动态矩阵控制(DMC)的简单理解及其示例
文章结构
- 前言
- DMC的基本思想
- 预测模型
- 滚动优化
- 反馈校正
- DMC的控制流程
- DMC简单示例
- 结束语
前言
在模型预测控制的课程当中接触到了动态矩阵控制(DMC)算法,虽然不会在以后继续深入,但它控制、预测和校正的思想还是可圈可点的。本文将简要概述DMC的基本原理和控制流程,尽量做到省去复杂的数学公式而理解DMC。但由于接触不深且实力有限,本文的表述可能会有一些不准确或者错误,因此仅供参考,同时欢迎大家指正。
DMC的基本思想
动态矩阵控制(DMC)是在上世纪80年代提出的一种典型的模型预测控制(MPC)方法。虽然在今天它已经不再是MPC的研究关注点,但其思想却非常值得借鉴,因此几乎所有的模型预测控制教材都把DMC作为一部分来讲解。概括来说,DMC的特点主要有:
- 控制与系统的数学模型无关,仅需获取系统的阶跃响应序列,方法适用于稳定的系统;
- 系统的动态特性中具有纯滞后或非最小相位特性都不影响算法的直接应用。
也就是说,使用DMC无需知道被控对象地数学模型,只需要获取被控对象的阶跃响应序列即可对实现控制效果,但需要被控对象是渐进稳定的。同时,即使被控对象有一定的纯滞后特性,或者是非最小相位的(对象传递函数的零点存在于S域右半平面)都不影响DMC的使用。从上面的特性可以,DMC的应用范围是比较广泛的。接下来就简单地谈一谈DMC的三要素,既预测模型、滚动优化和反馈校正。
预测模型
DMC的使用需要建立在预测模型的基础上。简单来说就是,DMC控制器希望通过已有信息构造未来若干时刻的系统输入并预测系统的输出。那么要如何实现呢?可行的方案之一是使用系统的阶跃响应序列。由线性时不变(LTI)系统具备的比例叠加性质可知,在已知从0开始的系统N个采样点上的阶跃响应序列的情况下,系统在k时刻对未来P个时刻的输出预测 Y ( k ) Y(k) Y(k)可由系统在k时刻的输出预测初值 Y 0 ( k ) Y_0(k) Y0(k)与M个连续的输入增量序列 Δ U ( k ) \Delta U(k) ΔU(k)及由阶跃响应序列组成的动态矩阵A计算得到,其计算表达式如下:
Y ( k ) = Y 0 ( k ) + A Δ U ( k ) Y(k)=Y_0(k)+A\Delta U(k) Y(k)=Y0(k)+AΔU(k)
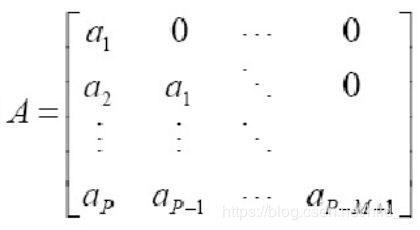
其中N称为截断步长,P称为预测步长,M称为控制步长,它们三者之间的大小关系一般为N > P > M > 0。动态矩阵A由阶跃响应序列 [a(0), a(1), a(2) … a(N-1)] 构造得到,其具体构成如下:
DMC控制的期望效果是:在M个连续的控制输入序列作用下,系统的输出在P个时刻以内稳定在参考输出值。
滚动优化
在理想状态下,DMC控制器的确可能如期望的那样工作:仅需一次确定控制输入序列,然后静待系统的输出稳定在参考输出值,期间什么也不用做。然而在实际的系统中,由于系统扰动的存在使得这样理想的控制毫无可能。因此实际的做法是,在每个时刻k,控制器都会确定从该时刻起的M个控制增量序列用于预测控制,滚动优化也因此而得名。那么DMC又是如何确定每个时刻的控制增量的呢?答案便是采用最优控制的求解方法得到。模型预测控制与最优控制可以说是紧密相连的。在每次滚动优化时,都可以看作是根据当前已知信息确定未来控制增量的最优求解问题。而最优控制的基本思想在于:确定目标函数,并根据约束条件进行求解。在DMC的简单应用中一般是在无约束的条件下求解,而DMC控制增量求解的目标函数通常定义为如下:
m i n J = [ r p ( k ) − ( y p 0 ( k ) + A Δ u M ( k ) ) ] T Q [ r p ( k ) − ( y p 0 ( k ) + A Δ u M ( k ) ) ] + Δ u M T ( k ) R Δ u M ( k ) minJ=[r_p(k)-(y_{p0}(k)+A\Delta u_M(k))]^{T}Q[r_p(k)-(y_{p0}(k)+A\Delta u_M(k))]+\Delta u^{T}_M(k)R\Delta u_M(k) minJ=[rp(k)−(yp0(k)+AΔuM(k))]TQ[rp(k)−(yp0(k)+AΔuM(k))]+ΔuMT(k)RΔuM(k)
目标函数可以解释为:一方面我们希望系统在控制增量的作用下尽可能趋近于参考输出,一方面又希望控制增量在控制达到稳定后可以趋近于0,避免对执行机构造成不利的影响。可以看出,定义的目标函数是典型的二次型形式,可通过简单的二次规划或者变分法求解得到k时刻下的最优控制增量 Δ u M ∗ ( k ) \Delta u^{*}_M(k) ΔuM∗(k)如下:
Δ u M ∗ ( k ) = ( A T Q A + R ) − 1 A T Q [ r p ( k ) − y p 0 ( k ) ] \Delta u^{*}_M(k)=(A^{T}QA+R)^{-1}A^{T}Q[r_p(k)-y_{p0}(k)] ΔuM∗(k)=(ATQA+R)−1ATQ[rp(k)−yp0(k)]
其中 y p 0 ( k ) y_{p0}(k) yp0(k)为模型预测初值的前P个元素构成的序列。上式求解得到的 Δ u M ∗ ( k ) \Delta u^{*}_M(k) ΔuM∗(k)为一个向量,然而实际上DMC仅使用其中第一个元素用于预测控制,这也是滚动优化的特点。
反馈校正
在预测模型和滚动优化的基础上,DMC控制器已经可以实现开环控制的效果。理想情况下,既排除模型失配,环境干扰等因素,开环控制器可以较好地完成控制工作。但那也是在理想环境下,在真实环境中系统工作时一定会伴随着不确定的系统扰动,这时候应该做的便是将开环控制转为闭环控制以提升系统的抗扰动能力,而DMC也是这样做的。DMC在运行时会采集实时信息对预测模型进行校正,之后再进行新的优化,这个过程便是反馈校正。由于它是在线修改预测模型,因此也可以看作是一种在线辨识的方法。
反馈校正的思路在于:在k时刻时,将计算得到的最优控制增量 Δ u ( k ) \Delta u(k) Δu(k)作用于模型,可得到未来N个时刻的模型输出预测记为 y N 1 ( k ) y_{N1}(k) yN1(k),取预测输出值的第一个元素,既下一时刻的预测输出值 y 1 ( k + 1 ∣ k ) y_1(k+1|k) y1(k+1∣k)与下一时刻被控对象的实际输出值 y ( k + 1 ) y(k+1) y(k+1)进行比较,得到预测的误差 e ( k + 1 ) e(k+1) e(k+1)如下:
e ( k + 1 ) = y ( k + 1 ) − y 1 ( k + 1 ∣ k ) e(k+1)=y(k+1)-y_1(k+1|k) e(k+1)=y(k+1)−y1(k+1∣k)
接着对误差 e ( k + 1 ) e(k+1) e(k+1)加权得到加权误差序列用于修正预测模型,其计算表达式如下:
y c o r ( k + 1 ) = y N 1 ( k ) + h e ( k + 1 ) y_{cor}(k+1)=y_{N1}(k)+he(k+1) ycor(k+1)=yN1(k)+he(k+1)
其中 y c o r ( k + 1 ) y_{cor}(k+1) ycor(k+1)为下一时刻修正后的模型输出预测值;h为N维误差加权序列。此时还需对 y c o r ( k + 1 ) y_{cor}(k+1) ycor(k+1)进行一步转移操作最终得到 y N 0 ( k + 1 ) y_{N0}(k+1) yN0(k+1)作为下一时刻的模型预测初值,其计算表达式如下:
y N 0 ( k + 1 ) = S y c o r ( k + 1 ) y_{N0}(k+1)=Sy_{cor}(k+1) yN0(k+1)=Sycor(k+1)
其中S矩阵的构成如下:

DMC的控制流程
在介绍完DMC的基本思想后,即可简单地介绍DMC的控制流程。整个控制过程简单来说就是:在k时刻,首先将k-1时刻的控制输入 u ( k − 1 ) u(k-1) u(k−1)作用于被控对象并测量k时刻被控对象的输出值 y ( k ) y(k) y(k),接着取k时刻的模型预测序列 y N 1 ( k − 1 ) y_{N1}(k-1) yN1(k−1)的第一个元素既 y 1 ( k ∣ k − 1 ) y_1(k|k-1) y1(k∣k−1)与 y ( k ) y(k) y(k)进行比较得到预测误差 e ( k ) e(k) e(k), e ( k ) e(k) e(k)经过h向量加权与 y N 1 ( k − 1 ) y_{N1}(k-1) yN1(k−1)相加后进行一步转移得到k时刻的模型预测初值 y N 0 ( k ) y_{N0}(k) yN0(k),取它的前P个元素构成 y P 0 ( k − 1 ) y_{P0}(k-1) yP0(k−1)与参考轨迹 w P ( k ) w_P(k) wP(k)进行比较,利用前面滚动优化中提到的最优解方程求出k时刻的控制输入增量 Δ u ( k ) \Delta u(k) Δu(k),最后累加得到 u ( k ) = u ( k − 1 ) + Δ u ( k ) u(k)=u(k-1)+\Delta u(k) u(k)=u(k−1)+Δu(k),同时将 Δ u ( k ) \Delta u(k) Δu(k)作用于预测模型,得到k时刻的模型预测值 y N 1 ( k ) y_{N1}(k) yN1(k)。DMC的控制流程图如下:
模型预测控制教材上的DMC的系统控制框图如下所示:

DMC简单示例
在理解DMC的基本思想和大概的控制流程后,最后附上一个简单的例子帮助理解。本例中被控对象的传递函数为:
G ( s ) = s + 5 s 2 + 5 s + 3 G(s)=\frac{s+5}{s^2+5s+3} G(s)=s2+5s+3s+5
系统输出的参考轨迹设定为阶跃函数,既取定值1的序列。DMC控制的参数取N=20,P=10,M=1,采样周期Ts=1。具体的程序如下:
clc,close,clear;
% 被控对象传递函数
num=[1 5];
den=[1 5 3];
g=tf(num,den);
steps=100; % 仿真步数
ts=1; % 采样周期
p=10; % 预测步长
m=1; % 控制步长
n=20; % 截断步长
% 离散状态空间方程
[as,bs,cs,ds]=tf2ss(num,den);
[ad,bd]=c2d(as,bs,ts);
xs0=[0 0]';
% 传递函数阶跃响应
[a0,t]=step(g,0:ts:(n-1)*ts);
% 构造动态矩阵
a=zeros(p,m);
a(:,1)=a0(1:p);
for i=1:p
for j=2:m
if i>=j
a(i,j)=a(i-1,j-1);
end
end
end
% 离线计算最优解系数d
q=eye(p);
r=0*eye(m);
c=zeros(m,1);
c(1)=1;
d=(a'*q*a+r)^-1*a'*q;
d=c'*d;
% 构造误差加权向量及转移矩阵
h=0.5*ones(n,1);
h(1)=1;
s=zeros(n,n);
for i=1:n-1
s(i,i+1)=1;
end
s(n,n)=1;
yr=ones(p,1); % 参考轨迹
y0=zeros(n,1); % 模型预测
y=zeros(steps,1); % 实际输出
u=zeros(steps,1); % 系统控制量
% 首步计算
xs1=ad*xs0;
y(1)=cs*xs1;
xs0=xs1;
ycor=y0+h*(y(1)-y0(1));
y0=s*ycor;
du=d*(yr-y0(1:p));
y0=y0+a0*du;
u(1)=du;
% 滚动优化
for k=2:steps
xs1=ad*xs0+bd*u(k-1);
y(k)=cs*xs1+ds*u(k-1);
xs0=xs1;
ycor=y0+h*(y(k)-y0(1));
y0=s*ycor;
du=d*(yr-y0(1:p));
y0=y0+a0*du;
u(k)=u(k-1)+du;
end
% 绘制图形
figure(1);
subplot(211);
plot(y,'linewidth',2);
title('系统输出');
xlabel('t');
ylabel('y');
ylim([0 1.2])
grid on;
subplot(212);
plot(u,'linewidth',2);
title('控制输入');
xlabel('t');
ylabel('u');
grid on;
DMC仿真结果绘制的曲线如下:

结束语
花了一点时间简单把课程涉及到的动态矩阵控制算法进行了介绍,以起到加深对方法理解的作用。但由于水平有限,表述不怎么准确,因此本文仅供参考(毕竟也没想花太多时间在这上面)。实际上DMC已经不是模型预测控制领域的关注点。作为一种典型的方法,它的思想值得借鉴,但确实不具备太大的实用性,在一些应用场景中甚至不及PID的控制性能。它的亮点在于引入预测控制后控制的鲁棒性有所提升,但同时也伴随着计算量过大的缺陷。总地来说,DMC的思想是值得借鉴的,但也仅此而已。如果需要更好地学习模型预测控制,那理解DMC只是第一步或者根本不需要这一步。