OpenCV对象检测实例
https://www.toutiao.com/a6644490462834983438/
2019-01-09 21:36:31
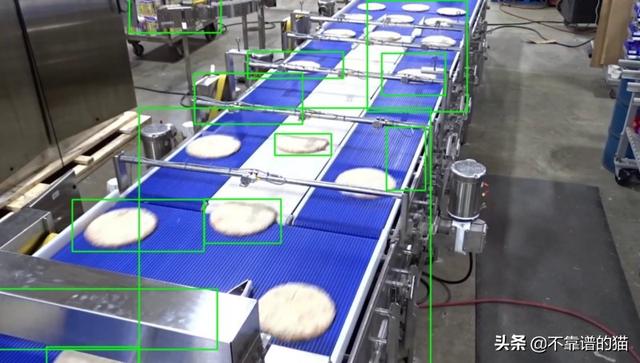
在本文中,我将演示如何跟踪传送带上的对象。这可以用于在传送带上定位对象,或者可以进一步用于执行质量控制和检查。我将在Windows上使用Python OpenCV库进行此演示。原始视频如下:

假设在视频的00:00:24和00:00:36之间,有我们要检测的对象。让我们从剪切我们最感兴趣视频部分开始。
#import tools
from moviepy.video.io.ffmpeg_tools import ffmpeg_extract_subclip
#t1 and t2 correspond to beginning and end time in seconds
#target name corresponds to the output file name
ffmpeg_extract_subclip("Conveyor for Packaged Food.mp4", t1 = 24, t2=36, targetname="test.mp4")
一旦我们剪切后,我们现在可以开始编辑和操作我们的小视频,以生成精确的检测和跟踪运动中的对象。首先导入Python库
# Libraries needed
import numpy as np
import cv2
import time
我们可以导入剪切视频并运行它。
import numpy as np
import cv2
import time
cap = cv2.VideoCapture("test.mp4")
fgbg = cv2.createBackgroundSubtractorMOG2()
while(1):
time.sleep(1/25) #This slows down the video
ret, frame = cap.read()
cv2.imshow("frame",frame)
k = cv2.waitKey(1) & 0xff
if k == 27:
break
cap.release()
cv2.destroyAllWindows()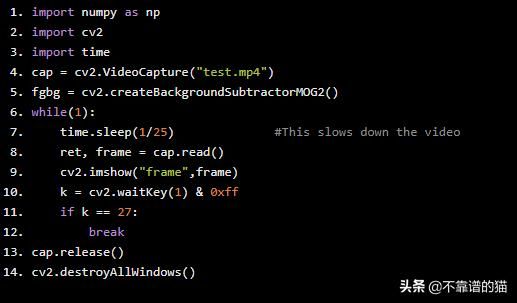
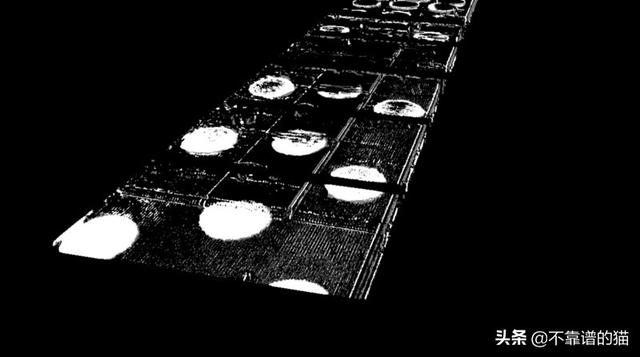
首先,我们可以提取移动对象的前景和背景(fgbg)。在下面的Python代码中,fgbg应用于main frame。它检测任何变化的像素并将它们的颜色设置为白色,同时保持所有静态像素为黑色。然后我们可以根据它们的强度和大小提取运动物体的轮廓。然后,提取位置(x,y)以及高度(h)和宽度(w)以围绕这些轮廓绘制矩形。请注意,这些框的位置和尺寸是从fgmask中提取的,并且实际上是在main frame上绘制的。
fgmask = fgbg.apply(frame)
(im2, contours, hierarchy) = cv2.findContours(fgmask.copy(),
cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
if cv2.contourArea(c) <= 1500 :
continue
x,y,w,h = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255,0), 2)
cv2.imshow("fgmask",fgmask)
如果我们包含上面的代码,我们会看到类似下面的图片:
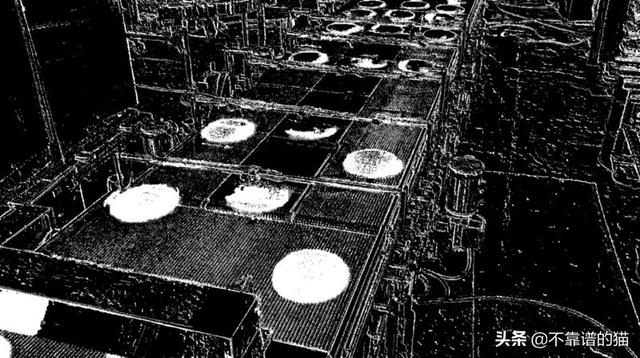
fgmask
然而,移动的像素不仅仅是输送带上的物体,输送带本身也有微小的运动,在背景中有框架上的反射,横条和设备。这将导致检测所有这些运动作为单独的对象。
初始噪声检测
要解决这个问题,我们可以做的第一件事是指定一个感兴趣的区域(ROI),并引入一些去噪函数。这是通过包含以下Python代码行来实现的。
pts = np.array([[700,5],[950,5],[730,600],[100,500]], np.int32)
pts = pts.reshape((-1,1,2))
new = cv2.polylines(frame,pts[:3],True,(0,0,0))
mask = np.zeros((new.shape[0], new.shape[1]))
cv2.fillConvexPoly(mask, pts, 1)
mask = mask.astype(np.bool)
roi = np.zeros_like(new)
roi[mask] = new[mask]
blurred_frame = cv2.GaussianBlur(roi, (5,5), 0)
fgmask = fgbg.apply(blurred_frame)
更改fgbg mask的参数以从提取的ROI中获取其图像也很重要。当物体在它们下方通过时,我们仍然存在横杆反射的问题。以下Python代码在这些区域上绘制线条以避免混淆。
cv2.line(roi,(670,35),(920,55),(0,0,0),10)
cv2.line(roi,(630,75),(920,100),(0,0,0),10)
cv2.line(roi,(540,130),(900,160),(0,0,0),13)
cv2.line(roi,(465,210),(850,250),(0,0,0),13)
cv2.line(roi,(320,320),(800,385),(0,0,0),18)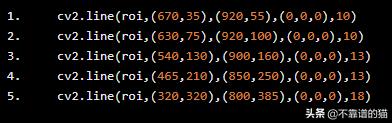
最后,这将为我们提供干净的物体检测,噪音可以忽略不计。
应用ROI和去噪后的fgbg
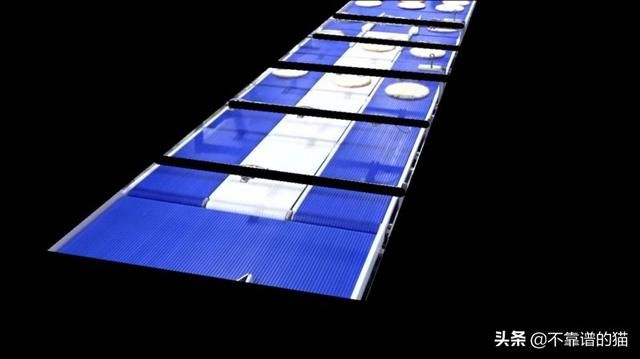
ROI and cross bars blackout
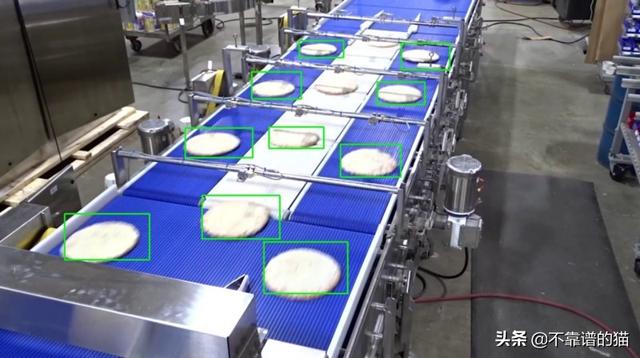
最终检测
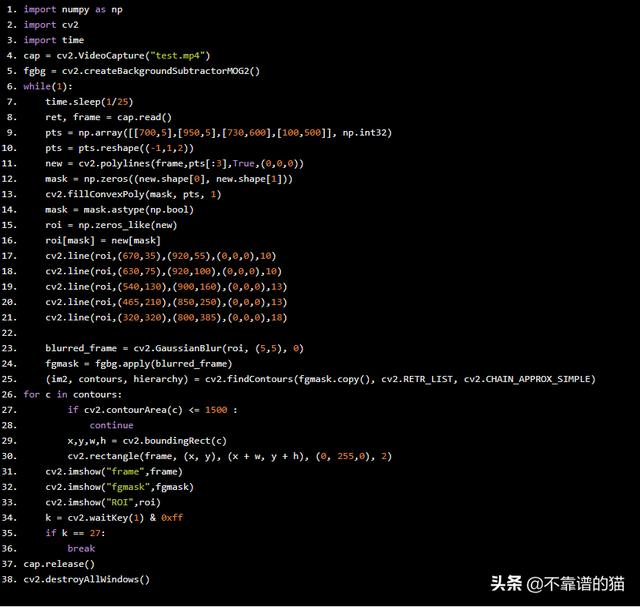
总结一下,这是最终的Python代码:
import numpy as np
import cv2
import time
cap = cv2.VideoCapture("test.mp4")
fgbg = cv2.createBackgroundSubtractorMOG2()
while(1):
time.sleep(1/25)
ret, frame = cap.read()
pts = np.array([[700,5],[950,5],[730,600],[100,500]], np.int32)
pts = pts.reshape((-1,1,2))
new = cv2.polylines(frame,pts[:3],True,(0,0,0))
mask = np.zeros((new.shape[0], new.shape[1]))
cv2.fillConvexPoly(mask, pts, 1)
mask = mask.astype(np.bool)
roi = np.zeros_like(new)
roi[mask] = new[mask]
cv2.line(roi,(670,35),(920,55),(0,0,0),10)
cv2.line(roi,(630,75),(920,100),(0,0,0),10)
cv2.line(roi,(540,130),(900,160),(0,0,0),13)
cv2.line(roi,(465,210),(850,250),(0,0,0),13)
cv2.line(roi,(320,320),(800,385),(0,0,0),18)
blurred_frame = cv2.GaussianBlur(roi, (5,5), 0)
fgmask = fgbg.apply(blurred_frame)
(im2, contours, hierarchy) = cv2.findContours(fgmask.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
if cv2.contourArea(c) <= 1500 :
continue
x,y,w,h = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255,0), 2)
cv2.imshow("frame",frame)
cv2.imshow("fgmask",fgmask)
cv2.imshow("ROI",roi)
k = cv2.waitKey(1) & 0xff
if k == 27:
break
cap.release()
cv2.destroyAllWindows()