YOLOv4: 43mAP/83FPS,虽迟但到,大型调优现场 | 论文速递
YOLOv4在速度和准确率上都十分优异,作者使用了大量的trick,论文也写得很扎实,在工程还是学术上都有十分重要的意义,既可以学习如何调参,也可以了解目标检测的SOTA trick
来源:晓飞的算法工程笔记 公众号
论文: YOLOv4: Optimal Speed and Accuracy of Object Detection
论文地址:https://arxiv.org/abs/2004.10934
论文代码:https://github.com/AlexeyAB/darknet
Introduction
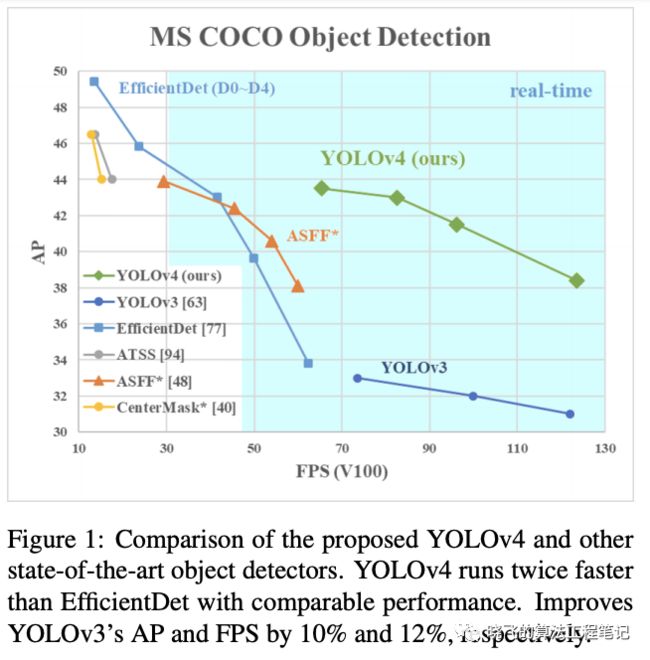
论文提出YOLOv4,从图1的结果来看,相对于YOLOv3在准确率上提升了近10个点,然而速度并几乎没有下降,论文主要贡献如下:
提出速度更快、精度更好的检测模型,仅需要单张1080Ti或2080Ti即可完成训练。
验证了目前SOTA的Bag-ofFreebies(不增加推理成本的trick)和Bag-of-Specials(增加推理成本的trick)的有效性。
修改了SOTA方法,让其更高效且更合适地在单卡进行训练,包括CBN、PAN、SAM等。
Methodology
Selection of architecture
对检测模型来说,分类最优的主干网络不一定是最合适的,适用于目标检测的主干网络需满足以下要求:
高输入分辨率,提高小物体的检测准确率。
更多的层,提高感受域来适应输入的增加。
更多的参数,提高检测单图多尺寸目标的能力。

理论来讲,应该选择感受域更大且参数了更大的模型作为主干网络,表1对比了三种SOTA主干网络的,可以看到CSPDarknet53的感受域、参数量以及速度都是最好的,故选其为主干网络。
另外,使用不同大小的感受域有以下好处:
匹配物体大小,可以观察完整的物体。
匹配网络大小,可以观察物体的上下文信息。
超过网络的大小,增加点与最终激活之间的连接数。
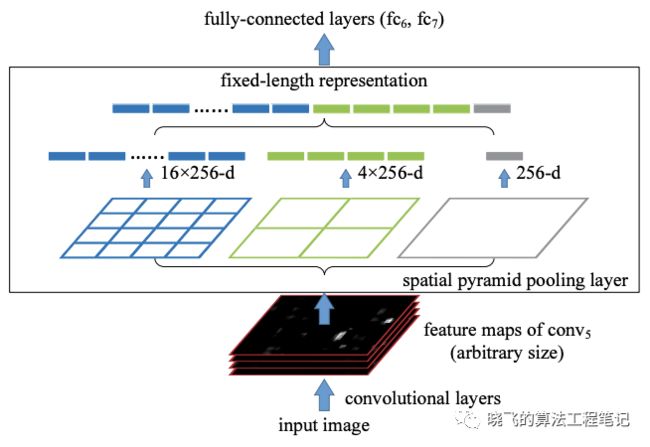
为此,YOLOv4加入了SPP block,能够显著地改善感受域大小,而且速度几乎没有什么下降。
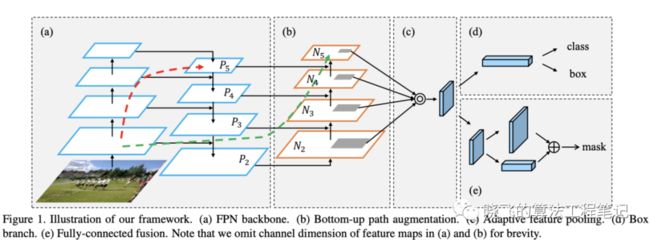
另外,使用PANet替换FPN来进行多通道特征的融合。
最终,YOLOv4选择CSPDarknet53作为主干网络,配合SPP模块,PANet通道融合以及YOLOv3的anchor based head。
Selection of BoF and BoS
目前比较有效的目标检测提升的trick:
激活函数: ReLU, leaky-ReLU, parametric-ReLU, ReLU6, SELU, Swish, or Mish。
bbox回归损失: MSE, IoU, GIoU, CIoU, DIoU
数据增强: CutOut, MixUp, CutMix
正则化方法: DropOut, DropPath, Spatial DropOut, or DropBlock
归一化方法: Batch Normalization(BN), Cross-GPU Batch Normalization(CGBN or SyncBN), Filter Response Normalization (FRN), or Cross-Iteration Batch Normalization(CBN)
由于PReLU和SELU难以训练,并且ReLU6是专门为量化网络设计的,从激活函数中去除这几种。而在正则化方法中,DropBlock的效果是最优的。对于归一化方法的选择,由于需要单卡训练,因此不考虑SyncBN。
Additional improvements
为了让模型能更好地在单卡进行训练,做了以下的改进:
提出新的数据增强方法Mosaic和Self-Adversarial Training (SAT)。
使用遗传算法选择最优的超参数。
修改目前的方法来让训练和检测更有效,包括改进的SAM,改进的PAN以及 Cross mini-Batch Normalization (CmBN)
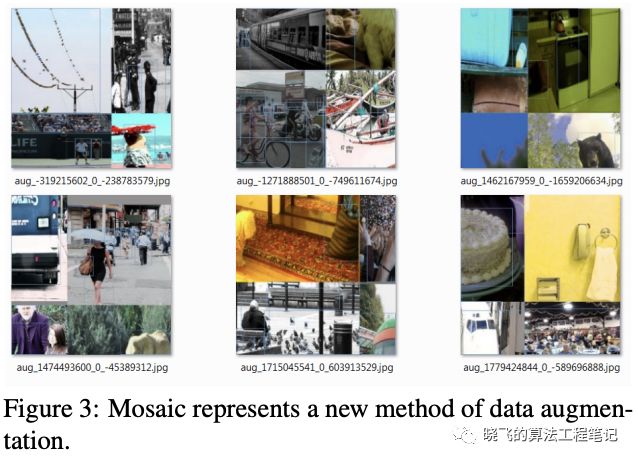
Mosaic是新的数据增强方法,同时融合4张训练图片,CutMix仅融合2张图片,使得目标的检测范围超出其正常的上下文,另外BN每次统计4张图片,这能显著地减少对大mini-batch的需要。
Self-Adversarial Training(SAT)也提供新的数据增强手段,分为两个前向反向阶段。在第一阶段,先对图片进行前向计算,然后通过反向传播修改图片的像素,注意这里不修改网络的权重,通过这种方式,网络进行了一次对抗式训练,制造出没有目标的假象。在第二阶段,对修改后的图片进行正常的训练。
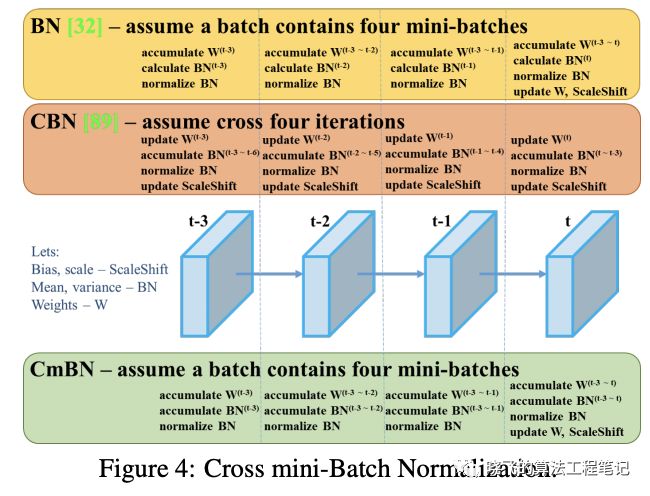
CmBN是改进版的CBN,仅统计single-batch中的mini-batch,如图4所示,假设t-3~t为single-batch中的mini-batch,若干single-batch中包含单个mini-batch,则CmBN与BN一样。
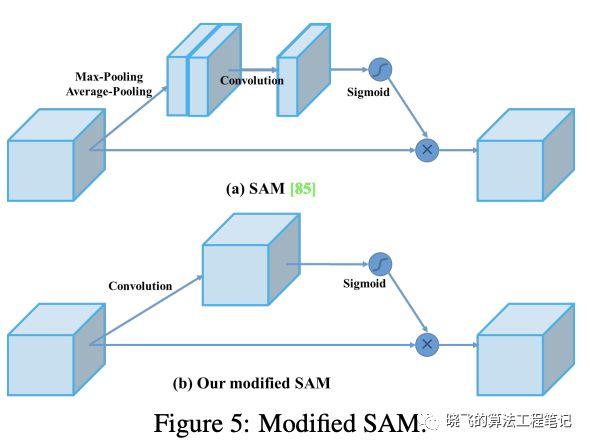
将SAM从spitial-wise attention修改为point-wise attention,即输入和输出的大小一致。
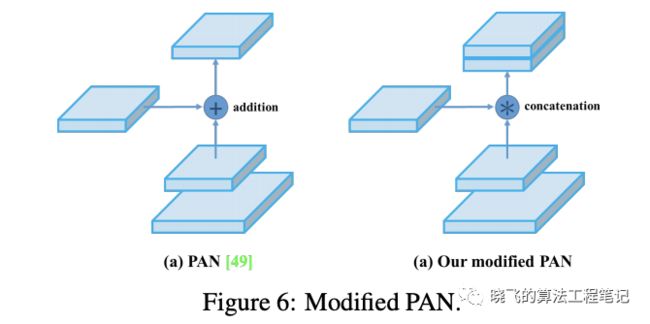
将PAN的shortcut连接方法,从相加改为concate。
YOLOv4
YOLOv4包含:
Backbone:CSPDarknet53
Neck:SPP,PAN
Head:YOLOv3
YOLO v4使用:
主干网络的BoF(Bag of Freebies):CutMix和Mosaic数据增强, DropBlock正则化, 标签平滑(Class label smoothing)
主干网络的BoS(Bag of Specials):Mish激活, Cross-stage partial connections (CSPNet), Multiinput weighted residual connections(MiWRC)
检测端的BoF(Bag of Freebies):CIoU-loss, CmBN, DropBlock正则化, Mosaic数据增强, Self-Adversarial Training, 去除边框敏感性(Eliminate grid sensitivity,见实验部分的解释), 多anchor回归(之前只选最大的), 余弦退火学习率调整(Cosine annealing scheduler), 使用遗传算法最优化超参数, 随机输入大小
检测端的BoS(Bag of Specials):Mish激活, SPP-block, SAM-block, PAN通道融合, DIoU-NMS
Experiments
Influence of different features on Classifier training

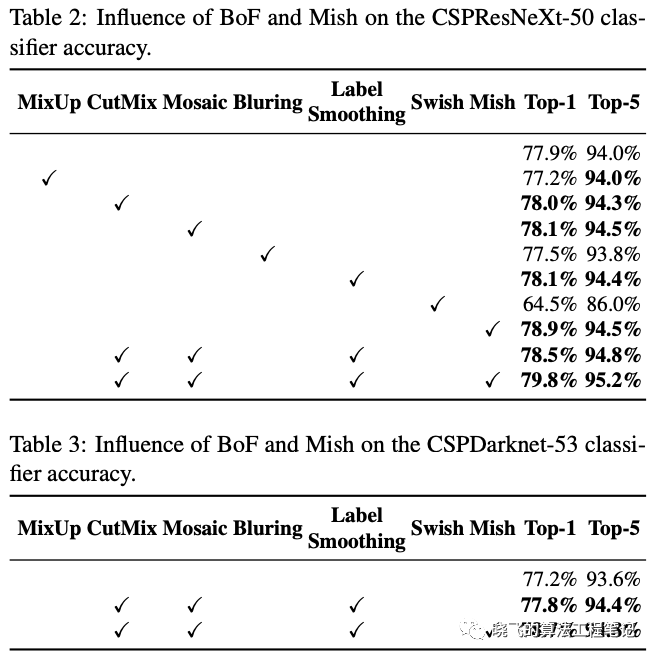
CutMix、Mosaic数据增强和标签平衡(Class label smoothing)比较有效。
Influence of different features on Detector training

表4对比的BoF如下:
S:去除边框敏感性, ,之前的中心点回归与anchor的边相关,当需要趋近 或 时,需要很大的 ,为此对sigmoid添加一个大于1的因子来减少这个影响
M:Mosaic数据增强
IT:IoU阈值,使用大于IoU阈值的anchor进行训练,之前好像只选最大的
GA:使用遗传算法进行最优超参选择
LS:标签平滑
CNB:论文提出的CmBN
CA:使用余弦退火(Cosine annealing scheduler)进行学习率下降
DM:动态mini-batch大小,小分辨率时增加mini-batch
OA:使用最优的anchors
GIoU, CIoU, DIoU, MSE:bbox损失函数
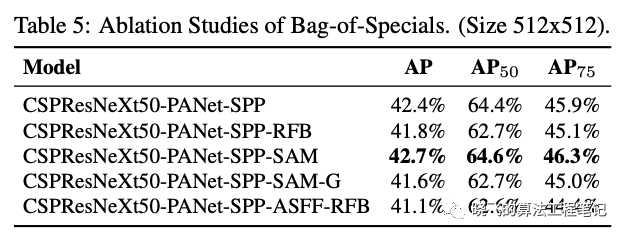
论文也对比了检测端的BoS,从结果来看,SPP、PAN和SAM同时使用时效果最好。
Influence of different backbones and pretrained weightings on Detector training
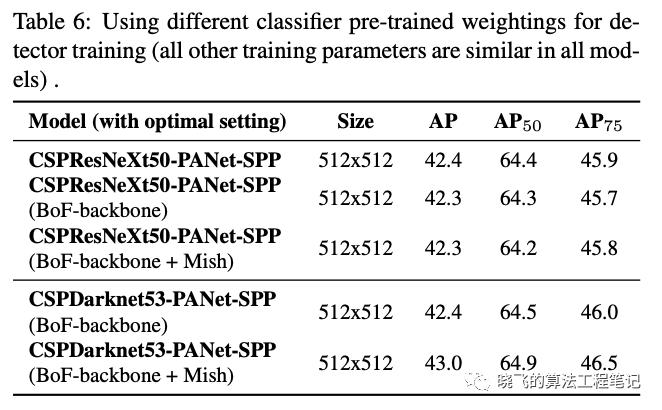
论文研究了不同主干网络对检测准确率的影响,可以看到CSPDarknet53能更好地适应各种改进。
Influence of different mini-batch size on Detector training
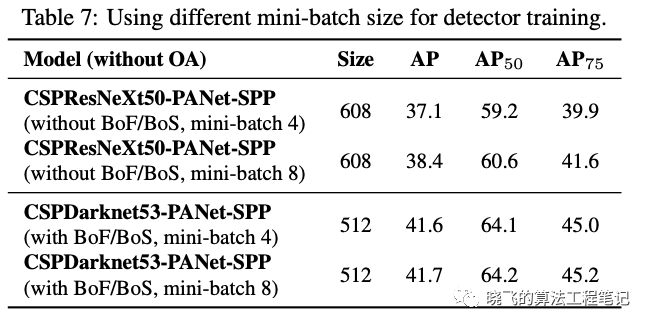
论文对比了不同的mini-batch大小下的检测准确率,在加入BoF和BoS训练策略后,mini-batch的改变几乎对准确率没有影响。
Results
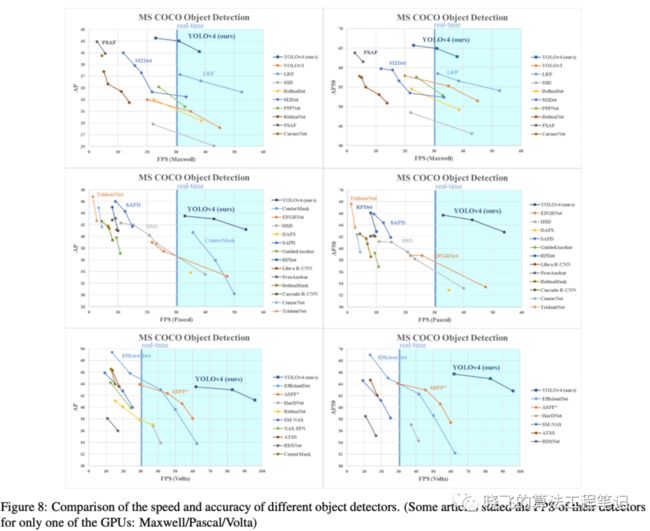
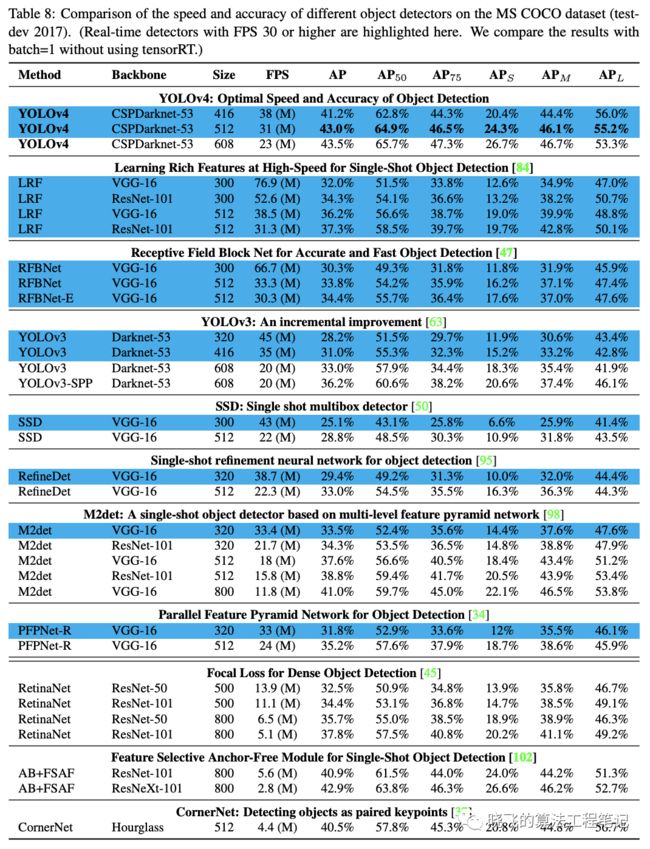
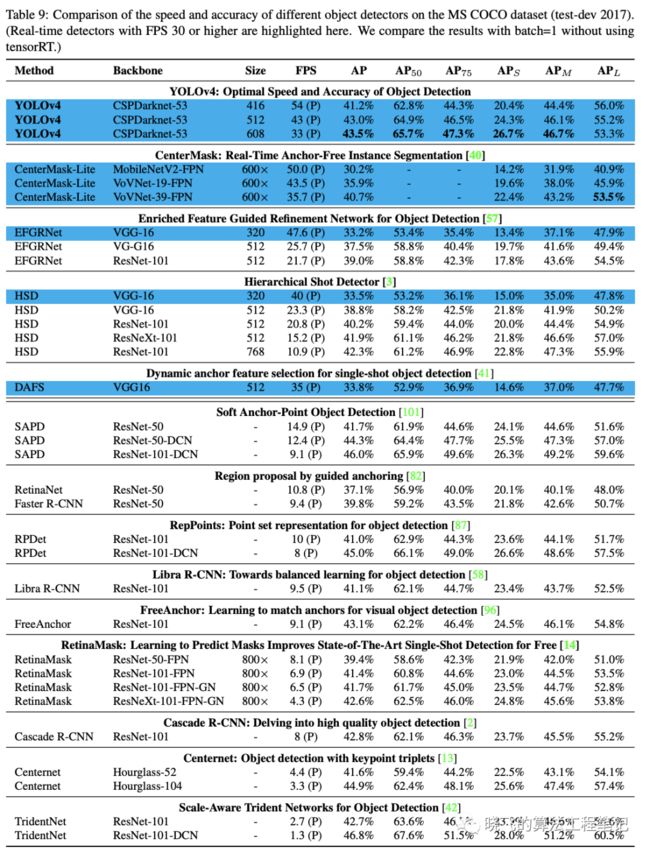
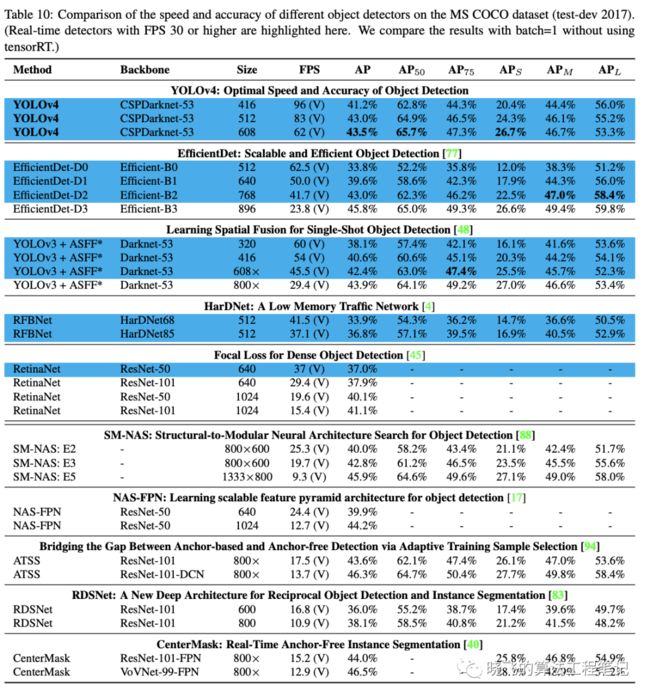
表8、9和10分别为Maxwell GPU、Pascal GPU和Volta GPU上的实验结果,从大量的实验对比来看,YOLOv4在速度和准确率上都十分耐看。
CONCLUSION
YOLOv4在速度和准确率上都十分优异,作者使用了大量的trick,论文也写得很扎实,在工程还是学术上都有十分重要的意义,既可以学习如何调参,也可以了解目标检测的SOTA trick。
目标检测系列秘籍一:模型加速之轻量化网络秘籍二:非极大值抑制及回归损失优化秘籍三:多尺度检测秘籍四:数据增强秘籍五:解决样本不均衡问题秘籍六:Anchor-Free视觉注意力机制系列Non-local模块与Self-attention之间的关系与区别?视觉注意力机制用于分类网络:SENet、CBAM、SKNetNon-local模块与SENet、CBAM的融合:GCNet、DANetNon-local模块如何改进?来看CCNet、ANN
语义分割系列一篇看完就懂的语义分割综述最新实例分割综述:从Mask RCNN 到 BlendMask超强视频语义分割算法!基于语义流快速而准确的场景解析CVPR2020 | HANet:通过高度驱动的注意力网络改善城市场景语义分割
基础积累系列卷积神经网络中的感受野怎么算?
图片中的绝对位置信息,CNN能搞定吗?理解计算机视觉中的损失函数深度学习相关的面试考点总结
自动驾驶学习笔记系列 Apollo Udacity自动驾驶课程笔记——高精度地图、厘米级定位 Apollo Udacity自动驾驶课程笔记——感知、预测 Apollo Udacity自动驾驶课程笔记——规划、控制自动驾驶系统中Lidar和Camera怎么融合?
竞赛与工程项目分享系列如何让笨重的深度学习模型在移动设备上跑起来基于Pytorch的YOLO目标检测项目工程大合集目标检测应用竞赛:铝型材表面瑕疵检测基于Mask R-CNN的道路物体检测与分割
SLAM系列视觉SLAM前端:视觉里程计和回环检测视觉SLAM后端:后端优化和建图模块视觉SLAM中特征点法开源算法:PTAM、ORB-SLAM视觉SLAM中直接法开源算法:LSD-SLAM、DSO视觉SLAM中特征点法和直接法的结合:SVO
2020年最新的iPad Pro上的激光雷达是什么?来聊聊激光SLAM