OPENCV2计算机视觉编程手册-第九章估算图像间的投影关系
1、计算一对图像的基础矩阵
#include输入图像:


输出图像:

2、使用随机采样一致算法(RANSAC)进行图像匹配
1.什么是RANSAC?
RANSAC是RANdom Sample Consensus(随机采样一致性)的缩写。它是从一个观察数据集合中,估计模型参数(模型拟合)的迭代方法。它是一种随机的不确定算法,每次运算求出的结果可能不相同,但总能给出一个合理的结果,为了提高概率必须提高迭代次数。
2.算法详解
给定两个点p1与p2的坐标,确定这两点所构成的直线,要求对于输入的任意点p3,都可以判断它是否在该直线上。初中解析几何知识告诉我们,判断一个点在直线上,只需其与直线上任意两点点斜率都相同即可。实际操作当中,往往会先根据已知的两点算出直线的表达式(点斜式、截距式等等),然后通过向量计算即可方便地判断p3是否在该直线上。
生产实践中的数据往往会有一定的偏差。例如我们知道两个变量X与Y之间呈线性关系,Y=aX+b,我们想确定参数a与b的具体值。通过实验,可以得到一组X与Y的测试值。虽然理论上两个未知数的方程只需要两组值即可确认,但由于系统误差的原因,任意取两点算出的a与b的值都不尽相同。我们希望的是,最后计算得出的理论模型与测试值的误差最小。大学的高等数学课程中,详细阐述了最小二乘法的思想。通过计算最小均方差关于参数a、b的偏导数为零时的值。事实上,在很多情况下,最小二乘法都是线性回归的代名词。
遗憾的是,最小二乘法只适合与误差较小的情况。试想一下这种情况,假使需要从一个噪音较大的数据集中提取模型(比方说只有20%的数据时符合模型的)时,最小二乘法就显得力不从心了。例如下图,肉眼可以很轻易地看出一条直线(模式),但算法却找错了。
RANSAC算法的输入是一组观测数据(往往含有较大的噪声或无效点),一个用于解释观测数据的参数化模型以及一些可信的参数。RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
然后,用所有假设的局内点去重新估计模型(譬如使用最小二乘法),因为它仅仅被初始的假设局内点估计过。
最后,通过估计局内点与模型的错误率来评估模型。
上述过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。
#include测试失败:
“System.AccessViolationException”类型的未经处理的异常出现在 RANSAC进行图像匹配.exe 中。
其他信息: 尝试读取或写入受保护的内存。这通常指示其他内存已损坏。
3、计算两幅图之间的单应矩阵
单应性矩阵:
描述的是共面点在两个相机视图下的像素点的约束关系,描述的是点与点之间的约束关系,使用单应矩阵可以找到像点在另一幅图像上对应点的确切位置。
即当已知两幅图像间的单应性矩阵H时,可以通过计算对应像素点的坐标。
特殊情况1:当相机只纯旋转,不平移时,即使不共面,也可以使用单应性来描述,因为此时基础矩阵F为0。
特殊情况2:当相机的平移距离相对于场景的深度较小的时候,也可以使用单应矩阵H来描述约束关系。
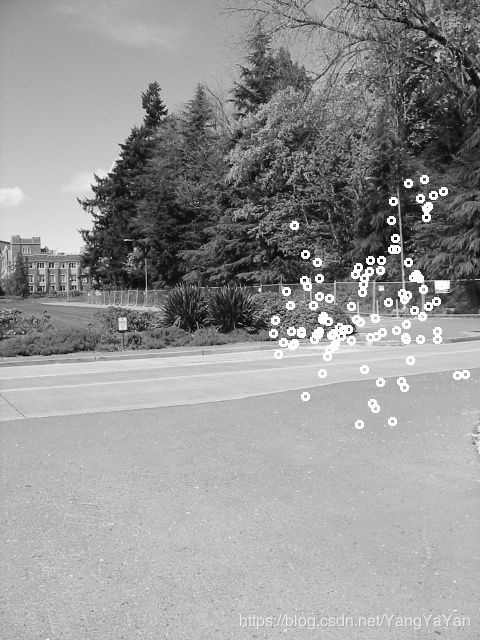
#include输入图像:


输出图像:
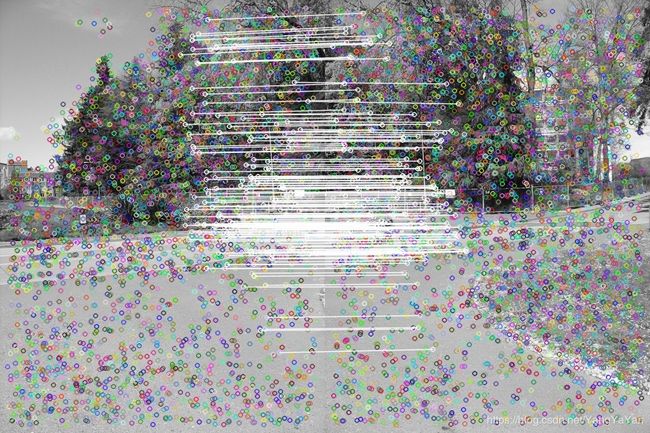


!!!最后一幅图像不对,不知道什么原因。