第十三章 图像的几何变换之旋转
旋转,在几何变换中属于比较复杂的算法。因为旋转算法无法离开旋转方程。先进行旋转方程的推导吧。这个是初中的知识。复习一下。
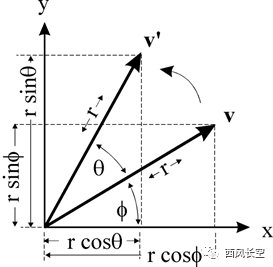
如图所示,点V绕原点旋转θ角,得到V’.假设V点的坐标是x,y.则V到原点的距离是R .它的角度是ϕ。则
X= Rcos(ϕ) Y = Rsin(ϕ)
V’旋转θ 的
X’ = Rcos(ϕ+θ); Y’ = Rsin(ϕ+θ);
展开后得
x’=rcosθ cosϕ -rsinθ cosϕ 代入后得
X’=xcosθ -ysinθ
Y’=xsinθ+ycosθ;
这个是直接旋转的方程。
同样下图是直接旋转后的结果图。
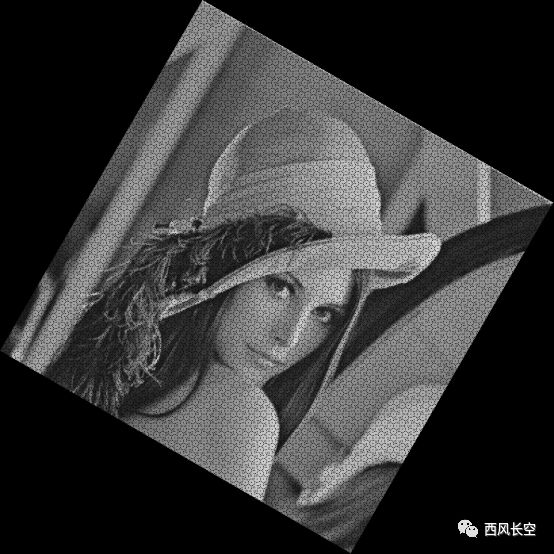
对于旋转,有两个细节。需要解决。第一,一般情况下,我们旋转是通过A旋转后得到B。但是由于旋转是基于浮点数操作,或者说是基于非整数系数运算,但到结果成像素时又是整数,会舍弃掉一部分数据,所以一般情况下直接A旋转后得到B会造成图像跳点。第二,由于旋转后会偏离中心,所以我们会对图像进行半长半宽的反向移位以保证正确性。如上图所示。
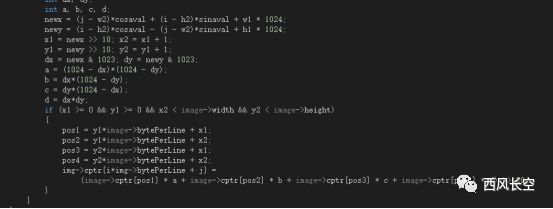
正确的做法是由结果推导取源图像中的像素混合运算。公式不变,但数据变了。正确的运算结果是:

下面针对两种算法贴上代码:
PStruImage ImageRotateDirect(PStruImage image, float angle)
{
#define RADIAN3.1415926
int width = image->width;
int height = image->height;
float newwid, newhei;
int i, j;
int w1, w2, h1, h2;
float sinaval = 0;
float cosaval = 0;
PStruImage img;
sinaval = sin(angle *RADIAN /180);
cosaval = cos(angle *RADIAN /180);
if (angle < 0)
{
newwid = width*cosaval - height*sinaval + 0.5;
newhei = width*sinaval + height*cosaval +0.5;
}
else
{
newwid = width*cosaval + height*sinaval + 0.5;
newhei = width*sinaval + height*cosaval + 0.5;
}
img = CreatImage(abs((int)newwid), abs((int)newhei), image->nchannels);
w1 = width /2;
h1 = height/2;
w2 = newwid/2;
h2 = newhei/2;
for (i = 1; i { for (j = 1; j < width; j++) { float newx, newy; int x1, y1, x2, y2; int pos1, pos2, pos3, pos4; float dx, dy; int a, b, c, d; newx = (j-w1)*cosaval - (i-h1)*sinaval+w2; newy = (i-h1)*cosaval + (j-w1)*sinaval+h2; x1 = (newx); x2 = x1 + 1; y1 = (newy); y2 = y1 + 1; if (x1 >= 0 && y1 >= 0 && x2 < img->width && y2 < img->height) { img->cptr[y1*img->bytePerLine + x1] = image->cptr[i*image->bytePerLine + j]; } } } return img; } 对于正确的离解算法的代码我就只贴关键部分的图了. 上面算法进行了嵌入式级的优化。 源代码: https://download.csdn.net/download/finger157959/12528142