要在其他子进程执行,则可用"$变量名称"或${变量}累加内容
什么是子进程?在我目前这个shell情况下,去打开一个新的shell,新的那个shell就是子进程。一般状态下,父进程的自定义变量是无法在子进程内使用的,但通过export将变量变成环境变量后就能够在子进程里面应用了。
2)条件判断: &&代表and ||代表or&nbs
- 关于ListView中性能优化中图片加载问题
酷的飞上天空
ListView
ListView的性能优化网上很多信息,但是涉及到异步加载图片问题就会出现问题。
具体参看上篇文章http://314858770.iteye.com/admin/blogs/1217594
如果每次都重新inflate一个新的View出来肯定会造成性能损失严重,可能会出现listview滚动是很卡的情况,还会出现内存溢出。
现在想出一个方法就是每次都添加一个标识,然后设置图
- 德国总理默多克:给国人的一堂“震撼教育”课
永夜-极光
教育
http://bbs.voc.com.cn/topic-2443617-1-1.html德国总理默多克:给国人的一堂“震撼教育”课
安吉拉—默克尔,一位经历过社会主义的东德人,她利用自己的博客,发表一番来华前的谈话,该说的话,都在上面说了,全世界想看想传播——去看看默克尔总理的博客吧!
德国总理默克尔以她的低调、朴素、谦和、平易近人等品格给国人留下了深刻印象。她以实际行动为中国人上了一堂
- 关于Java继承的一个小问题。。。
随便小屋
java
今天看Java 编程思想的时候遇见一个问题,运行的结果和自己想想的完全不一样。先把代码贴出来!
//CanFight接口
interface Canfight {
void fight();
}
//ActionCharacter类
class ActionCharacter {
public void fight() {
System.out.pr
- 23种基本的设计模式
aijuans
设计模式
Abstract Factory:提供一个创建一系列相关或相互依赖对象的接口,而无需指定它们具体的类。 Adapter:将一个类的接口转换成客户希望的另外一个接口。A d a p t e r模式使得原本由于接口不兼容而不能一起工作的那些类可以一起工作。 Bridge:将抽象部分与它的实现部分分离,使它们都可以独立地变化。 Builder:将一个复杂对象的构建与它的表示分离,使得同
- 《周鸿祎自述:我的互联网方法论》读书笔记
aoyouzi
读书笔记
从用户的角度来看,能解决问题的产品才是好产品,能方便/快速地解决问题的产品,就是一流产品.
商业模式不是赚钱模式
一款产品免费获得海量用户后,它的边际成本趋于0,然后再通过广告或者增值服务的方式赚钱,实际上就是创造了新的价值链.
商业模式的基础是用户,木有用户,任何商业模式都是浮云.商业模式的核心是产品,本质是通过产品为用户创造价值.
商业模式还包括寻找需求
- JavaScript动态改变样式访问技术
百合不是茶
JavaScriptstyle属性ClassName属性
一:style属性
格式:
HTML元素.style.样式属性="值";
创建菜单:在html标签中创建 或者 在head标签中用数组创建
<html>
<head>
<title>style改变样式</title>
</head>
&l
- jQuery的deferred对象详解
bijian1013
jquerydeferred对象
jQuery的开发速度很快,几乎每半年一个大版本,每两个月一个小版本。
每个版本都会引入一些新功能,从jQuery 1.5.0版本开始引入的一个新功能----deferred对象。
&nb
- 淘宝开放平台TOP
Bill_chen
C++c物流C#
淘宝网开放平台首页:http://open.taobao.com/
淘宝开放平台是淘宝TOP团队的产品,TOP即TaoBao Open Platform,
是淘宝合作伙伴开发、发布、交易其服务的平台。
支撑TOP的三条主线为:
1.开放数据和业务流程
* 以API数据形式开放商品、交易、物流等业务;
&
- 【大型网站架构一】大型网站架构概述
bit1129
网站架构
大型互联网特点
面对海量用户、海量数据
大型互联网架构的关键指标
高并发
高性能
高可用
高可扩展性
线性伸缩性
安全性
大型互联网技术要点
前端优化
CDN缓存
反向代理
KV缓存
消息系统
分布式存储
NoSQL数据库
搜索
监控
安全
想到的问题:
1.对于订单系统这种事务型系统,如
- eclipse插件hibernate tools安装
白糖_
Hibernate
eclipse helios(3.6)版
1.启动eclipse 2.选择 Help > Install New Software...> 3.添加如下地址:
http://download.jboss.org/jbosstools/updates/stable/helios/ 4.选择性安装:hibernate tools在All Jboss tool
- Jquery easyui Form表单提交注意事项
bozch
jquery easyui
jquery easyui对表单的提交进行了封装,提交的方式采用的是ajax的方式,在开发的时候应该注意的事项如下:
1、在定义form标签的时候,要将method属性设置成post或者get,特别是进行大字段的文本信息提交的时候,要将method设置成post方式提交,否则页面会抛出跨域访问等异常。所以这个要
- Trie tree(字典树)的Java实现及其应用-统计以某字符串为前缀的单词的数量
bylijinnan
java实现
import java.util.LinkedList;
public class CaseInsensitiveTrie {
/**
字典树的Java实现。实现了插入、查询以及深度优先遍历。
Trie tree's java implementation.(Insert,Search,DFS)
Problem Description
Igna
- html css 鼠标形状样式汇总
chenbowen00
htmlcss
css鼠标手型cursor中hand与pointer
Example:CSS鼠标手型效果 <a href="#" style="cursor:hand">CSS鼠标手型效果</a><br/>
Example:CSS鼠标手型效果 <a href="#" style=&qu
- [IT与投资]IT投资的几个原则
comsci
it
无论是想在电商,软件,硬件还是互联网领域投资,都需要大量资金,虽然各个国家政府在媒体上都给予大家承诺,既要让市场的流动性宽松,又要保持经济的高速增长....但是,事实上,整个市场和社会对于真正的资金投入是非常渴望的,也就是说,表面上看起来,市场很活跃,但是投入的资金并不是很充足的......
- oracle with语句详解
daizj
oraclewithwith as
oracle with语句详解 转
在oracle中,select 查询语句,可以使用with,就是一个子查询,oracle 会把子查询的结果放到临时表中,可以反复使用
例子:注意,这是sql语句,不是pl/sql语句, 可以直接放到jdbc执行的
----------------------------------------------------------------
- hbase的简单操作
deng520159
数据库hbase
近期公司用hbase来存储日志,然后再来分析 ,把hbase开发经常要用的命令找了出来.
用ssh登陆安装hbase那台linux后
用hbase shell进行hbase命令控制台!
表的管理
1)查看有哪些表
hbase(main)> list
2)创建表
# 语法:create <table>, {NAME => <family&g
- C语言scanf继续学习、算术运算符学习和逻辑运算符
dcj3sjt126com
c
/*
2013年3月11日20:37:32
地点:北京潘家园
功能:完成用户格式化输入多个值
目的:学习scanf函数的使用
*/
# include <stdio.h>
int main(void)
{
int i, j, k;
printf("please input three number:\n"); //提示用
- 2015越来越好
dcj3sjt126com
歌曲
越来越好
房子大了电话小了 感觉越来越好
假期多了收入高了 工作越来越好
商品精了价格活了 心情越来越好
天更蓝了水更清了 环境越来越好
活得有奔头人会步步高
想做到你要努力去做到
幸福的笑容天天挂眉梢 越来越好
婆媳和了家庭暖了 生活越来越好
孩子高了懂事多了 学习越来越好
朋友多了心相通了 大家越来越好
道路宽了心气顺了 日子越来越好
活的有精神人就不显
- java.sql.SQLException: Value '0000-00-00' can not be represented as java.sql.Tim
feiteyizu
mysql
数据表中有记录的time字段(属性为timestamp)其值为:“0000-00-00 00:00:00”
程序使用select 语句从中取数据时出现以下异常:
java.sql.SQLException:Value '0000-00-00' can not be represented as java.sql.Date
java.sql.SQLException: Valu
- Ehcache(07)——Ehcache对并发的支持
234390216
并发ehcache锁ReadLockWriteLock
Ehcache对并发的支持
在高并发的情况下,使用Ehcache缓存时,由于并发的读与写,我们读的数据有可能是错误的,我们写的数据也有可能意外的被覆盖。所幸的是Ehcache为我们提供了针对于缓存元素Key的Read(读)、Write(写)锁。当一个线程获取了某一Key的Read锁之后,其它线程获取针对于同
- mysql中blob,text字段的合成索引
jackyrong
mysql
在mysql中,原来有一个叫合成索引的,可以提高blob,text字段的效率性能,
但只能用在精确查询,核心是增加一个列,然后可以用md5进行散列,用散列值查找
则速度快
比如:
create table abc(id varchar(10),context blog,hash_value varchar(40));
insert into abc(1,rep
- 逻辑运算与移位运算
latty
位运算逻辑运算
源码:正数的补码与原码相同例+7 源码:00000111 补码 :00000111 (用8位二进制表示一个数)
负数的补码:
符号位为1,其余位为该数绝对值的原码按位取反;然后整个数加1。 -7 源码: 10000111 ,其绝对值为00000111 取反加一:11111001 为-7补码
已知一个数的补码,求原码的操作分两种情况:
- 利用XSD 验证XML文件
newerdragon
javaxmlxsd
XSD文件 (XML Schema 语言也称作 XML Schema 定义(XML Schema Definition,XSD)。 具体使用方法和定义请参看:
http://www.w3school.com.cn/schema/index.asp
java自jdk1.5以上新增了SchemaFactory类 可以实现对XSD验证的支持,使用起来也很方便。
以下代码可用在J
- 搭建 CentOS 6 服务器(12) - Samba
rensanning
centos
(1)安装
# yum -y install samba
Installed:
samba.i686 0:3.6.9-169.el6_5
# pdbedit -a rensn
new password:123456
retype new password:123456
……
(2)Home文件夹
# mkdir /etc
- Learn Nodejs 01
toknowme
nodejs
(1)下载nodejs
https://nodejs.org/download/ 选择相应的版本进行下载 (2)安装nodejs 安装的方式比较多,请baidu下
我这边下载的是“node-v0.12.7-linux-x64.tar.gz”这个版本 (1)上传服务器 (2)解压 tar -zxvf node-v0.12.
- jquery控制自动刷新的代码举例
xp9802
jquery
1、html内容部分 复制代码代码示例: <div id='log_reload'>
<select name="id_s" size="1">
<option value='2'>-2s-</option>
<option value='3'>-3s-</option
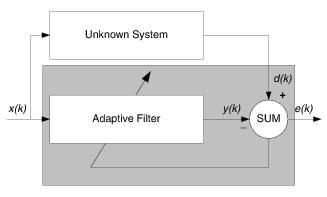
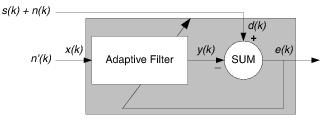
 和干扰噪声
和干扰噪声  之和
之和
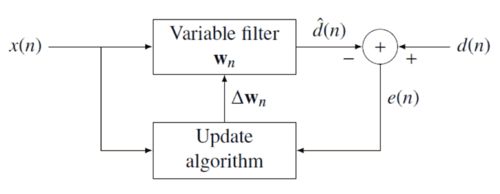
 阶滤波器的系数定义为
阶滤波器的系数定义为![\mathbf{w}_{n}=\left[w_{n}(0),\,w_{n}(1),\, ...,\,w_{n}(p)\right]^{T}](http://img.e-com-net.com/image/info8/9b0b23a76e274e6b9a7413d4b8044e84.png) .
.


![\mathbf{x}(n)=\left[x(n),\,x(n-1),\,...,\,x(n-p)\right]^{T}](http://img.e-com-net.com/image/info8/b80c61c4768549e3b45e11630b8d309a.png)

 是滤波器系数的校正因子。
是滤波器系数的校正因子。