2014.4新版uboot启动流程分析
最近开始接触uboot,现在需要将2014.4版本uboot移植到公司armv7开发板。
在网上搜索讲uboot启动过程的文章,大多都是比较老版本的uboot,于是决定将新版uboot启动过程记录下来,和大家共享。
对于uboot,我写了一个专栏来记录我的一些理解,感兴趣的朋友可以点击以下链接:
u-boot学习笔记
辛苦之作,大家共享,转载还请注明出处!
Author : kerneler
Email :[email protected]
#
# (C) Copyright 2000-2013
# Wolfgang Denk, DENX Software Engineering, [email protected].
#
# SPDX-License-Identifier: GPL-2.0+
#
VERSION = 2014
PATCHLEVEL = 04
SUBLEVEL =
EXTRAVERSION =
NAME =
到我写这篇文章之时,这个版本的uboot是最新版本。
2014.4版本uboot启动至命令行几个重要函数为:_start,_main,board_init_f,relocate_code,board_init_r。
一 _start
对于任何程序,入口函数是在链接时决定的,uboot的入口是由链接脚本决定的。uboot下armv7链接脚本默认目录为arch/arm/cpu/u-boot.lds。这个可以在配置文件中与CONFIG_SYS_LDSCRIPT来指定。
入口地址也是由连接器决定的,在配置文件中可以由CONFIG_SYS_TEXT_BASE指定。这个会在编译时加在ld连接器的选项-Ttext中
uboot的配置编译原理也非常值得学习,我想在另外写一篇文章来记录,这里不详细说了。
查看u-boot.lds
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
. = ALIGN(4);
.text :
{
*(.__image_copy_start)
CPUDIR/start.o (.text*)
*(.text*)
}
. = ALIGN(4);
.rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) }
. = ALIGN(4);
.data : {
*(.data*)
} _start在arch/arm/cpu/armv7/start.S中,一段一段的分析,如下:
.globl _start
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
#ifdef CONFIG_SPL_BUILD
_undefined_instruction: .word _undefined_instruction
_software_interrupt: .word _software_interrupt
_prefetch_abort: .word _prefetch_abort
_data_abort: .word _data_abort
_not_used: .word _not_used
_irq: .word _irq
_fiq: .word _fiq
_pad: .word 0x12345678 /* now 16*4=64 */
#else
.globl _undefined_instruction
_undefined_instruction: .word undefined_instruction
.globl _software_interrupt
_software_interrupt: .word software_interrupt
.globl _prefetch_abort
_prefetch_abort: .word prefetch_abort
.globl _data_abort
_data_abort: .word data_abort
.globl _not_used
_not_used: .word not_used
.globl _irq
_irq: .word irq
.globl _fiq
_fiq: .word fiq
_pad: .word 0x12345678 /* now 16*4=64 */
#endif /* CONFIG_SPL_BUILD */
.global _end_vect
_end_vect:
.balignl 16,0xdeadbeef
以上代码是设置arm的异常向量表,arm异常向量表如下:
地址 |
异常 |
进入模式 |
描述 |
0x00000000 |
复位 |
管理模式 |
复位电平有效时,产生复位异常,程序跳转到复位处理程序处执行 |
0x00000004 |
未定义指令 |
未定义模式 |
遇到不能处理的指令时,产生未定义指令异常 |
0x00000008 |
软件中断 |
管理模式 |
执行SWI指令产生,用于用户模式下的程序调用特权操作指令 |
0x0000000c |
预存指令 |
中止模式 |
处理器预取指令的地址不存在,或该地址不允许当前指令访问,产生指令预取中止异常 |
0x00000010 |
数据操作 |
中止模式 |
处理器数据访问指令的地址不存在,或该地址不允许当前指令访问时,产生数据中止异常 |
0x00000014 |
未使用 |
未使用 |
未使用 |
0x00000018 |
IRQ |
IRQ |
外部中断请求有效,且CPSR中的I位为0时,产生IRQ异常 |
0x0000001c |
FIQ |
FIQ |
快速中断请求引脚有效,且CPSR中的F位为0时,产生FIQ异常 |
后面汇编是定义了7种异常的入口函数,这里没有定义CONFIG_SPL_BUILD,所以走后面一个。
接下来定义的_end_vect中用.balignl来指定接下来的代码要16字节对齐,空缺的用0xdeadbeef,方便更加高效的访问内存。接着分析下面一段代码
#ifdef CONFIG_USE_IRQ
/* IRQ stack memory (calculated at run-time) */
.globl IRQ_STACK_START
IRQ_STACK_START:
.word 0x0badc0de
/* IRQ stack memory (calculated at run-time) */
.globl FIQ_STACK_START
FIQ_STACK_START:
.word 0x0badc0de
#endif
/* IRQ stack memory (calculated at run-time) + 8 bytes */
.globl IRQ_STACK_START_IN
IRQ_STACK_START_IN:
.word 0x0badc0de
如果uboot中使用中断,这里声明中断处理函数栈起始地址,这里给出的值是0x0badc0de,是一个非法值,注释也说明了,这个值会在运行时重新计算,我查找了一下代码是在interrupt_init中。
reset:
bl save_boot_params
/*
* disable interrupts (FIQ and IRQ), also set the cpu to SVC32 mode,
* except if in HYP mode already
*/
mrs r0, cpsr
and r1, r0, #0x1f @ mask mode bits
teq r1, #0x1a @ test for HYP mode
bicne r0, r0, #0x1f @ clear all mode bits
orrne r0, r0, #0x13 @ set SVC mode
orr r0, r0, #0xc0 @ disable FIQ and IRQ
msr cpsr,r0
/*************************************************************************
*
* void save_boot_params(u32 r0, u32 r1, u32 r2, u32 r3)
* __attribute__((weak));
*
* Stack pointer is not yet initialized at this moment
* Don't save anything to stack even if compiled with -O0
*
*************************************************************************/
ENTRY(save_boot_params)
bx lr @ back to my caller
ENDPROC(save_boot_params)
.weak save_boot_params
这里值得注意的是.weak关键字,在网上找了到的解释,我的理解是.weak相当于声明一个函数,如果该函数在其他地方没有定义,则为空函数,有定义则调用该定义的函数。
具体解释可以看这位大神的详解:
http://blog.csdn.net/norains/article/details/5954459
接下来reset执行7条指令,修改cpsr寄存器,设置处理器进入svc模式,并且关掉irq和fiq。
/*
* Setup vector:
* (OMAP4 spl TEXT_BASE is not 32 byte aligned.
* Continue to use ROM code vector only in OMAP4 spl)
*/
#if !(defined(CONFIG_OMAP44XX) && defined(CONFIG_SPL_BUILD))
/* Set V=0 in CP15 SCTRL register - for VBAR to point to vector */
mrc p15, 0, r0, c1, c0, 0 @ Read CP15 SCTRL Register
bic r0, #CR_V @ V = 0
mcr p15, 0, r0, c1, c0, 0 @ Write CP15 SCTRL Register
/* Set vector address in CP15 VBAR register */
ldr r0, =_start
mcr p15, 0, r0, c12, c0, 0 @Set VBAR
#endif
/* the mask ROM code should have PLL and others stable */
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
bl cpu_init_cp15
bl cpu_init_crit
#endif
bl _main
前面6条汇编指令是对协处理器cp15进行操作,设置了处理器的异常向量入口地址为_start,
这里需要注意,ARM默认的异常向量表入口在0x0地址,uboot的运行介质(norflash nandflash sram等)映射地址可能不在0x0起始的地址,所以需要修改异常向量表入口。
但是我在网上没有找到cp15协处理器的c12寄存器的说明,可能是armv7新添加的
协处理器cp15的说明可以看我转的一篇文章:
http://blog.csdn.net/skyflying2012/article/details/25823967
接下来如果没有定义宏CONFIG_SKIP_LOWLEVEL_INIT,则会分别跳转执行cpu_init_cp15以及cpu_init_crit。
在分析这2个函数之前先总结一下上面分析的这一段_start中汇编的作用:
1 初始化异常向量表 2 设置cpu svc模式,关中断 3 配置cp15,设置异常向量入口
都是跟异常有关的部分。
接下来先分析cpu_init_cp15
/*************************************************************************
*
* cpu_init_cp15
*
* Setup CP15 registers (cache, MMU, TLBs). The I-cache is turned on unless
* CONFIG_SYS_ICACHE_OFF is defined.
*
*************************************************************************/
ENTRY(cpu_init_cp15)
/*
* Invalidate L1 I/D
*/
mov r0, #0 @ set up for MCR
mcr p15, 0, r0, c8, c7, 0 @ invalidate TLBs
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
mcr p15, 0, r0, c7, c5, 6 @ invalidate BP array
mcr p15, 0, r0, c7, c10, 4 @ DSB
mcr p15, 0, r0, c7, c5, 4 @ ISB
/*
* disable MMU stuff and caches
*/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002000 @ clear bits 13 (--V-)
bic r0, r0, #0x00000007 @ clear bits 2:0 (-CAM)
orr r0, r0, #0x00000002 @ set bit 1 (--A-) Align
orr r0, r0, #0x00000800 @ set bit 11 (Z---) BTB
#ifdef CONFIG_SYS_ICACHE_OFF
bic r0, r0, #0x00001000 @ clear bit 12 (I) I-cache
#else
orr r0, r0, #0x00001000 @ set bit 12 (I) I-cache
#endif
mcr p15, 0, r0, c1, c0, 0
#ifdef CONFIG_ARM_ERRATA_716044
mrc p15, 0, r0, c1, c0, 0 @ read system control register
orr r0, r0, #1 << 11 @ set bit #11
mcr p15, 0, r0, c1, c0, 0 @ write system control register
#endif
#if (defined(CONFIG_ARM_ERRATA_742230) || defined(CONFIG_ARM_ERRATA_794072))
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 4 @ set bit #4
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_743622
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 6 @ set bit #6
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_751472
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 11 @ set bit #11
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_761320
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 21 @ set bit #21
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
mov pc, lr @ back to my caller
ENDPROC(cpu_init_cp15)具体配置过程可以对照cp15寄存器来看,这里不详细说了
接下来看cpu_init_crit
/*************************************************************************
*
* CPU_init_critical registers
*
* setup important registers
* setup memory timing
*
*************************************************************************/
ENTRY(cpu_init_crit)
/*
* Jump to board specific initialization...
* The Mask ROM will have already initialized
* basic memory. Go here to bump up clock rate and handle
* wake up conditions.
*/
b lowlevel_init @ go setup pll,mux,memory
ENDPROC(cpu_init_crit)
看注释可以明白,cpu_init_crit调用的lowlevel_init函数是与特定开发板相关的初始化函数,在这个函数里会做一些pll初始化,如果不是从mem启动,则会做memory初始化,方便后续拷贝到mem中运行。
lowlevel_init函数则是需要移植来实现,做clk初始化以及ddr初始化
从cpu_init_crit返回后,_start的工作就完成了,接下来就要调用_main,总结一下_start工作:
1 前面总结过的部分,初始化异常向量表,设置svc模式,关中断
2 配置cp15,初始化mmu cache tlb
3 板级初始化,pll memory初始化
二 _main
_main函数在arch/arm/lib/crt0.S中,mian函数的作用在注释中有详细的说明,我们分段来分析一下
ENTRY(_main)
/*
* Set up initial C runtime environment and call board_init_f(0).
*/
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr sp, =(CONFIG_SPL_STACK)
#else
ldr sp, =(CONFIG_SYS_INIT_SP_ADDR)
#endif
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
sub sp, sp, #GD_SIZE /* allocate one GD above SP */
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
mov r9, sp /* GD is above SP */
mov r0, #0
bl board_init_f
首先将CONFIG_SYS_INIT_SP_ADDR定义的值加载到栈指针sp中,这个宏定义在配置头文件中指定。
这段代码是为board_init_f C函数调用提供环境,也就是栈指针sp初始化
8字节对齐,然后减掉GD_SIZE,这个宏定义是指的全局结构体gd的大小,是160字节在此处,这个结构体用来保存uboot一些全局信息,需要一块单独的内存。
最后将sp保存在r9寄存器中。因此r9寄存器中的地址就是gd结构体的首地址。
在后面所有code中如果要使用gd结构体,必须在文件中加入DECLARE_GLOBAL_DATA_PTR宏定义,定义如下:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r9")gd结构体首地址就是r9中的值。
C语言函数栈是向下生长,这里sp为malloc空间顶端减去gd bd空间开始的,起初很纳闷,sp设在这里,以后的C函数调用不都会在malloc空间了吗,堆栈空间不就重合了嘛,不用急,看完board_init_f就明白了。
接着说_main上面一段代码,接着r0赋为0,也就是参数0为0,调用board_init_f
三 board_init_f
移植uboot先做一个最精简版本,很多配置选项都没有打开,比如fb mmc等硬件都默认不打开,只配置基本的ddr serial,这样先保证uboot能正常启动进入命令行,然后再去添加其他。
我们这里分析就是按最精简版本来,这样可以更加简洁的说明uboot的启动流程。
board_init_f函数主要是根据配置对全局信息结构体gd进行初始化。
gd结构体中有个别成员意义我也不是很理解,这里我只说我理解并且在后面起到作用的成员。
gd->mon_len = (ulong)&__bss_end - (ulong)_start;
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
init_fnc_t *init_sequence[] = {
arch_cpu_init, /* basic arch cpu dependent setup */
mark_bootstage,
#ifdef CONFIG_OF_CONTROL
fdtdec_check_fdt,
#endif
#if defined(CONFIG_BOARD_EARLY_INIT_F)
board_early_init_f,
#endif
timer_init, /* initialize timer */
#ifdef CONFIG_BOARD_POSTCLK_INIT
board_postclk_init,
#endif
#ifdef CONFIG_FSL_ESDHC
get_clocks,
#endif
env_init, /* initialize environment */
init_baudrate, /* initialze baudrate settings */
serial_init, /* serial communications setup */
console_init_f, /* stage 1 init of console */
display_banner, /* say that we are here */
print_cpuinfo, /* display cpu info (and speed) */
#if defined(CONFIG_DISPLAY_BOARDINFO)
checkboard, /* display board info */
#endif
#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SYS_I2C)
init_func_i2c,
#endif
dram_init, /* configure available RAM banks */
NULL,
};
timer_init在lib/time.c中有实现,也是空函数,但是有__WEAK关键字,如果自己实现,则会调用自己实现的这个函数
对最精简uboot,需要做好就是ddr和serial,所以我们最关心是serial_init,console_init_f以及dram_init.
先看serial_init
int serial_init(void)
{
return get_current()->start();
}
static struct serial_device *get_current(void)
{
struct serial_device *dev;
if (!(gd->flags & GD_FLG_RELOC))
dev = default_serial_console();
else if (!serial_current)
dev = default_serial_console();
else
dev = serial_current;
/* We must have a console device */
if (!dev) {
#ifdef CONFIG_SPL_BUILD
puts("Cannot find console\n");
hang();
#else
panic("Cannot find console\n");
#endif
}
return dev;
}gd->flags还没做初始化,serial_current用来存放我们当前要使用的serial,这里也还没做初始化,所以最终serial_device就是default_serial_console(),这个在serial驱动中有实现,来返回一个默认的调试串口。
serial_device结构体代表了一个串口设备,其中的成员都需要在自己的serial驱动中实现。
这样在serial_init中get_current获取就是串口驱动中给出的默认调试串口结构体,执行start,做一些特定串口初始化。
console_init_f将gd中have_console置1,这个函数不详细说了。
display_banner,print_cpuinfo利用现在的调试串口打印了uboot的信息。
接下来就是dram_init。
dram_init对gd->ram_size初始化,以便board_init_f后面代码对dram空间进行规划。
dram_init实现可以通过配置文件定义宏定义来实现,也可以通过对ddrc控制器读获取dram信息。
继续分析board_init_f,剩余代码将会对sdram空间进行规划!
#if defined(CONFIG_SYS_MEM_TOP_HIDE)
/*
* Subtract specified amount of memory to hide so that it won't
* get "touched" at all by U-Boot. By fixing up gd->ram_size
* the Linux kernel should now get passed the now "corrected"
* memory size and won't touch it either. This should work
* for arch/ppc and arch/powerpc. Only Linux board ports in
* arch/powerpc with bootwrapper support, that recalculate the
* memory size from the SDRAM controller setup will have to
* get fixed.
*/
gd->ram_size -= CONFIG_SYS_MEM_TOP_HIDE;
#endif
addr = CONFIG_SYS_SDRAM_BASE + get_effective_memsize();
addr的值由CONFIG_SYS_SDRAM_BASE加上ram_size。也就是到了可用sdram的顶端。
#if !(defined(CONFIG_SYS_ICACHE_OFF) && defined(CONFIG_SYS_DCACHE_OFF))
/* reserve TLB table */
gd->arch.tlb_size = PGTABLE_SIZE;
addr -= gd->arch.tlb_size;
/* round down to next 64 kB limit */
addr &= ~(0x10000 - 1);
gd->arch.tlb_addr = addr;
debug("TLB table from %08lx to %08lx\n", addr, addr + gd->arch.tlb_size);
#endif
/* round down to next 4 kB limit */
addr &= ~(4096 - 1);
debug("Top of RAM usable for U-Boot at: %08lx\n", addr);
最后addr此时值就是tlb的地址,4kB对齐。
#ifdef CONFIG_LCD
#ifdef CONFIG_FB_ADDR
gd->fb_base = CONFIG_FB_ADDR;
#else
/* reserve memory for LCD display (always full pages) */
addr = lcd_setmem(addr);
gd->fb_base = addr;
#endif /* CONFIG_FB_ADDR */
#endif /* CONFIG_LCD */
/*
* reserve memory for U-Boot code, data & bss
* round down to next 4 kB limit
*/
addr -= gd->mon_len;
addr &= ~(4096 - 1);
debug("Reserving %ldk for U-Boot at: %08lx\n", gd->mon_len >> 10, addr);
gd->fb_base保存fb首地址。
接着-gd->mon_len为uboot的code留出空间,到这里addr的值就确定,addr作为uboot relocate的目标addr。
到这里,可以看出uboot现在空间划分是从顶端往下进行的。
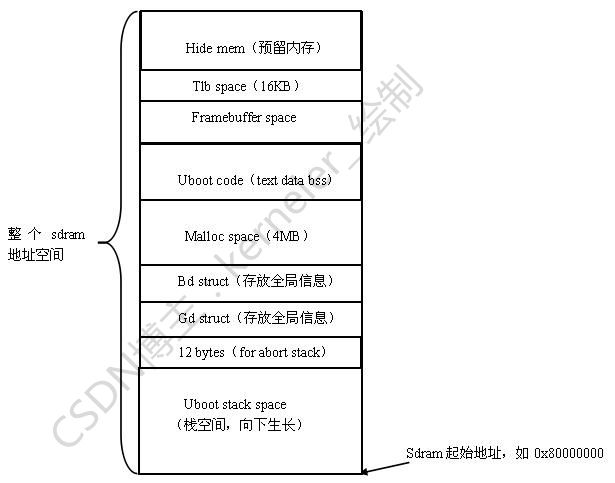
先总结一下addr之上sdram空间的划分:
由高到低 : top-->hide mem-->tlb space(16K)-->framebuffer space-->uboot code space-->addr
接下来要确定addr_sp的值。
#ifndef CONFIG_SPL_BUILD
/*
* reserve memory for malloc() arena
*/
addr_sp = addr - TOTAL_MALLOC_LEN;
debug("Reserving %dk for malloc() at: %08lx\n",
TOTAL_MALLOC_LEN >> 10, addr_sp);
/*
* (permanently) allocate a Board Info struct
* and a permanent copy of the "global" data
*/
addr_sp -= sizeof (bd_t);
bd = (bd_t *) addr_sp;
gd->bd = bd;
debug("Reserving %zu Bytes for Board Info at: %08lx\n",
sizeof (bd_t), addr_sp);
#ifdef CONFIG_MACH_TYPE
gd->bd->bi_arch_number = CONFIG_MACH_TYPE; /* board id for Linux */
#endif
addr_sp -= sizeof (gd_t);
id = (gd_t *) addr_sp;
debug("Reserving %zu Bytes for Global Data at: %08lx\n",
sizeof (gd_t), addr_sp);
#ifndef CONFIG_ARM64
/* setup stackpointer for exeptions */
gd->irq_sp = addr_sp;
#ifdef CONFIG_USE_IRQ
addr_sp -= (CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ);
debug("Reserving %zu Bytes for IRQ stack at: %08lx\n",
CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ, addr_sp);
#endif
/* leave 3 words for abort-stack */
addr_sp -= 12;
/* 8-byte alignment for ABI compliance */
addr_sp &= ~0x07;
#else /* CONFIG_ARM64 */
/* 16-byte alignment for ABI compliance */
addr_sp &= ~0x0f;
#endif /* CONFIG_ARM64 */首先预留malloc len,这里我定义的是0x400000.
注释中说明,为bd,gd做一个永久的copy。
留出了全局信息bd_t结构体的空间,首地址存在gd->bd。
留出gd_t结构体的空间。首地址存在id中。
将此地址保存在gd->irq_sp中作为异常栈指针。uboot中我们没有用到中断。
最后留出12字节,for abort stack,这个没看懂。
到这里addr_sp值确定,总结一下addr_sp之上空间分配。
由高到低 : addr-->malloc len(0x400000)-->bd len-->gd len-->12 byte-->addr_sp(栈往下增长,addr_sp之下空间作为栈空间)
gd->bd->bi_baudrate = gd->baudrate;
/* Ram ist board specific, so move it to board code ... */
dram_init_banksize();
display_dram_config(); /* and display it */
gd->relocaddr = addr;
gd->start_addr_sp = addr_sp;
gd->reloc_off = addr - (ulong)&_start;
debug("relocation Offset is: %08lx\n", gd->reloc_off);
if (new_fdt) {
memcpy(new_fdt, gd->fdt_blob, fdt_size);
gd->fdt_blob = new_fdt;
}
memcpy(id, (void *)gd, sizeof(gd_t));
dram_init_banksize()是需要实现的板级函数。根据板上ddrc获取ddr的bank信息。填充在gd->bd->bi_dram[CONFIG_NR_DRAM_BANKS]。
gd->relocaaddr为目标addr,gd->start_addr_sp为目标addr_sp,gd->reloc_off为目标addr和现在实际code起始地址的偏移。reloc_off非常重要,会作为后面relocate_code函数的参数,来实现code的拷贝。
最后将gd结构体的数据拷贝到新的地址id上。
board_init_f函数将sdram空间重新进行了划分,可以看出栈空间和堆空间是分开的,就不存在_main调用board_init_f之前的那个问题啦。
并且在重新规划空间完成之前并没有出现初始化堆,以及使用堆空间的问题,比如malloc函数,所以之前的堆栈空间重合的问题是过虑了。
至此,board_init_f结束,回到_main
四 _main
board_init_f结束后,代码如下:
#if ! defined(CONFIG_SPL_BUILD)
/*
* Set up intermediate environment (new sp and gd) and call
* relocate_code(addr_moni). Trick here is that we'll return
* 'here' but relocated.
*/
ldr sp, [r9, #GD_START_ADDR_SP] /* sp = gd->start_addr_sp */
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
ldr r9, [r9, #GD_BD] /* r9 = gd->bd */
sub r9, r9, #GD_SIZE /* new GD is below bd */
adr lr, here
ldr r0, [r9, #GD_RELOC_OFF] /* r0 = gd->reloc_off */
add lr, lr, r0
ldr r0, [r9, #GD_RELOCADDR] /* r0 = gd->relocaddr */
b relocate_code
here:
首先更新sp,并且将sp 8字节对齐,方便后面函数开辟栈能对齐,
然后获取gd->bd地址到r9中,需要注意,在board_init_f中gd->bd已经更新为新分配的bd了,下一条汇编将r9减掉bd的size,这样就获取到了board_init_f中新分配的gd了!
后面汇编则是为relocate_code做准备,首先加载here地址,然后加上新地址偏移量给lr,则是code relocate后的新here了,relocate_code返回条转到lr,则是新位置的here!
最后在r0中保存code的新地址,跳转到relocate_code
五 relocate_code
relocate_code函数在arch/arm/lib/relocate.S中,这个函数实现了将uboot code拷贝到relocaddr。
这部分算是整个uboot中最核心也是最难理解的代码,我单独写了一篇文章来介绍这一部分的工作原理,感兴趣的朋友可以看下面这个链接
http://blog.csdn.net/skyflying2012/article/details/37660265
这里就不再详说了。
到这里需要总结一下,经过上面的分析可以看出,
新版uboot在sdram空间分配上,是自顶向下,
不管uboot是从哪里启动,spiflash,nandflash,sram等跑到这里code都会被从新定位到sdram上部的一个位置,继续运行。
我找了一个2010.6版本的uboot大体看了一下启动代码,是通过判断_start和TEXT_BASE(链接地址)是否相等来确定是否需要relocate。如果uboot是从sdram启动则不需要relocate。
新版uboot在这方面还是有较大变动。
这样变动我考虑好处可能有二,一是不用考虑启动方式,all relocate code。二是不用考虑uboot链接地址,因为都要重新relocate。
uboot sdram空间规划图:
六 _main
从relocate_code回到_main中,接下来是main最后一段代码,如下:
/* Set up final (full) environment */
bl c_runtime_cpu_setup /* we still call old routine here */
ldr r0, =__bss_start /* this is auto-relocated! */
ldr r1, =__bss_end /* this is auto-relocated! */
mov r2, #0x00000000 /* prepare zero to clear BSS */
clbss_l:cmp r0, r1 /* while not at end of BSS */
strlo r2, [r0] /* clear 32-bit BSS word */
addlo r0, r0, #4 /* move to next */
blo clbss_l
bl coloured_LED_init
bl red_led_on
/* call board_init_r(gd_t *id, ulong dest_addr) */
mov r0, r9 /* gd_t */
ldr r1, [r9, #GD_RELOCADDR] /* dest_addr */
/* call board_init_r */
ldr pc, =board_init_r /* this is auto-relocated! */
/* we should not return here. */
ENTRY(c_runtime_cpu_setup)
/*
* If I-cache is enabled invalidate it
*/
#ifndef CONFIG_SYS_ICACHE_OFF
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
mcr p15, 0, r0, c7, c10, 4 @ DSB
mcr p15, 0, r0, c7, c5, 4 @ ISB
#endif
/*
* Move vector table
*/
/* Set vector address in CP15 VBAR register */
ldr r0, =_start
mcr p15, 0, r0, c12, c0, 0 @Set VBAR
bx lr
ENDPROC(c_runtime_cpu_setup)
接着更新异常向量表首地址,因为code被relocate,所以异常向量表也被relocate。
从c_runtime_cpu_setup返回,下面一段汇编是将bss段清空。
接下来分别调用了coloured_LED_init以及red_led_on,很多开发板都会有led指示灯,这里可以实现上电指示灯亮,有调试作用。
最后r0赋值gd指针,r1赋值relocaddr,进入最后的board_init_r !
七 board_init_r
参数1是新gd指针,参数2是relocate addr,也就是新code地址
gd->flags |= GD_FLG_RELOC; /* tell others: relocation done */
bootstage_mark_name(BOOTSTAGE_ID_START_UBOOT_R, "board_init_r");
monitor_flash_len = (ulong)&__rel_dyn_end - (ulong)_start;
/* Enable caches */
enable_caches();
debug("monitor flash len: %08lX\n", monitor_flash_len);
board_init(); /* Setup chipselects */
置位gd->flags,标志已经relocate。monitor_flash_len这个变量作用没看懂。使能cache,最后board_init是需要实现的板级支持函数。做开发板的基本初始化。
#ifdef CONFIG_CLOCKS
set_cpu_clk_info(); /* Setup clock information */
#endif
serial_initialize();
debug("Now running in RAM - U-Boot at: %08lx\n", dest_addr);
重点来说一些serial_initialize,对于最精简能正常启动的uboot,serial和ddr是必须正常工作的。
实现在drivers/serial/serial.c中,如下:
void serial_initialize(void)
{
mpc8xx_serial_initialize();
ns16550_serial_initialize();
pxa_serial_initialize();
s3c24xx_serial_initialize();
s5p_serial_initialize();
mpc512x_serial_initialize();。。。。
mxs_auart_initialize();
arc_serial_initialize();
vc0718_serial_initialize();
serial_assign(default_serial_console()->name);
}xxxx_serial_initialize函数中是将所有需要的串口(用结构体struct serial_device表示,其中实现了基本的收 发 配置)调用serial_register注册,serial_register如下:
void serial_register(struct serial_device *dev)
{
#ifdef CONFIG_NEEDS_MANUAL_RELOC
if (dev->start)
dev->start += gd->reloc_off;
if (dev->stop)
dev->stop += gd->reloc_off;
if (dev->setbrg)
dev->setbrg += gd->reloc_off;
if (dev->getc)
dev->getc += gd->reloc_off;
if (dev->tstc)
dev->tstc += gd->reloc_off;
if (dev->putc)
dev->putc += gd->reloc_off;
if (dev->puts)
dev->puts += gd->reloc_off;
#endif
dev->next = serial_devices;
serial_devices = dev;
}可以想象,如果你有4个串口,则再你的串口驱动中分别定义4个serial device,并实现对应的收发配置,然后serial_register注册者4个串口。
回到serial-initialize,最后调用serial_assign,default_serial_console我们之前说过,就是你在串口驱动给出一个默认调试串口,serial_assign如下:
int serial_assign(const char *name)
{
struct serial_device *s;
for (s = serial_devices; s; s = s->next) {
if (strcmp(s->name, name))
continue;
serial_current = s;
return 0;
}
return -EINVAL;
}总结一下,serial_initialize工作是将所有serial驱动中所有串口注册到serial_devices链表中,然后找到指定的默认串口。
/* The Malloc area is immediately below the monitor copy in DRAM */
malloc_start = dest_addr - TOTAL_MALLOC_LEN;
mem_malloc_init (malloc_start, TOTAL_MALLOC_LEN);根据咱们之前board_init_f中的分析,relocate addr之下的部分就是malloc的预留空间了。这里获取malloc首地址malloc_start.
void mem_malloc_init(ulong start, ulong size)
{
mem_malloc_start = start;
mem_malloc_end = start + size;
mem_malloc_brk = start;
memset((void *)mem_malloc_start, 0, size);
malloc_bin_reloc();
}board_init_r接下来的代码是做一些外设的初始化,比如mmc flash eth,环境变量的设置,还有中断的使能等,这里需要说一下是关于串口的2个函数,stdio_init和console_init_r.
看stdio_init代码,我们只定义了serial,会调到serial_stdio_init,如下:
void serial_stdio_init(void)
{
struct stdio_dev dev;
struct serial_device *s = serial_devices;
while (s) {
memset(&dev, 0, sizeof(dev));
strcpy(dev.name, s->name);
dev.flags = DEV_FLAGS_OUTPUT | DEV_FLAGS_INPUT;
dev.start = s->start;
dev.stop = s->stop;
dev.putc = s->putc;
dev.puts = s->puts;
dev.getc = s->getc;
dev.tstc = s->tstc;
stdio_register(&dev);
s = s->next;
}
}可以想象,serial_stdio_init是在drivers/serial/serial.c中实现,uboot在这里是利用的内核分层思想,drivers/serial下是特定serial驱动,分别调用serial_register注册到serial_devices中,这可以说是通用的serial驱动层,
通用serial层调用serial-stdio-init将所有serial注册到stdio device中,这就是通用的stdio层。
看来分层思想还是非常重要的!
board_init_r中调用完stdio_init后又调用了console_init_r,如下
int console_init_r(void)
{
struct stdio_dev *inputdev = NULL, *outputdev = NULL;
int i;
struct list_head *list = stdio_get_list();
struct list_head *pos;
struct stdio_dev *dev;
/* Scan devices looking for input and output devices */
list_for_each(pos, list) {
dev = list_entry(pos, struct stdio_dev, list);
if ((dev->flags & DEV_FLAGS_INPUT) && (inputdev == NULL)) {
inputdev = dev;
}
if ((dev->flags & DEV_FLAGS_OUTPUT) && (outputdev == NULL)) {
outputdev = dev;
}
if(inputdev && outputdev)
break;
}
if (outputdev != NULL) {
console_setfile(stdout, outputdev);
console_setfile(stderr, outputdev);
}
/* Initializes input console */
if (inputdev != NULL) {
console_setfile(stdin, inputdev);
}
#ifndef CONFIG_SYS_CONSOLE_INFO_QUIET
stdio_print_current_devices();
#endif /* CONFIG_SYS_CONSOLE_INFO_QUIET */
/* Setting environment variables */
for (i = 0; i < 3; i++) {
setenv(stdio_names[i], stdio_devices[i]->name);
}
gd->flags |= GD_FLG_DEVINIT; /* device initialization completed */
return 0;
}之后调用console_setfile,如下:
static int console_setfile(int file, struct stdio_dev * dev)
{
int error = 0;
if (dev == NULL)
return -1;
switch (file) {
case stdin:
case stdout:
case stderr:
/* Start new device */
if (dev->start) {
error = dev->start();
/* If it's not started dont use it */
if (error < 0)
break;
}
/* Assign the new device (leaving the existing one started) */
stdio_devices[file] = dev;
/*
* Update monitor functions
* (to use the console stuff by other applications)
*/
switch (file) {
case stdin:
gd->jt[XF_getc] = dev->getc;
gd->jt[XF_tstc] = dev->tstc;
break;
case stdout:
gd->jt[XF_putc] = dev->putc;
gd->jt[XF_puts] = dev->puts;
gd->jt[XF_printf] = printf;
break;
}
break;
default: /* Invalid file ID */
error = -1;
}
return error;
}在console_init_r中最后会改变gd中flag状态,为GD_FLG_DEVINIT。表示设备初始化完成。
board_init_r进行完板级初始化后最后进入死循环,打印命令行,等待命令输入和解析。到这里uboot的启动过程就全部结束了!
上面用很大篇幅自下往上解释uboot下serial到console的架构,那来看一下实际使用时由printf到最后serial输出这个自上到下的流程吧。
首先来看printf,实现在common/console.c中如下:
int printf(const char *fmt, ...)
{
va_list args;
uint i;
char printbuffer[CONFIG_SYS_PBSIZE];
#if !defined(CONFIG_SANDBOX) && !defined(CONFIG_PRE_CONSOLE_BUFFER)
if (!gd->have_console)
return 0;
#endif
va_start(args, fmt);
/* For this to work, printbuffer must be larger than
* anything we ever want to print.
*/
i = vscnprintf(printbuffer, sizeof(printbuffer), fmt, args);
va_end(args);
/* Print the string */
puts(printbuffer);
return i;
}void puts(const char *s)
{
#ifdef CONFIG_SANDBOX
if (!gd) {
os_puts(s);
return;
}
#endif
#ifdef CONFIG_SILENT_CONSOLE
if (gd->flags & GD_FLG_SILENT)
return;
#endif
#ifdef CONFIG_DISABLE_CONSOLE
if (gd->flags & GD_FLG_DISABLE_CONSOLE)
return;
#endif
if (!gd->have_console)
return pre_console_puts(s);
if (gd->flags & GD_FLG_DEVINIT) {
/* Send to the standard output */
fputs(stdout, s);
} else {
/* Send directly to the handler */
serial_puts(s);
}
}gd->have_console在board_init_f的console_init_f中置位,flag的GD_FLG_DEVINIT则是在刚才board_init_r中console_init_r最后置位。
如果GD_FLG_DEVINIT没有置位,表明console没有注册,是在board_init_f之后,board_init_r执行完成之前,这时调用serial_puts,如下:
void serial_puts(const char *s)
{
get_current()->puts(s);
} 直接调到serial.c中的函数,完全符合board_init_f中serial_init的配置,仅仅找到一个默认串口来使用,其他串口暂且不管。
如果GD_FLG_DEVINIT置位,表明console注册完成。调用fputs,如下:
void fputs(int file, const char *s)
{
if (file < MAX_FILES)
console_puts(file, s);
}
static inline void console_puts(int file, const char *s)
{
stdio_devices[file]->puts(s);
}分析后总结一下:
可以看出,对于serial,uboot实现了一个2级初始化:
stage 1,仅初始化default console serial,printf到puts后会直接调用特定串口的puts函数,实现打印
stage 2,将所有serial注册为stdio_device,并挑出指定调试串口作为stdio_devices的stdout stdin stderr。printf到puts后再到全局stdio_devices中找到对应stdio_device,调用stdio-device的puts,最终调用特定serial的puts,实现打印。
区分这2个stage,是利用gd的flag,GD_FLG_DEVINIT。