最速下降方法与Newton方法
文章目录
- 最速下降方法
- Euclid范数和二次范数
- Euclid范数
- 二次范数
- 基于坐标变换的解释
- 采用$\ell_1$-范数的最速下降方向
- 数值试验
- Newton 方法
- Newton 步径
- 二阶近似的最优解
- 线性化最优性条件的解
- Newton 步径的仿射不变性
- Newton 减量
- Newton 方法
- 收敛性分析
- 数值实验
- 代码
《Convex Optimization》
最速下降方法
f ( x + v ) f(x+v) f(x+v)在 v = 0 v=0 v=0处的一阶泰勒展开为:
f ( x + v ) ≈ f ^ ( x + v ) = f ( x ) + ∇ f ( x ) T v f(x+v)\approx \hat{f}(x+v) = f(x) + \nabla f(x)^{T}v f(x+v)≈f^(x+v)=f(x)+∇f(x)Tv
∇ f ( x ) T v \nabla f(x)^{T}v ∇f(x)Tv是 f f f在 x x x处沿 v v v的方向导数。它近似给出了 f f f沿小的步径 v v v会发生的变化。
在 v v v的大小固定的前提下,讨论如何选择 v v v使得方向导数最小是有意义的,即:
Δ x n s d = a r g m i n { ∇ f ( x ) T v ∣ ∥ v ∥ = 1 } \Delta x_{nsd}= argmin\{\nabla f(x)^{T}v \:|\: \|v\|=1\} Δxnsd=argmin{∇f(x)Tv∣∥v∥=1}
最速下降方向就是一个使 f f f的线性近似下降最多的具有单位范数的步径。注意,这里的单位范数,并不局限于Euclid范数。
我们先给出最速下降方法的算法,再介绍几种范数约束。

Euclid范数和二次范数
Euclid范数
显然,这时的方向就是负梯度方向。
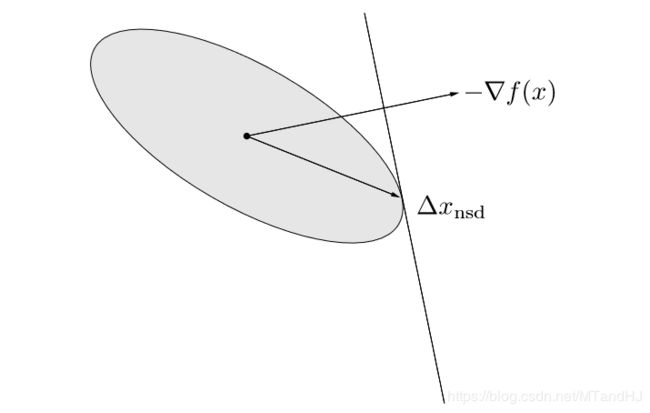
二次范数
我们考虑二次范数
∥ z ∥ P = ( z T P z ) 1 / 2 = ∥ P 1 / 2 z ∥ \|z\|_P=(z^TPz)^{1/2}=\|P^{1/2}z\| ∥z∥P=(zTPz)1/2=∥P1/2z∥
其中P为n阶对称正定矩阵。
这时的最优解为:
Δ x n s d = − ( ∇ f ( x ) T P − 1 ∇ f ( x ) ) − 1 / 2 P − 1 ∇ f ( x ) \Delta x_{nsd}=-(\nabla f(x)^{T}P^{-1}\nabla f(x))^{-1/2}P^{-1}\nabla f(x) Δxnsd=−(∇f(x)TP−1∇f(x))−1/2P−1∇f(x)
这个最优解,可以通过引入拉格朗日乘子,求解对偶函数KKT条件获得,并不难,就不写了。
基于坐标变换的解释
二次范数,可以从坐标变换的角度给出一个解释。
我们定义线性变换:
u ˉ = P 1 / 2 u \bar{u}=P^{1/2}u uˉ=P1/2u
那么:
g ( u ˉ ) = f ( P − 1 / 2 u ˉ ) = f ( u ) g(\bar{u})=f(P^{-1/2}\bar{u})=f(u) g(uˉ)=f(P−1/2uˉ)=f(u)
g g g在 x ˉ \bar{x} xˉ出的负梯度方向为:
Δ x ˉ = − ∇ f ˉ ( x ˉ ) = − P − 1 / 2 ∇ f ( P − 1 / 2 x ˉ ) = − P − 1 / 2 ∇ f ( x ) \Delta \bar{x}=-\nabla \bar{f}(\bar{x})=-P^{-1/2}\nabla f(P^{-1/2}\bar{x})=-P^{-1/2}\nabla f(x) Δxˉ=−∇fˉ(xˉ)=−P−1/2∇f(P−1/2xˉ)=−P−1/2∇f(x)
注意,并没有归一化。
又,我们已经知道 Δ x = − P − 1 ∇ f ( x ) \Delta x = -P^{-1} \nabla f(x) Δx=−P−1∇f(x)(只是方向而已),所以:
Δ x ˉ = P 1 / 2 Δ x \Delta \bar{x}=P^{1/2}\Delta x Δxˉ=P1/2Δx
同样的线性变换。换言之,二次范数 ∥ ⋅ ∥ P \|\cdot\|_P ∥⋅∥P下的最速下降方向可以理解为对原问题进行坐标变换 x ˉ = P 1 / 2 x \bar{x}=P^{1/2}x xˉ=P1/2x后的梯度方向。辅以下图便于理解。
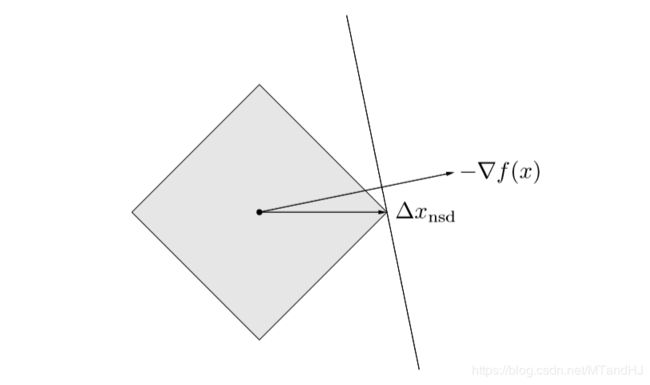
采用 ℓ 1 \ell_1 ℓ1-范数的最速下降方向
这个问题的刻画如下:
Δ x n s d = a r g m i n { ∇ f ( x ) T v ∣ ∥ v ∥ 1 = 1 } \Delta x_{nsd}=argmin\{\nabla f(x)^Tv \: | \: \|v\|_1=1\} Δxnsd=argmin{∇f(x)Tv∣∥v∥1=1}
ℓ 1 \ell_1 ℓ1即各分量绝对值之和,所以,只需把 ∇ f ( x ) \nabla f(x) ∇f(x)绝对值分量最大的那个部分找出来即可。不妨设,第 i i i个分量就是我们要找的,那么:
Δ x n s d = − s i g n ( ∂ f ( x ) ∂ x i ) e i \Delta x_{nsd}=-sign(\frac{\partial f(x)}{\partial x_i})e_i Δxnsd=−sign(∂xi∂f(x))ei
其中, e i e_i ei表示第 i i i个基向量。
所以,在每次下降过程中,都只是改变一个分量,所以 ℓ 1 \ell_1 ℓ1-范数的下降,也称为坐标下降算法。
辅以下图以便理解:
至于收敛性分析,与先前的相反,我们不在这里给出(打起来太麻烦了实际上,有需求直接翻书就好了)。
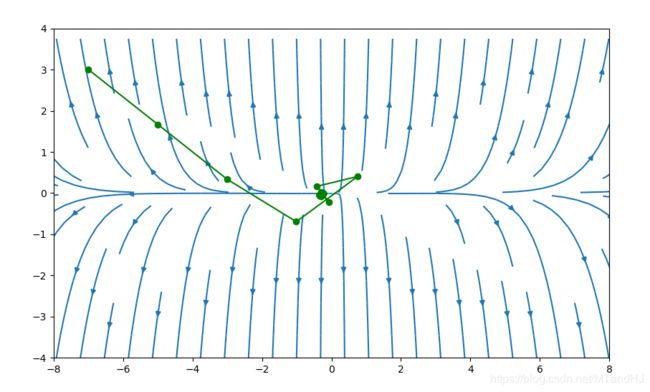
数值试验
我们依然选择 f ( x ) = e x 1 + 3 x 2 − 0.1 + e x 1 − 3 x 2 − 0.1 + e − x 1 − 0.1 f(x)=e^{x_1+3x_2-0.1}+e^{x_1-3x_2-0.1}+e^{-x_1-0.1} f(x)=ex1+3x2−0.1+ex1−3x2−0.1+e−x1−0.1, α = 0.2 , β = 0.7 \alpha=0.2,\beta=0.7 α=0.2,β=0.7,初始点为 ( 7 , 3 ) (7, 3) (7,3),下图为我们展示了一种较为极端的坐标下降的方式。

代码只需要改变gradient2的几行而已。
def gradient2(x):
x0 = x[0]
x1 = x[1]
grad1 = np.exp(x0+3*x1-0.1) \
+ np.exp(x0-3*x1-0.3) \
- np.exp(-x0-0.1)
grad2 = 3 * np.exp(x0+3*x1-0.1) \
-3 * np.exp(x0-3*x1-0.3)
if abs(grad1) > abs(grad2):
return np.array([grad1/abs(grad1),0])
else:
return np.array([0, grad2/abs(grad2)])
Newton 方法
最开始看的时候,还很疑惑,后来才发现,原来这个方法在很多地方都出现过。除了《凸优化》(《Convex Optimization》),数学分析(华师大)和托马斯微积分都讲到过。虽然,或者将的一元的特殊情况,而且,后者的问题是寻找函数的零值点。起初,还不知道怎么把俩者联系起来,仔细一想,导函数的零值点不就是我们所要的吗?当然,得要求函数是凸的。
实际上,Newton方法是一种特殊的二次范数方法。特殊在, P P P的选取为Hessian矩阵 ∇ 2 f ( x ) 。 \nabla^2 f(x)。 ∇2f(x)。我们还没有分析,二次范数的 P P P应该如何选择。在下降方法的收敛性分析中,我们强调了条件数的重要性。加上刚刚分析过的坐标变换,坐标变换后,新的Hessian矩阵变为:
P − 1 / 2 ∇ 2 f ( x ) P − 1 / 2 P^{-1/2}\nabla^2 f(x)P^{-1/2} P−1/2∇2f(x)P−1/2
所以,如果我们取 P = ∇ 2 f ( x ∗ ) P =\nabla^2f(x^*) P=∇2f(x∗),那么新的Hessian矩阵在最有点附近就近似为 I I I,这样就能保证快速收敛。如果,每次都能选择 P = ∇ 2 f ( x ) P=\nabla^2 f(x) P=∇2f(x),这就是Newton方法了。下图反映了为什么这么选择会加速收敛:
Newton 步径
Newton步径:
Δ x n t = − ∇ 2 f ( x ) − 1 ∇ f ( x ) \Delta x_{nt}=-\nabla^2 f(x)^{-1}\nabla f(x) Δxnt=−∇2f(x)−1∇f(x)
则:
∇ f ( x ) T Δ x n t = − ∇ f ( x ) T ∇ 2 f ( x ) − 1 ∇ f ( x ) < 0 \nabla f(x)^T\Delta x_{nt}=-\nabla f(x)^T\nabla^2f(x)^{-1}\nabla f(x)<0 ∇f(x)TΔxnt=−∇f(x)T∇2f(x)−1∇f(x)<0
因为我们假设Hessian矩阵正定,所以上述不等式在 ∇ f ( x ) ≠ 0 \nabla f(x) \ne 0 ∇f(x)̸=0时都成立。
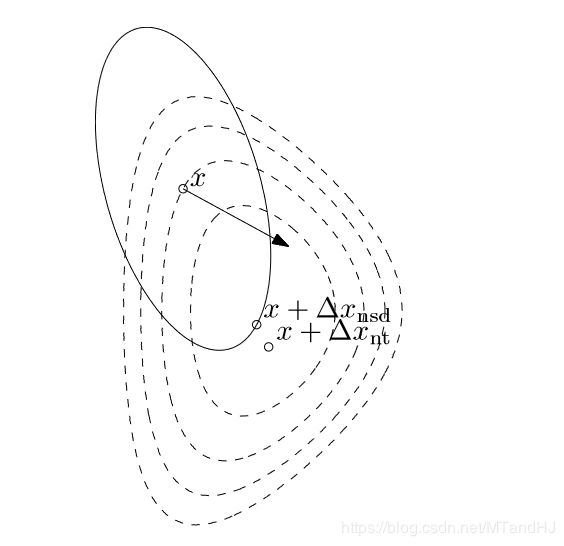
二阶近似的最优解
f ( x + v ) f(x+v) f(x+v)在 v = 0 v=0 v=0处的二阶近似为:
f ^ ( x + v ) = f ( x ) + ∇ f ( x ) T v + 1 2 v T ∇ 2 f ( x ) v \hat{f}(x+v)=f(x)+\nabla f(x)^Tv+\frac{1}{2}v^T \nabla^2f(x)v f^(x+v)=f(x)+∇f(x)Tv+21vT∇2f(x)v
这是 v v v的二次凸函数,在 v = Δ x n t v=\Delta x_{nt} v=Δxnt处到达最小值。下图即是该性质的一种形象地刻画:

线性化最优性条件的解
如果我们在 x x x附近对最优性条件 ∇ f ( x ∗ ) = 0 \nabla f(x^*)=0 ∇f(x∗)=0处进行线性化,可以得到:
∇ f ( x + v ) ≈ ∇ f ( x ) + ∇ 2 f ( x ) v = 0 \nabla f(x+v) \approx \nabla f(x) + \nabla^2 f(x) v=0 ∇f(x+v)≈∇f(x)+∇2f(x)v=0
这个实际上就是我在最开始对Newton方法的一个解释。不多赘述。
Newton 步径的仿射不变性

这个在代数里面是不是叫做同构?
Newton 减量
我们将
λ ( x ) = ( ∇ f ( x ) T ∇ 2 f ( x ) − 1 ∇ f ( x ) ) 1 / 2 \lambda (x)=(\nabla f(x)^T \nabla^2 f(x)^{-1}\nabla f(x))^{1/2} λ(x)=(∇f(x)T∇2f(x)−1∇f(x))1/2
称为Newton减量。
有如下的性质:
f ( x ) = i n f y f ^ ( y ) = f ( x ) − f ^ ( x + Δ x n t ) = 1 2 λ ( x ) 2 f(x) = \mathop{inf} \limits_{y} \hat{f}(y)=f(x)-\hat{f}(x+\Delta x_{nt})=\frac{1}{2}\lambda (x)^2 f(x)=yinff^(y)=f(x)−f^(x+Δxnt)=21λ(x)2
λ ( x ) = ( Δ x n t T ∇ 2 f ( x ) Δ x n t ) 1 / 2 \lambda (x) = (\Delta x_{nt}^T \nabla^2f(x) \Delta x_{nt})^{1/2} λ(x)=(ΔxntT∇2f(x)Δxnt)1/2
∇ f ( x ) T Δ x n t = − λ ( x ) 2 \nabla f(x)^T \Delta x_{nt}=-\lambda (x)^2 ∇f(x)TΔxnt=−λ(x)2
Newton步径同样是仿射不变的。
Newton步径常常用作停止准则的设计。
Newton 方法
算法如下:
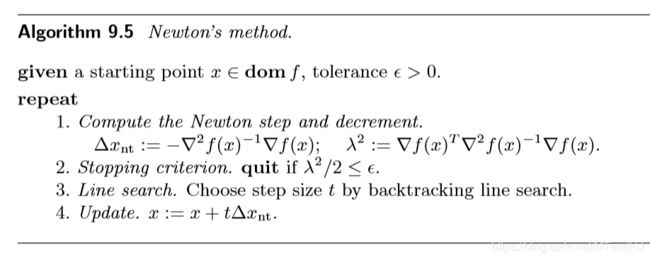
收敛性分析
收敛性分为俩个阶段,证明比较多,这里只给出结果。

第一阶段为阻尼Newton阶段,第二阶段为二次收敛阶段。
数值实验
我们依然选择 f ( x ) = e x 1 + 3 x 2 − 0.1 + e x 1 − 3 x 2 − 0.1 + e − x 1 − 0.1 f(x)=e^{x_1+3x_2-0.1}+e^{x_1-3x_2-0.1}+e^{-x_1-0.1} f(x)=ex1+3x2−0.1+ex1−3x2−0.1+e−x1−0.1, α = 0.2 , β = 0.7 \alpha=0.2,\beta=0.7 α=0.2,β=0.7,初始点为 ( 7 , 3 ) (7, 3) (7,3),下图采用牛顿方法的图(代码应该没写错吧)。

下图初始点为 ( − 5 , 3 ) (-5, 3) (−5,3)
代码
def hessian(x):
x0 = x[0]
x1 = x[1]
hessian = np.zeros((2, 2), dtype=float)
element1 = np.exp(x0 + 3 * x1 - 0.1)
element2 = np.exp(x0 - 3 * x1 - 0.1)
element3 = np.exp(-x0 - 0.1)
hessian[0, 0] = element1 + element2 + element3
hessian[0, 1] = 3 * element1 - 3 * element2
hessian[1, 0] = 3 * element1 - 3 * element2
hessian[1, 1] = 9 * element1 + 9 * element2
return np.linalg.inv(hessian)
下降方法也修改了一下:
def grad3(self, gradient, alpha, beta, error=1e-5):
"""回溯直线收缩算法 Newton步径
gradient: 梯度需要给出
alpha: 下降的期望值 (0, 0.5)
beta:每次更新的倍率 (0, 1)
error: 梯度的误差限,默认为1e-5
"""
assert hasattr(gradient, "__call__"), \
"Invalid gradient"
assert 0 < alpha < 0.5, \
"alpha should between (0, 0.5), but receive {0}".format(alpha)
assert 0 < beta < 1, \
"beta should between (0, 1), but receive {0}".format(beta)
error = error if error > 0 else 1e-5
def search_t(alpha, beta, grad, hessian_inv):
"""回溯"""
t = 2
t_old = 2
step = grad @ hessian_inv
grad_module = grad @ step
assert grad_module >= 0, "wrong in grad_module"
while True:
newx = self.x + t * step
newy = self.__f(newx)
if newy < self.y - alpha * t * grad_module:
return t_old
else:
t_old = t
t = t_old * beta
while True:
grad = -gradient(self.x)
hessian_inv = hessian(self.x)
t = search_t(alpha, beta, grad, hessian_inv)
x = self.x + t * grad @ hessian_inv
lam = grad @ hessian_inv @ grad
if lam / 2 < error: #判别准则变了
break
else:
self.x = x
self.y = self.__f(self.x)
self.__process.append((self.x, self.y))