基于 RT-Thread 的智能家居系统 Demo(一)使用 Sensor 框架读取 DS18B20 温度数据
学习要点:
- 实现 DS18B20 温度传感器驱动;
- 介绍 RT-Thread 的 sensor 组件;
- 将 DS18B20 温度传感器对接 RT-Thread 的 sensor 组件(提高上层代码的可重用性);
- 学习线程的使用,在线程中正确读取 DS18B20 温度值。
DS18B20 驱动
头文件 sensor_dallas_ds18b20.h,提供以下 API:
| API | 描述 |
|---|---|
ds18b20_init |
初始化 ds18b20 设备 |
ds18b20_get_temperature |
读取 ds18b20 温度数据 |
rt_hw_ds18b20_init |
初始化并注册 ds18b20 设备 |
#ifndef __DS18B20_H__
#define __DS18B20_H__
#include 源文件 sensor_dallas_ds18b20.c,具体如下:
#include "sensor_dallas_ds18b20.h"
#include "sensor.h"
#include "board.h"
#include 将这两个文件放到 bsp 工程的 board/ports/ 目录下,并修改 board/SConscript 文件,如下:
import os
import rtconfig
from building import *
Import('SDK_LIB')
cwd = GetCurrentDir()
# add general drivers
src = Split('''
board.c
CubeMX_Config/Src/stm32f4xx_hal_msp.c
''')
src += Glob('ports/sensor_dallas_ds18b20.c')
path = [cwd]
path += [cwd + '/CubeMX_Config/Inc']
path += [cwd + '/ports']
startup_path_prefix = SDK_LIB
if rtconfig.CROSS_TOOL == 'gcc':
src += [startup_path_prefix + '/STM32F4xx_HAL/CMSIS/Device/ST/STM32F4xx/Source/Templates/gcc/startup_stm32f411xe.s']
elif rtconfig.CROSS_TOOL == 'keil':
src += [startup_path_prefix + '/STM32F4xx_HAL/CMSIS/Device/ST/STM32F4xx/Source/Templates/arm/startup_stm32f411xe.s']
elif rtconfig.CROSS_TOOL == 'iar':
src += [startup_path_prefix + '/STM32F4xx_HAL/CMSIS/Device/ST/STM32F4xx/Source/Templates/iar/startup_stm32f411xe.s']
# STM32F405xx) || STM32F415xx) || STM32F407xx) || STM32F417xx)
# STM32F427xx) || STM32F437xx) || STM32F429xx) || STM32F439xx)
# STM32F401xC) || STM32F401xE) || STM32F410Tx) || STM32F410Cx)
# STM32F410Rx) || STM32F411xE) || STM32F446xx) || STM32F469xx)
# STM32F479xx) || STM32F412Cx) || STM32F412Rx) || STM32F412Vx)
# STM32F412Zx) || STM32F413xx) || STM32F423xx)
# You can select chips from the list above
CPPDEFINES = ['STM32F411xE']
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = path, CPPDEFINES = CPPDEFINES)
Return('group')
Sensor 框架介绍
Sensor 框架的整体框架图如下所示。它为上层提供的是标准 device 接口 open/close/read/write/control,这些接口与上层用户程序对接,为底层驱动提供的是简单的 ops(operations 操作命令)接口 fetch_data/control,这两个接口对接具体硬件的底层驱动。除此之外,Sensor 框架还支持 module(模块),为底层存在耦合的传感器设备提供服务,如果,ds18b20 的底层不存在耦合,此处不需要用到 module。

Sensor 框架更多的介绍在 RT-Thread 的文档中心已有详细说明,这里不过多赘述,链接:https://www.rt-thread.org/document/site/development-guide/sensor/sensor_driver/
Sensor 框架的使用
看完文档中心的 Sensor 介绍后,相信大伙儿已经对这个框架有了一定的了解。有的小伙伴是不是早就按耐不住想要跃跃欲试将传感器对接到 Sensor 框架上?这里以 ds18b20 温度传感器为例子。
Sensor 框架的使用分三个步骤:
- 开启 sensor 框架
- ops 接口对接
- 传感器设备注册
开启 sensor 框架
在 menuconfig 中将它开启
RT-Thread Components --->
Device Drivers --->
[*] Using Sensor device drivers
打开之后,需要使用 scons --target=mdk5 更新工程即可。看,Sensor 框架加入到工程当中了:
ops 接口对接
我们知道,Sensor 框架的接口分为上层接口和底层接口两种。将 ds18b20 的底层驱动对接到框架上,其实对接就是 Sensor 框架的底层接口,具体的,是底层的 ops 接口。
我们在 RT-Thread 源码中可以找到 Sensor 框架的源码,源码路径为:rt-thread\components\drivers\sensors,在 sensor.h 文件中,我们可以找到对 ops 接口的定义,有两个函数指针,fetch_data 和 contorl。
struct rt_sensor_ops
{
rt_size_t (*fetch_data)(struct rt_sensor_device *sensor, void *buf, rt_size_t len);
rt_err_t (*control)(struct rt_sensor_device *sensor, int cmd, void *arg);
};
fetch_data作用是获取传感器数据control作用是通过控制命令控制传感器
ds18b20 并不支持 control,我们只需要实现 fetch_data 就好了。
Sensor 框架当前默认支持三种打开方式:
- 轮询(
RT_DEVICE_FLAG_RDONLY) - 中断(
RT_DEVICE_FLAG_INT_RX) - FIFO(
RT_DEVICE_FLAG_FIFO_RX)
需要在这里判断传感器的工作模式,然后再根据不同的模式返回传感器数据。我们以轮询的方式读取 ds18b20 的温度数据,那么 fetch_data 的实现如下:
static rt_size_t
ds18b20_fetch_data(struct rt_sensor_device *sensor, void *buf, rt_size_t len)
{
RT_ASSERT(buf);
if (sensor->config.mode == RT_SENSOR_MODE_POLLING) {
return _ds18b20_polling_get_data(sensor, buf);
}
else return 0;
}
具体的,_ds18b20_polling_get_data(sensor, buf) 的实现如下,其中,ds18b20_get_temperature 函数就是 ds18b20 温度传感器底层驱动的获取温度的函数。
static rt_size_t
_ds18b20_polling_get_data(rt_sensor_t sensor, struct rt_sensor_data *data)
{
rt_int32_t temperature_x10;
if (sensor->info.type == RT_SENSOR_CLASS_TEMP) {
temperature_x10 = ds18b20_get_temperature((rt_base_t)sensor->config.intf.user_data);
data->data.temp = temperature_x10;
data->timestamp = rt_sensor_get_ts();
}
return 1;
}
因为不需要 control,我们直接让 control 返回 RT_EOK 即可
static rt_err_t
ds18b20_control(struct rt_sensor_device *sensor, int cmd, void *args)
{
rt_err_t result = RT_EOK;
return result;
}
这样,我们的 ops 函数就写好了。然后,需要实现一个设备接口的结构体 ops 存储上面的接口函数:
static struct rt_sensor_ops sensor_ops =
{
ds18b20_fetch_data,
ds18b20_control
};
这样一来, ops 接口就对接成功了。
传感器设备注册
完成 Sensor 的 ops 的对接之后还要注册一个 Sensor 设备,这样上层才能找到这个传感器设备,进而进行控制。
设备的注册一共需要下面几步:
- 创建一个
rt_sensor_t的结构体指针 - 为结构体分配内存
- 完成相关初始化
具体的,放到 ds18b20 上面来,具体实现如下:
int rt_hw_ds18b20_init(const char *name, struct rt_sensor_config *cfg)
{
rt_int8_t result;
rt_sensor_t sensor_temp = RT_NULL;
if (!ds18b20_init((rt_base_t)cfg->intf.user_data))
{
/* temperature sensor register */
sensor_temp = rt_calloc(1, sizeof(struct rt_sensor_device));
if (sensor_temp == RT_NULL)
return -1;
sensor_temp->info.type = RT_SENSOR_CLASS_TEMP;
sensor_temp->info.vendor = RT_SENSOR_VENDOR_DALLAS;
sensor_temp->info.model = "ds18b20";
sensor_temp->info.unit = RT_SENSOR_UNIT_DCELSIUS;
sensor_temp->info.intf_type = RT_SENSOR_INTF_ONEWIRE;
sensor_temp->info.range_max = SENSOR_TEMP_RANGE_MAX;
sensor_temp->info.range_min = SENSOR_TEMP_RANGE_MIN;
sensor_temp->info.period_min = 5;
rt_memcpy(&sensor_temp->config, cfg, sizeof(struct rt_sensor_config));
sensor_temp->ops = &sensor_ops;
result = rt_hw_sensor_register(sensor_temp, name, RT_DEVICE_FLAG_RDONLY, RT_NULL);
if (result != RT_EOK)
{
LOG_E("device register err code: %d", result);
goto __exit;
}
}
return RT_EOK;
__exit:
if (sensor_temp)
rt_free(sensor_temp);
return -RT_ERROR;
}
我们来解读一下
传感器设备注册的第一步:创建一个 rt_sensor_t 的结构体指针,上述代码中是这么实现的:
rt_sensor_t sensor_temp = RT_NULL;
传感器设备注册的第二步:为结构体分配内存,上述代码中是这么实现的:
sensor_temp = rt_calloc(1, sizeof(struct rt_sensor_device));
if (sensor_temp == RT_NULL)
return -1;
传感器设备注册的第三步:完成相关初始化,上述代码中是这么实现的:
sensor_temp->info.type = RT_SENSOR_CLASS_TEMP;
sensor_temp->info.vendor = RT_SENSOR_VENDOR_DALLAS;
sensor_temp->info.model = "ds18b20";
sensor_temp->info.unit = RT_SENSOR_UNIT_DCELSIUS;
sensor_temp->info.intf_type = RT_SENSOR_INTF_ONEWIRE;
sensor_temp->info.range_max = SENSOR_TEMP_RANGE_MAX;
sensor_temp->info.range_min = SENSOR_TEMP_RANGE_MIN;
sensor_temp->info.period_min = 5;
rt_memcpy(&sensor_temp->config, cfg, sizeof(struct rt_sensor_config));
sensor_temp->ops = &sensor_ops;
传感器设备注册的三个步骤完成之后,就可以放心大胆地注册传感器设备了,上述代码中是这么实现的:
rt_hw_sensor_register(sensor_temp, name, RT_DEVICE_FLAG_RDONLY, RT_NULL);
上述的 “ops 接口对接” 和 “传感器设备注册” 两个工作完成后,就可以通过 Sensor 框架中的上层接口 open/close/read/write/control,对 ds18b20 进行操作了。
先不着急,我们在 FinSH 中输入 list_device 命令查看 ds18b20 温度传感器是否真的已经被注册上去了。
关于设备名称
在本示例代码中,温度传感器初始化时传入的设备名称为 ds18b20,如下所示:
static int rt_hw_ds18b20_port(void)
{
struct rt_sensor_config cfg;
cfg.intf.user_data = (void *)DS18B20_DATA_PIN;
rt_hw_ds18b20_init("ds18b20", &cfg);
return RT_EOK;
}
INIT_ENV_EXPORT(rt_hw_ds18b20_port);
而 rt_device_find 查找设备时使用的却是 temp_ds18b20。这是因为 Sensor 框架会根据不同的传感器类型,会为其添加一个前缀,对于温度传感器则添加 temp_。在 components/drivers/sensors/sensor.c 有如下代码:
static char *const sensor_name_str[] =
{
"none",
"acce_", /* Accelerometer */
"gyro_", /* Gyroscope */
"mag_", /* Magnetometer */
"temp_", /* Temperature */
"humi_", /* Relative Humidity */
"baro_", /* Barometer */
"li_", /* Ambient light */
"pr_", /* Proximity */
"hr_", /* Heart Rate */
"tvoc_", /* TVOC Level */
"noi_", /* Noise Loudness */
"step_", /* Step sensor */
"forc_" /* Force sensor */
};
关中断读取数据
为了提高软件可靠性,在 ds18b20_get_temperature 函数中调用底层接口读取温度数据时,增加了关中断操作,如下:
int32_t ds18b20_get_temperature(rt_base_t pin)
{
uint8_t TL, TH;
int32_t tem;
rt_ubase_t level;
ds18b20_start(pin);
ds18b20_init(pin);
level = rt_hw_interrupt_disable(); /* Disable global interrupt */
ds18b20_write_byte(pin, 0xcc);
ds18b20_write_byte(pin, 0xbe);
TL = ds18b20_read_byte(pin); /* LSB first */
TH = ds18b20_read_byte(pin);
rt_hw_interrupt_enable(level); /* Enable global interrupt */
...
}
在线程中读取温度数据
我们通过一个线程,去实时获取 ds18b20 的温度数据。
线程的基本操作有:
- 创建/初始化(
rt_thread_create/rt_thread_init) - 启动(
rt_thread_startup) - 运行(
rt_thread_delay/rt_thread_control) - 删除/脱离(
rt_thread_delete/rt_thread_detach)
之前我们已经将 ds18b20 对接到 ops 接口并成功注册成传感器设备了,接下来就可以利用 Sensor 框架的上层接口 open/close/read/write/control 对 ds18b20 进行操作了。
在 main 函数中创建一个读取 ds18b20 温度数据的线程并启动它,线程入口函数是 read_temp_entry:
rt_thread_t ds18b20_thread, led_thread;
ds18b20_thread = rt_thread_create("18b20tem",
read_temp_entry,
"temp_ds18b20",
512,
RT_THREAD_PRIORITY_MAX / 2,
20);
if (ds18b20_thread != RT_NULL) {
rt_thread_startup(ds18b20_thread);
}
在线程入口函数 read_temp_entry 中,我们通过几个步骤,就可以读取 ds18b20 的温度数据了:
- 创建一个
rt_sensor_data的数据结构体 - 查找传感器设备驱动
- 打开对应的传感器设备
- 读取传感器设备数据
上述步骤具体实现如下:
static void read_temp_entry(void *parameter)
{
rt_device_t dev = RT_NULL;
struct rt_sensor_data sensor_data;
rt_size_t res;
dev = rt_device_find(parameter);
if (dev == RT_NULL) {
rt_kprintf("Can't find device:%s\n", parameter);
return;
}
if (rt_device_open(dev, RT_DEVICE_FLAG_RDWR) != RT_EOK) {
rt_kprintf("open device failed!\n");
return;
}
rt_device_control(dev, RT_SENSOR_CTRL_SET_ODR, (void *)100);
while (1) {
res = rt_device_read(dev, 0, &sensor_data, 1);
if (res != 1) {
rt_kprintf("read data failed!size is %d\n", res);
rt_device_close(dev);
return;
} else {
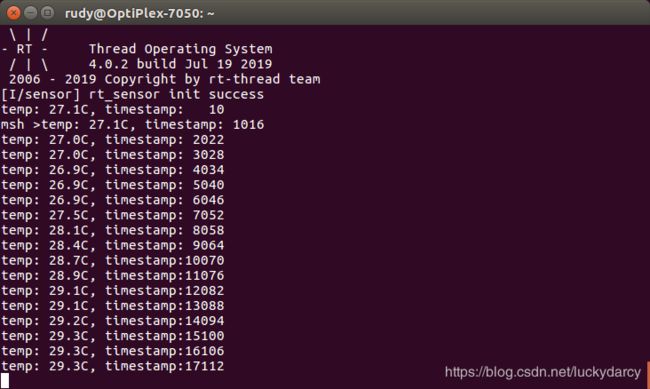
rt_kprintf("temp:%3d.%dC, timestamp:%5d\n",
sensor_data.data.temp / 10,
sensor_data.data.temp % 10,
sensor_data.timestamp);
}
rt_thread_mdelay(100);
}
}
通过 FinSH 控制台,查看该线程源源不断输出的数据: