Xgboost系统设计:分块并行、缓存优化和Blocks for Out-of-core Computation
Xgboost的原理我之前已经介绍过了,详见《(二)提升树模型:Xgboost原理与实践》。 最近,想起来阅读Xgboost源论文中还没有读过的一块,即第4章SYSTEM DESIGN系统实现。第4章包括3个小节:
-
Column Block for Parallel Learning
-
Cache-aware Access
-
Blocks for Out-of-core Computation
在阅读源论文的基础上,本篇博客依次介绍这3个部分。
一、分块并行 – Column Block for Parallel Learning
在建树的过程中,最耗时是找最优的切分点,而这个过程中,最耗时的部分是将数据排序。为了减少排序的时间,Xgboost采用Block结构存储数据。它有如下几点特征:
-
Block中的数据以稀疏格式CSC进行存储。CSC格式请参考该文章。
-
Block中的特征进行排序(不对缺失值排序),且只需要排序一次,以后分裂树的过程可以复用。
对于exact greedy算法来说,Xgboost将所有的数据放到了一个Block中。在Block中,可以同时对所有叶子进行分裂点的计算,因此对Block进行一次扫描将可以得到所有叶子的分割特征点候选者的统计数据。(We do the split finding of all leaves collectively, so one scan over the block will collect the statistics of the split candidates in all leaf branches.) Block 中特征还需存储指向样本的索引,这样才能根据特征的值来取梯度。如下图所示:

对于approximate算法来说,Xgboost使用了多个Block,存在多个机器上或者磁盘中。每个Block对应原来数据的子集。不同的Block可以在不同的机器上计算。该方法对Local策略尤其有效,因为Local策略每次分支都重新生成候选切分点。
Block结构还有其它好处,数据按列存储,可以同时访问所有的列,很容易实现并行的寻找分裂点算法。缺点是空间消耗大了一倍。
从时间复杂度上来分析:
对于exact greedy算法:复杂度从原来的 O ( K d ∣ ∣ x ∣ ∣ 0 log n ) O(K d||x||_0\log n) O(Kd∣∣x∣∣0logn)降为 O ( K d ∣ ∣ x ∣ ∣ 0 + ∣ ∣ x ∣ ∣ 0 log n ) O(Kd||x||_0+||x||_0\log n) O(Kd∣∣x∣∣0+∣∣x∣∣0logn),其中 d d d为树的最大深度, K K K为树的数量, ∣ ∣ x ∣ ∣ 0 ||x||_0 ∣∣x∣∣0为训练集中非缺失值的个数。这样,Exact greedy算法就省去了每一步中的排序开销。当 log n \log n logn大的时候,省去的时间就很多了。
对于approximate算法:复杂度从原来的 O ( K d ∣ ∣ x ∣ ∣ 0 log q ) O(K d||x||_0\log q) O(Kd∣∣x∣∣0logq)降为 O ( K d ∣ ∣ x ∣ ∣ 0 + ∣ ∣ x ∣ ∣ 0 log B ) O(Kd||x||_0+||x||_0\log B) O(Kd∣∣x∣∣0+∣∣x∣∣0logB),其中 q q q是候选分裂点的数量, B B B为每个Block中最大的行数。 q q q一般取值在32到100之间,因此省去的 log q \log q logq也是值得的。
这里,我分析一下时间复杂度,来自参考文献【4】:
如果我们不使用block结构时,即采用原始的稀疏精确算法时。为了在每一个节点node找到最优的分割,我们需要对每一个特征进行排序。则每层layer的时间复杂度非常粗略地近似 O ( ∥ x ∥ 0 log n ) O(\|\mathbf{x}\|_0 \log n) O(∥x∥0logn): 这是因为,如果对于特征 1 ≤ i ≤ m 1 \le i \le m 1≤i≤m,每个特征 i i i有 ∥ x ∥ 0 i \|\mathbf{x}\|_{0i} ∥x∥0i非零值,然后,在每一层我们需要排序,且每个特征最多有 n n n个(即样本为 n n n),因为所有特征的长度为 ∑ i = 1 m ∥ x ∥ 0 i = ∥ x ∥ 0 \sum_{i=1}^m \|\mathbf{x}\|_{0i} = \|\mathbf{x}\|_0 ∑i=1m∥x∥0i=∥x∥0,在这种情况下,排序时间不超过 O ( ∥ x ∥ 0 log n ) O(\|\mathbf{x}\|_0 \log n) O(∥x∥0logn)(注:快排的时间复杂度为 n log n n \log n nlogn)。在此基础上,乘以 K K K个树和 d d d层,因此时间复杂度为 O ( K d ∥ x ∥ 0 log n ) O(Kd\|\mathbf{x}\|_0 \log n) O(Kd∥x∥0logn) 。
如果我们使用block结构时,在一开始我们就已经对特征进行了排序,不需要在每个节点都排序。正如作者强调的,这时候时间复杂度降到了 O ( K d ∥ x ∥ 0 ) O(Kd\|\mathbf{x}\|_0) O(Kd∥x∥0),这是因为,我们对block扫描一遍时就可以得到各个节点的最优切分。再加上一开始排序的复杂度为 O ( ∥ x ∥ 0 log B ) O(\|\mathbf{x}\|_0 \log B) O(∥x∥0logB),(按照意义,这里 B B B就是 n n n)。因此,总时间复杂度为 O ( K d ∣ ∣ x ∣ ∣ 0 + ∣ ∣ x ∣ ∣ 0 log B ) O(Kd||x||_0+||x||_0\log B) O(Kd∣∣x∣∣0+∣∣x∣∣0logB)。
二、缓存优化 – Cache-aware Access
使用Block结构的一个缺点是取梯度的时候,是通过索引来获取的,而这些梯度的获取顺序是按照特征的大小顺序的。这将导致非连续的内存访问,可能使得CPU cache缓存命中率低,从而影响算法效率。如下图所示:

因此,对于exact greedy算法中, 使用缓存预取(cache-aware prefetching)。具体来说,对每个线程分配一个连续的buffer,读取梯度信息并存入Buffer中(这样就实现了非连续到连续的转化),然后再统计梯度信息。该方式在训练样本数大的时候特别有用,见下图:
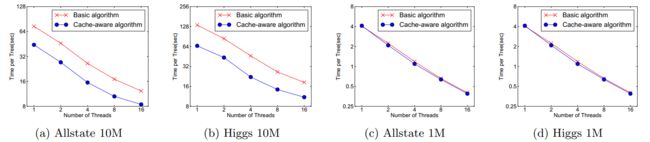
可以看到,对于大规模数据,效果十分明显。
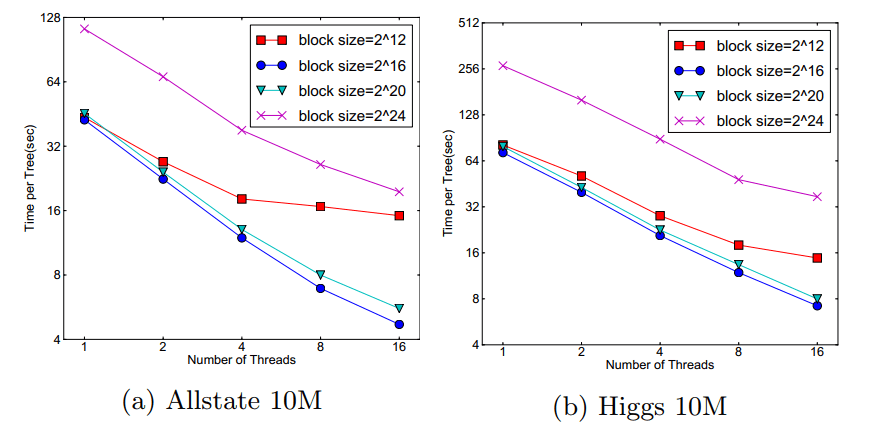
在approximate 算法中,对Block的大小进行了合理的设置。定义Block的大小为Block中最多的样本数。设置合适的大小是很重要的,设置过大则容易导致命中率低,过小则容易导致并行化效率不高。经过实验,发现2^16比较好。如下图:
三、Blocks for Out-of-core Computation
当数据量太大不能全部放入主内存的时候,为了使得out-of-core计算称为可能,将数据划分为多个Block并存放在磁盘上。计算的时候,使用独立的线程预先将Block放入主内存,因此可以在计算的同时读取磁盘。但是由于磁盘IO速度太慢,通常更不上计算的速度。因此,需要提升磁盘IO的销量。Xgboost采用了2个策略:
-
Block压缩(Block Compression):将Block按列压缩(LZ4压缩算法?),读取的时候用另外的线程解压。对于行索引,只保存第一个索引值,然后只保存该数据与第一个索引值之差(offset),一共用16个bits来保存
offset,因此,一个block一般有2的16次方个样本。 -
Block拆分(Block Sharding):将数据划分到不同磁盘上,为每个磁盘分配一个预取(pre-fetcher)线程,并将数据提取到内存缓冲区中。然后,训练线程交替地从每个缓冲区读取数据。这有助于在多个磁盘可用时增加磁盘读取的吞吐量。
参考文献
【1】XGBoost: A Scalable Tree Boosting System
【2】『我爱机器学习』集成学习(三)XGBoost
【3】GBDT算法原理与系统设计简介
【4】XGBoost paper - time complexity analysis