高通第三方算法(单帧数据)添加流程---hal1/hal3
这篇文档写了很久了,当时脑袋打结用的英文,懒得改成中文了,将就看下,如有错误请指正,谢谢


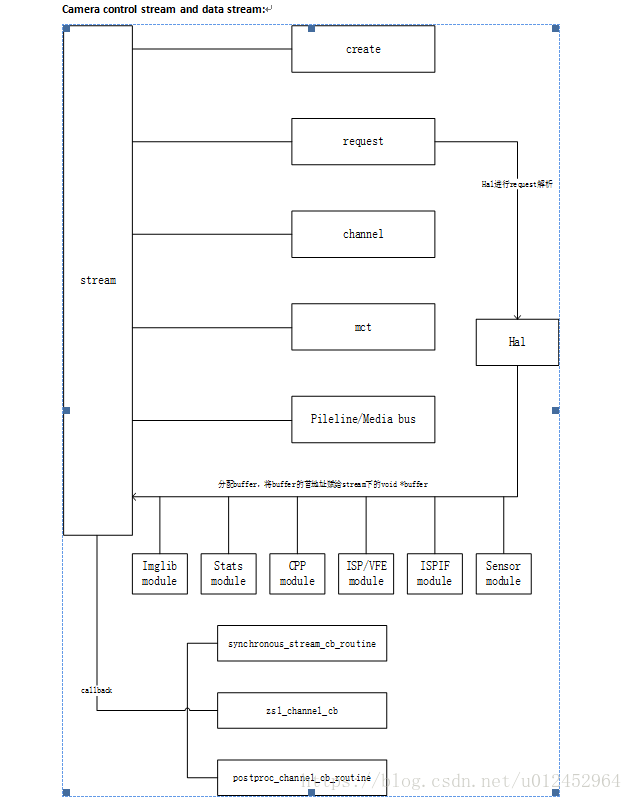
上图是我总结的高通camera架构。下面介绍怎么添加单帧的算法,其实就是对单帧数据进行处理。
Add 3rd algorithm of singleframe:
As we known,camera consists ofthree parts:preview,capture and video。
If we want to Add 3rdalgorithm,we must find out the data callbacked to the HAL that processed by ISP。
callback file:hardware\qcom\camera\QCamera2\HAL\QCamera2HWICallbacks.cpp
Preview/Video callback:
voidQCamera2HardwareInterface::synchronous_stream_cb_routine(
mm_camera_super_buf_t *super_frame,QCameraStream * stream,
void *userdata)
Capture callback:
voidQCamera2HardwareInterface::zsl_channel_cb(mm_camera_super_buf_t*recvd_frame,
void *userdata)
voidQCamera2HardwareInterface::postproc_channel_cb_routine(mm_camera_super_buf_t*recvd_frame, void *userdata)
The key is the structure mm_camera_super_buf_t,next show the struct of it。
typedef struct {
uint32_t camera_handle;
uint32_tch_id;
uint32_t num_bufs;
uint8_t bUnlockAEC;
uint8_t bReadyForPrepareSnapshot;
mm_camera_buf_def_t* bufs[MAX_STREAM_NUM_IN_BUNDLE];
} mm_camera_super_buf_t;
The buffer is inside in struct mm_camera_buf_def;
typedef struct mm_camera_buf_def {
uint32_t stream_id;
cam_stream_type_t stream_type;
cam_stream_buf_type buf_type;
uint32_t buf_idx;
uint8_t is_uv_subsampled;
struct timespec ts;
uint32_t frame_idx;
union {
mm_camera_plane_buf_def_t planes_buf;
mm_camera_user_buf_def_t user_buf;
};
int fd;
void *buffer;//this stored the data of frame,we shouldoperate it。
size_t frame_len;
void *mem_info;
uint32_t flags;
} mm_camera_buf_def_t;
(Samplecode)Add Face Detection Algorithm:
这里面的so文件就是我们的算法库,通过dlopen函数对其进行操作。
在最开始需要定义:typedef int (*CAC_FUNC)(unsigned char *data, int width, int height);这个与算法接口是对应的。
也需要加入头文件:#include “dlfcn.h"

Position:Because realize FaceDetection just need to operate the buffer (one frame)that stored the data inthe forms of YUV420,so we can add Face Detection Algorithm everywhere in the function synchronous_stream_cb_routine。
Add algorithm step by step:
1:Realize FaceDetection。
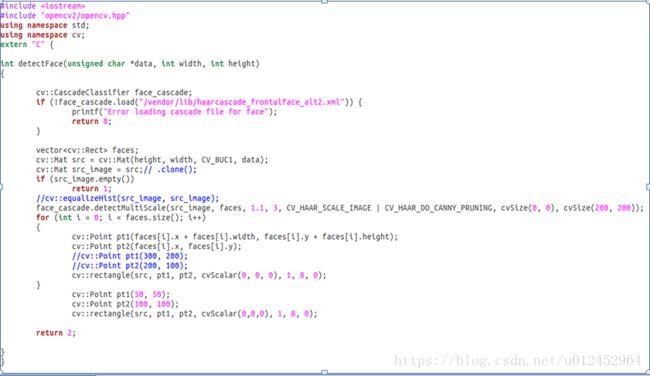
2:The Face Detection Algorithm depend on opencv lib。Compile it to be a so file (libmy.so) linked with libopencv_java3.so, then it will be private。
3:Push the related lib to the correct dir of your machine。haarcascade_frontalface_alt2.xml---->system/vendor/lib/haarcascade_frontalface_alt2.xml
libopencv_java3.so ---->/system/vendor/lib/libopencv_java3.so
libmy.so ---->/system/vendor/lib/libmy.so
以上是跑的hal1通道,如果跑的hal3通道的话,需要设置hal3 enable。(高通自带的相机就算打开hal3也是跑的hal1,应该是不支持hal3的,需另装apk)
设置命令是:adb shell setprop persist.camera.HAL3.enabled 1
Hal3的回调文件是:Qcamera3Channel.cpp
预览的回调是在:
voidQCamera3ProcessingChannel::streamCbRoutine(mm_camera_super_buf_t *super_frame,
QCamera3Stream *stream)
拍照的回调是在:
voidQCamera3PicChannel::streamCbRoutine(mm_camera_super_buf_t *super_frame,
QCamera3Stream*stream)

如上图所示就是在预览回调函数里面处理buffer,实现预览变灰的效果。