ZYNQ基础系列(五) AMP模式 双裸核CPU同时运行
AMP模式 双核CPU同时运行
从软件的角度来看,多核处理器的运行模式有三种:
AMP(非对称多进程):多个核心相对独立的运行不同的任务,每个核心可能运行不同的操作系统或裸机程序,但是有一个主要核心,用来控制整个系统以及其它从核心
SMP(对称多进程):一个操作系统同等的管理各个内核,例如PC机
BMP(受约束多进程):与SMP类似,但开发者可以指定将某个任务仅在某个指定内核上执行
默认情况下,ZYNQ仅运行一个CPU,这里主要研究AMP模式下,两个CPU同时运行
实验目的
使用ZYNQ7010完成
1> CPU0在裸核下运行helloworld,CPU1在裸核下运行流水灯
2> CPU0在linux下运行helloworld,CPU1在裸核下运行流水灯
硬件环境
硬件环境过于简单,这里只文字描述
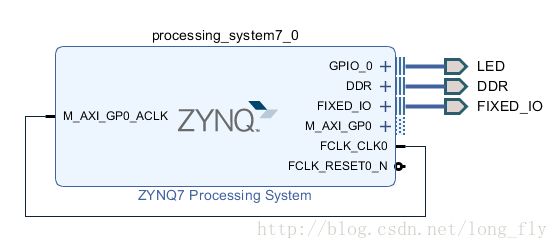
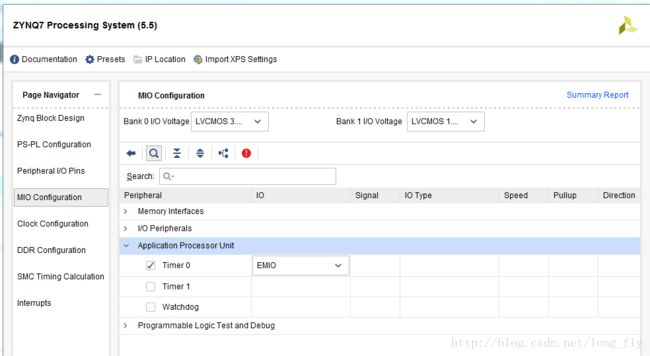
1.创建原理图,添加PS核,双击进入PS的配置界面
2.peripheral I/O pin里开启串口和EMIO和SD卡
3.在MIO configuration中,配置EMIO宽度为4
4.在clock configuration和DDR configuration中,设置对应的时钟频率和DDR型号
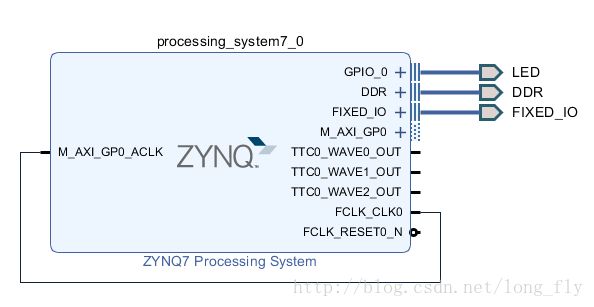
5.关闭配置界面,原理图如下
6.右击原理图,生成输出文件
7.右击原理图,生成顶层文件
8.对LED进行引脚约束
set_property PACKAGE_PIN N15 [get_ports {LED_tri_io[0]}]
set_property PACKAGE_PIN N16 [get_ports {LED_tri_io[1]}]
set_property PACKAGE_PIN M19 [get_ports {LED_tri_io[2]}]
set_property PACKAGE_PIN M20 [get_ports {LED_tri_io[3]}]
set_property IOSTANDARD LVCMOS33 [get_ports {LED_tri_io[0]}]
set_property IOSTANDARD LVCMOS33 [get_ports {LED_tri_io[1]}]
set_property IOSTANDARD LVCMOS33 [get_ports {LED_tri_io[2]}]
set_property IOSTANDARD LVCMOS33 [get_ports {LED_tri_io[3]}]9.综合、实现、生成bit文件,并导出硬件,运行SDK
SDK环境
AMP模式的使用,重点在SDK上
1.创建CPU0工程,选择生成helloworld例程,内容为:
#include 2.创建CPU1工程
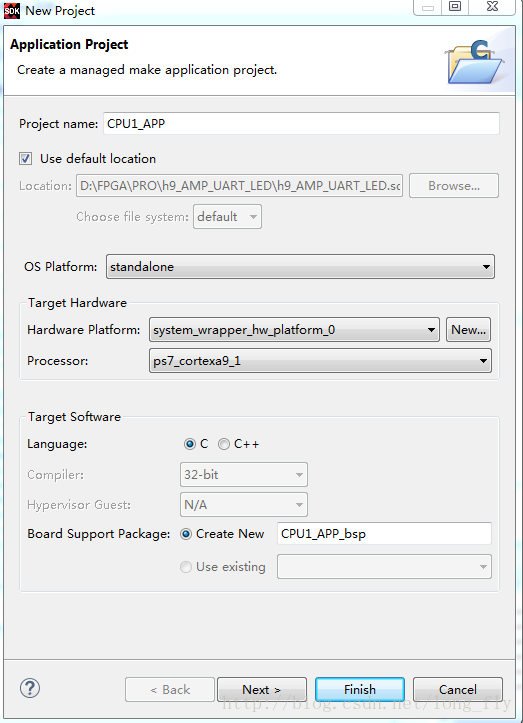
注意选择核1,创建led.c为主函数,内容为:
#include "xgpiops.h"
#include "sleep.h"
int main()
{
static XGpioPs psGpioInstancePtr;
XGpioPs_Config* GpioConfigPtr;
int xStatus;
GpioConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
if(GpioConfigPtr == NULL) return XST_FAILURE;
xStatus = XGpioPs_CfgInitialize(&psGpioInstancePtr,GpioConfigPtr,GpioConfigPtr->BaseAddr);
if(XST_SUCCESS != xStatus) return -1;
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 54,1);
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 55,1);
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 56,1);
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 57,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, 54,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, 55,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, 56,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, 57,1);
while(1)
{
XGpioPs_WritePin(&psGpioInstancePtr, 54, 1);
sleep(1);
XGpioPs_WritePin(&psGpioInstancePtr, 54, 0);
XGpioPs_WritePin(&psGpioInstancePtr, 55, 1);
sleep(1);
XGpioPs_WritePin(&psGpioInstancePtr, 55, 0);
XGpioPs_WritePin(&psGpioInstancePtr, 56, 1);
sleep(1);
XGpioPs_WritePin(&psGpioInstancePtr, 56, 0);
XGpioPs_WritePin(&psGpioInstancePtr, 57, 1);
sleep(1);
XGpioPs_WritePin(&psGpioInstancePtr, 57, 0);
sleep(1);
}
return 0;
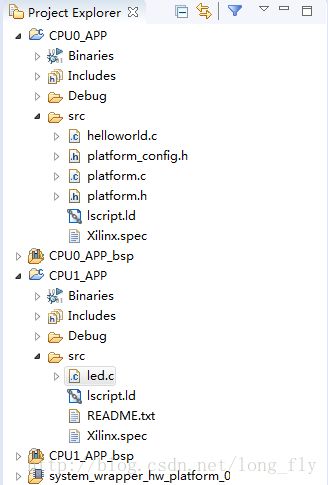
}3.工程结构为:
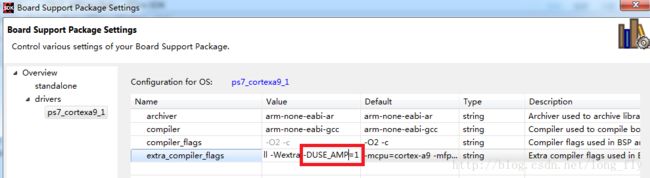
4.CPU1的BSP SETTING中添加 -DUSE_AMP=1
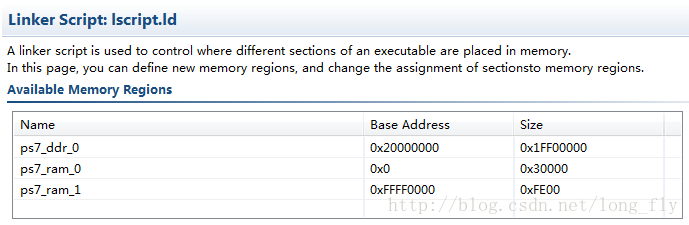
5.DDR空间分配
通过修改lscript.ld文件中的内容,可以改变在存储器中的执行位置,
因为ELF文件是加载到DDR中执行的,所以两个DDR地址不能重合
CPU0:

CPU1:
6.运行debug



两个CPU都运行起来了,且不相互干扰
7.固化到SD卡中启动
再创建一个FSBL的工程,在FSBL的src中找到main.c文件打开,在里面添加下面一段代码,用于启动CPU1:
#define sev() __asm__("sev")
#define CPU1STARTADR 0xFFFFFFF0
#define CPU1STARTMEM 0x20000000
void StartCpu1(void)
{
#if 1
fsbl_printf(DEBUG_GENERAL,"FSBL: Write the address of the application for CPU 1 to 0xFFFFFFF0\n\r");
Xil_Out32(CPU1STARTADR, CPU1STARTMEM);
dmb(); //waits until write has finished
fsbl_printf(DEBUG_GENERAL,"FSBL: Execute the SEV instruction to cause CPU 1 to wake up and jump to the application\n\r");
sev();
#endif
}前面添加的是CPU1的启动函数,再找到Load boot image的位置,将CPU1的启动函数,放置于此位置,改动后的代码段如下:
/*
* Load boot image
*/
HandoffAddress = LoadBootImage();
fsbl_printf(DEBUG_INFO,"Handoff Address: 0x%08lx\r\n",HandoffAddress);
StartCpu1(); /*add starting cpu1*/
将上述文件合并为BIN文件,并放入SD卡中,ZYNQ启动模式要为SD启动,正常情况下将正常工作
注—-若是没出现正常的现象,则可能是:
1>SD卡的bank电压及引脚速度选择错误
2>CPU0和CPU1的DDR地址冲突
3>未在FSBL的main.c中加入StartCpu1函数
那么,双裸核实验到此结束
分界线:下面是linux+裸核的实验,但是CPU1只能短暂工作,即实验暂时失败,之后有需要再研究,下面是失败案例,不要看
双核分别跑不同的系统
接下来,将在已有的双核基础上,实现双核的linux+裸核工作
CPU0的linux系统将通过petalinux方式移植,CPU1则按照上述的方式照旧
linux具体的移植方式参考:petalinux方式移植linux
硬件上:
在之前的硬件基础上,添加TTC:
重新生成的PS核:
更新输出文件后,重新综合、实现、生成bit文件、导出硬件,上述工作完成后,可以在/(工程文件夹)/(工程名).sdk这个文件夹下找到.hdf后缀的文件,待用
开启linux虚拟机:
在普通用户(非超级用户)模式下:
#工作目录
cd PRO
#定位编译链
source /home/hlf/mnt/petalinux/settings.sh
#创建工程并命名
petalinux-create --type project --template zynq --name h2_amp
#进入工程目录
cd h2_amp
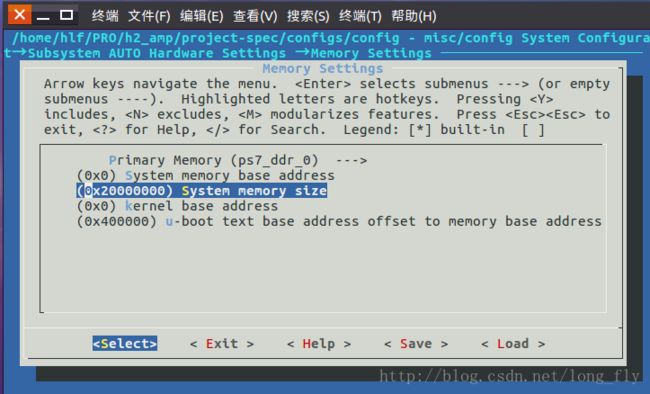
#将.hdf文件拷到文件夹中,并引用硬件描述文件,遇到配置界面做如下修改后,直接save并exit,等待默认配置
petalinux-config --get-hw-description=/home/hlf/PRO/h2_ampSubsystem AUTO Hardware Settings —>
Memory Settings —>
#获取文件夹权限(工程文件夹和petalinux的安装文件夹),否则编译的时候,会发生错误
sudo chmod -R 777 /home/hlf
#编译u-boot,直接save为u-boot.config,并exit
petalinux-config -c u-boot
#编译kernel,操作同上(save为kernel.config)
petalinux-config -c kernel
#编译rootfs,操作同上(save为默认即可)
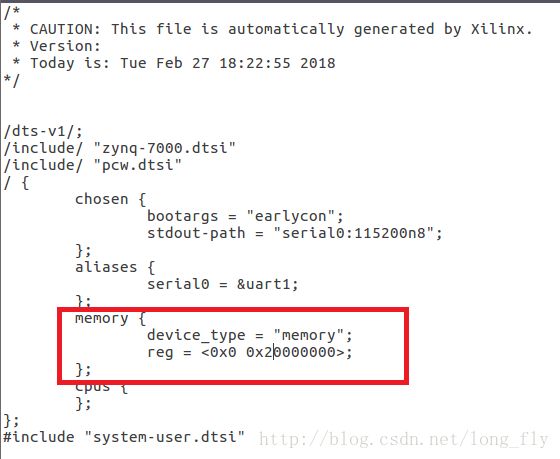
petalinux-config -c rootfs设备树配置:在工程文件夹下,Ctr+F搜索.dts就可以找到相关文件
打开设备树文件,修改DDR地址,还是注意与petalinux-config时的设置值一致,不要和CPU1的DDR地址重叠
#一切就绪后,编译工程
petalinux-build编译完成后:进入(工程目录)/image/linux目录,将u-boot.elf和image.ub文件拷贝出来
打开SDK:新建CPU1的工程,和之前例子里的配置相同(主要注意修改BSP和DDR地址),然后新建一个FSBL的工程,其步骤也是和之前一样的(添加CPU1的启动函数),然后按照顺序FSBL.elf — xxx.bit — u-boot.elf — CPU1_APP.elf 的顺序制作BOOT.bin文件,将BOOT.bin和image.ub拷贝到SD卡中,开机
#现象:linux系统正常运行,但是流水灯正常运行一段时间后停止运行,卡在某一个灯,可能是linux的运行影响了CPU1的工作