【实时渲染】一篇文章让你学会做一个软件光栅化渲染器
如果您想更好的理解本文所讲内容,建议您阅读scratchapixel及《3D游戏与计算机图形学中的数学方法》第五章和第七章。
通过本文,您将会实现一个简单的软件光栅化渲染器,并会进一步理解渲染流水线所做的事。本文会通过一个简单的样例介绍以下知识:
1.纹理
2.深度缓冲
3.坐标变换
4.基础光照(漫反射光照,镜面光照,环境光照)。
5.透视校正插值(深度插值,顶点属性插值)
样例效果:

1.样例源码GitHub地址。
2.所需图片地址。
首先是自定义的一些数据
vec2 uv0 = { 0,0 };
vec2 uv1 = { 0,1 };
vec2 uv2 = { 1,1 };
vec2 uv3 = { 1,0 };
vec2 uv4 = { 1,1 };
vec3 v0 = { -48, -48, 0 };
vec3 v1 = { -48, 48, 0 };
vec3 v2 = { 48, 48, 0 };
vec3 v3 = { 48, -48, 0 };
vec3 v4 = { 48, -48, 96 };
vec3 lightpos = { 0,0,100 };
vec3 viewpos = { 0,0,0 };
vec3 lightcolor = { 1,1,1 };
unsigned const int nx = 512, ny = 512;
1.三维数学库
三维数学库总的源码在这里,主要包含三角形结构体(tra),二维、三维、四维向量类,点乘、叉乘、反射、旋转、平移、单位化函数,大部分是比较容易理解的,注意一下向量乘法运算符的重载、反射和旋转。
2判断像素是否在三角形内
float edgeFun(const vec3 &a, const vec3 &b, const vec3 &c)
{
return (c[0] - a[0]) * (b[1] - a[1]) - (c[1] - a[1]) * (b[0] - a[0]);
}
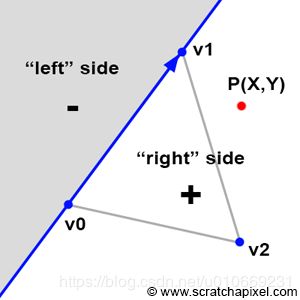
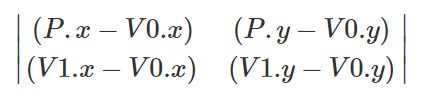
这里采用的是Linear Expression Evaluation方法,简单的说,就是将v0,v1,p的x,y坐标带入下面的这个函数,根据结果判断p点位置:
![]()
1.E(p)>0:p在v0 v1的“右”侧
2.E(p)<0:p在v0 v1的“左”侧
3.E(p)=0:p在v0 v1的边上
此处v0,v1,v2是以顺时针方向排列的,如果以逆时针方向的话则判断方式相反。
其实就是(p-v0)和(v1-v0)向量的叉乘:
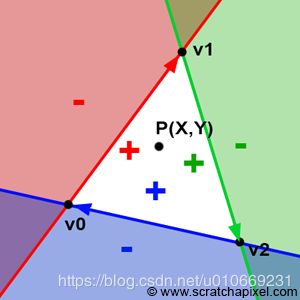
2.通过面积比求顶点属性插值
所以这个函数返回值的模是以(p-v0)和(v1-v0)为邻边的平行四边形的面积,即以v0,v1,v2为顶点的三角形面积的两倍。
对于给定的一个像素位置p(x,y,0),如果其返回值均大于等于零则其位于该三角形内。若已判定p在三角形内,则根据面积比求出w,用于下一步的顶点属性插值。
![]()
透视投影、屏幕映射、深度插值、顶点属性插值
tra trangle(vec3 v0, vec3 v1, vec3 v2,vec2 uv0,vec2 uv1,vec2 uv2, int nx, int ny)
{
float d = 1;//投影平面到原点距离
//透视投影
v0[0] = (v0[0] * d) / v0[2];
v0[1] = (v0[1] * d) / v0[2];
v1[0] = (v1[0] * d) / v1[2];
v1[1] = (v1[1] * d) / v1[2];
v2[0] = (v2[0] * d) / v2[2];
v2[1] = (v2[1] * d) / v2[2];
//屏幕映射
v0[0] = (1 + v0[0])*0.5*nx; v0[1] = (1 + v0[1])*0.5*ny;
v1[0] = (1 + v1[0])*0.5*nx; v1[1] = (1 + v1[1])*0.5*ny;
v2[0] = (1 + v2[0])*0.5*nx; v2[1] = (1 + v2[1])*0.5*ny;
//
v0[2] = 1 /v0[2]; v1[2] = 1 / v1[2]; v2[2] = 1 / v2[2];
return tra(v0, v1, v2, uv0, uv1, uv2);
}
3.透视投影
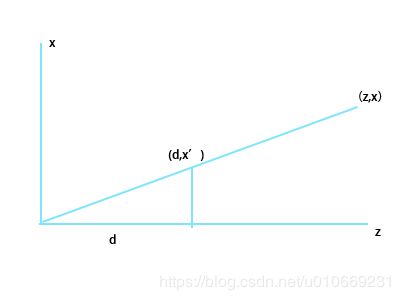
以x-z坐标为例,如图将点(x,0,z)投影到距观察点(原点)为d的屏幕上
x/x’=z/d 即x=z*(x’/d)。
4.屏幕映射
即x’=(nx+x*nx)/2,其中nx为屏幕宽度。
x=-1时映射到0。
x=0时映射到(nx)/2。
x=1是映射到nx。
5.深度插值&&顶点属性插值
公式推导在这里及其下一章,本文不再详细介绍,总之最后得到两个结论:
1.三角形面上z值的倒数是线性插值。

2.三角形面上的插值属性与z坐标值倒数的乘积(c/z)是线性插值。
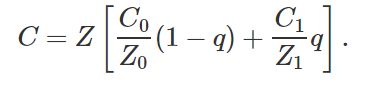
光栅化时,图形处理器首先计算1/z的线性插值,在计算其倒数,最后乘以b/z的线性插值结果,则可获得顶点属性b的透视校正插值结果。
对应代码:
Trangle函数:
v0[2] = 1 /v0[2]; v1[2] = 1 / v1[2]; v2[2] = 1 / v2[2];
Color函数:
float xxx = w0 * tr.uv0[0]* tr.v0.z + w1 * tr.uv1[0] * tr.v1.z + w2 * tr.uv2[0] * tr.v2.z;
float yyy = w0 * tr.uv0[1] * tr.v0.z + w1 * tr.uv1[1] * tr.v1.z + w2 * tr.uv2[1] * tr.v2.z;
z = 1 / (w0*tr.v0[2] + w1 * tr.v1[2] + w2 * tr.v2[2]);
xxx *= z; yyy *= z;
其中tr.uv[0]是uv值,通过插值得到p点的uv值(xxx,yyy)。
6.纹理采样
载入贴图,所需头文件在stbi_image.h里,长和宽的数据存储在w和h里。
unsigned char *data = stbi_load("container.jpg", &w, &h, &nchannel, 0);
纹理采样 这里的xxx,yyy是uv值
r = ((int)data[3 * int(xxx*w) + 3 * int(yyy*h)*w]) / 255.0;
g = ((int)data[3 * int(xxx*w) + 3 * int(yyy*h)*w+1])/255.0;
b = ((int)data[3 * int(xxx*w) + 3 * int(yyy*h)*w+2])/255.0;
获得P点像素颜色的代码
vec4 Color(vec3 &p, tra &tr, float area,unsigned char *data)
{
float r = 0, g = 0, b = 0, z = 0, zz = 0;
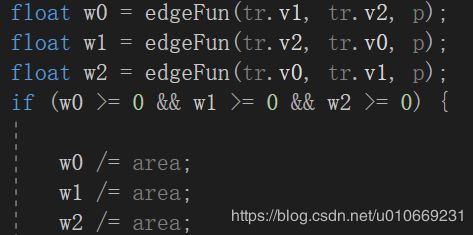
float w0 = edgeFun(tr.v1, tr.v2, p);
float w1 = edgeFun(tr.v2, tr.v0, p);
float w2 = edgeFun(tr.v0, tr.v1, p);
if (w0 >= 0 && w1 >= 0 && w2 >= 0) {
w0 /= area;
w1 /= area;
w2 /= area;
float xxx = w0 * tr.uv0[0]* tr.v0.z + w1 * tr.uv1[0] * tr.v1.z + w2 * tr.uv2[0] * tr.v2.z;
float yyy = w0 * tr.uv0[1] * tr.v0.z + w1 * tr.uv1[1] * tr.v1.z + w2 * tr.uv2[1] * tr.v2.z;
z = 1 / (w0*tr.v0[2] + w1 * tr.v1[2] + w2 * tr.v2[2]);
xxx *= z; yyy *= z;
r = ((int)data[3 * int(xxx*w) + 3 * int(yyy*h)*w]) / 255.0;
g = ((int)data[3 * int(xxx*w) + 3 * int(yyy*h)*w+1])/255.0;
b = ((int)data[3 * int(xxx*w) + 3 * int(yyy*h)*w+2])/255.0;
}
else
{
r = 0; g = 0; b = 0;
}
return vec4(r, g, b, z);
}
7.深度测试
首先生成一个深度缓冲
float zBuffer[nx][ny] ;
然后遍历所有三角形(这个例子只有三个),如果位于该三角形像素的z值小于zbuffer存储的Z值,则更新像素的rgb值及zbuffer的值。
if (pix1.w < zBuffer[i][j] && pix1.w)
{
rr = pix1.x;
gg = pix1.y;
bb = pix1.z;
zBuffer[i][j] = pix1.w;
}
if (pix2.w < zBuffer[i][j] && pix2.w)
{
rr = pix2.x;
gg = pix2.y;
bb = pix2.z;
zBuffer[i][j] = pix2.w;
}
if (pix3.w < zBuffer[i][j] && pix3.w)
{
rr = pix3.x;
gg = pix3.y;
bb = pix3.z;
zBuffer[i][j] = pix3.w;
}
8.基础光照
《3D数学》这本书中的思路是对顶点法向量N,指向光源的方向L和观察者方向V进行插值,计算每个像素的光照公式。
但是在LearnOpenGL中好像是先在顶点着色器中存储p点位于世界空间的FragPos,再在片段着色其中进行光照计算,本文是模拟第二种方式进行计算的,思路就是由某点像素坐标值p(x,y,0)逆推出p在世界空间中的坐标值在进行光照计算。
v0[0] = (1 + v0[0])*0.5*nx; v0[1] = (1 + v0[1])*0.5*ny;
v1[0] = (1 + v1[0])*0.5*nx; v1[1] = (1 + v1[1])*0.5*ny;
v2[0] = (1 + v2[0])*0.5*nx; v2[1] = (1 + v2[1])*0.5*ny;
v0[2] = 1 /v0[2]; v1[2] = 1 / v1[2]; v2[2] = 1 / v2[2];
通过上述代码我们可以逆推出P点在世界空间中的坐标:
zz = pix1.w;
xx = ((2 * p.x) / nx - 1)*zz;
yy = ((2 * p.y) / ny - 1)*zz;
之后进行光照计算,光照模型参考这里
if (zBuffer[i][j] == FLT_MAX)
{
zBuffer[i][j] = 1;
}
else
{
z = zBuffer[i][j];
vec3 fragpos = vec3(xx, yy, zz);
vec3 lightdir = lightpos - fragpos;
vec3 viewdir = viewpos - fragpos;
normal = normalize(normal);
lightdir = normalize(lightdir);
viewdir = normalize(viewdir);
float diff = max(dot(lightdir, normal), 0);
vec3 rec = reflect(lightdir, normal);
rec = normalize(rec);
float spec = pow(max(dot(rec, viewdir), 0), 16);
vec3 result = lightcolor * (0.1 + spec + diff);
vec3 col = result * vec3(rr, gg, bb);
rr = col.x;
gg = col.y;
bb = col.z;
}
令所得RGB值不大于1
rr = rr > 1 ? 1 : rr;
gg = gg > 1 ? 1 : gg;
bb = bb > 1 ? 1 : bb;
最后输出到ppm文件里
outfile << " " << int(rr*255.99) << " " << int(gg*255.99) << " " << int(bb*255.99);
感谢您的阅读,祝您生活愉快~~