机器学习十大经典算法之决策树(学习笔记整理)
一、决策树概述
决策树是一种树形结构,其中每个内部节点表示一个属性上的测试,每个分支代表一个测试输出,每个叶节点代表一种类别。决策树是一个预测模型,代表的是对象属性与对象值之间的一种映射关系。

最初的节点称为根节点(如图中的"颜色"),有分支的节点称为中间节点(如图中的"价格"),无分支的节点称为叶节点(如图中的"喜欢")
优点:计算复杂度不高,输出结果容易理解,对中间值的缺失不敏感,可以处理不相关特征数据
缺点:可能产生过拟合问题
适用数据类型:数值型和标称型
二、节点变量的选择
应该选择哪些变量作为根节点或中间节点生成决策树,目前主流的有三种方法。
1.ID3算法
(1) 信息的定义:
事件的不确定性越大,则其信息越多 l ( x i ) = − log 2 P ( x i ) l(x_i)=-\log_2P(x_i) l(xi)=−log2P(xi)其中xi是某一事件的第i个可能值,P(xi)为其概率。
(2) 信息熵的定义:
信息熵为信息的数学期望 H = − ∑ k = 1 K p k log 2 p k H=-\sum_{k=1}^{K}{p_k\log_2p_k} H=−k=1∑Kpklog2pk某一事件有K个值,pk表示第k个值发生的概率。
实际应用中可以用频率替换实际概率pk H ( D ) = − ∑ k = 1 K ∣ C k ∣ ∣ D ∣ log 2 ∣ C k ∣ ∣ D ∣ H(D)=-\sum_{k=1}^{K}{\frac {|C_k|} {|D|}\log_2\frac {|C_k|} {|D|}} H(D)=−k=1∑K∣D∣∣Ck∣log2∣D∣∣Ck∣其中|D|表示事件中的所有样本点,|Ck|表示事件的第k个可能值出现的次数。
(3) 条件熵:
H ( D ∣ A ) = ∑ i , k p ( A i ) H ( D k ∣ A i ) = − ∑ i = 1 n P ( A i ) ∑ k = 1 K P ( D k ∣ A i ) log 2 P ( D k ∣ A i ) H(D|A)=\sum_{i,k}{p(A_i)H(D_k|A_i)}=-\sum_{i=1}^{n}{P(A_i)\sum_{k=1}^{K}{P(D_k|A_i)\log_2P(D_k|A_i)}} H(D∣A)=i,k∑p(Ai)H(Dk∣Ai)=−i=1∑nP(Ai)k=1∑KP(Dk∣Ai)log2P(Dk∣Ai)其中P(Ai)为事件A第i种值对应的概率,P(Dk|Ai)为已知Ai的情况下D事件为第k种值的概率,即条件概率。
以频率代替概率:
H ( D ∣ A ) = − ∑ i = 1 n ∣ D i ∣ ∣ D ∣ ∑ k = 1 K ∣ D i k ∣ ∣ D i ∣ log 2 ∣ D i k ∣ ∣ D i ∣ H(D|A)=-\sum_{i=1}^{n}{\frac {|D_i|} {|D|}\sum_{k=1}^{K}{\frac {|D_{ik}|} {|D_i|}\log_2\frac {|D_{ik}|} {|D_i|}}} H(D∣A)=−i=1∑n∣D∣∣Di∣k=1∑K∣Di∣∣Dik∣log2∣Di∣∣Dik∣其中|Di|为Ai的频数,|Dik|为Ai下D事件为第k种值的频数。
(4) 信息增益:
G a i n A ( D ) = H ( D ) − H ( D ∣ A ) Gain_A(D)=H(D)-H(D|A) GainA(D)=H(D)−H(D∣A)事件A对事件D的影响越大,则其条件熵H(D|A)就会越小,信息增益就越大。根节点或中间节点变量的选择,就是选择使因变量的信息增益最大的自变量。
2.C4.5算法
ID3算法信息增益会偏向于取值较多的变量,极端例子如果一个变量的取值正好是N个,则其条件熵会等于0,在该变量下因变量的信息增益一定是最大的,为了克服这种缺点,C4.5算法使用信息增益率对根节点或中间节点进行选择。
G a i n R a t i o A ( D ) = G a i n A ( D ) H A GainRatio_A(D)=\frac {Gain_A(D)} {H_A} GainRatioA(D)=HAGainA(D)其中HA为事件A的信息熵。时间A的取值越多,信息增益GainA(D)可能越大,但同时HA也会越大,这样就以商的形式实现了对信息增益的惩罚。
3.CART算法
ID3和C4.5只能对离散型因变量进行分类,而CART可以处理连续型因变量。CART算法以基尼指数对根节点或中间节点进行选择。Python的sklearn模块使用的便是CART算法。
G i n i = ∑ k = 1 K p k ( 1 − p k ) = 1 − ∑ k = 1 K p k 2 Gini=\sum_{k=1}^{K}{p_k(1-p_k)}=1-\sum_{k=1}^{K}{p_k^2} Gini=k=1∑Kpk(1−pk)=1−k=1∑Kpk2其中pk为事件第k个可能值发生的概率。
以频率代替实际概率: G i n i ( D ) = 1 − ∑ k = 1 K ( ∣ C k ∣ ∣ D ∣ ) 2 Gini(D)=1-\sum_{k=1}^{K}{(\frac {|C_k|} {|D|})^2} Gini(D)=1−k=1∑K(∣D∣∣Ck∣)2
条件基尼指数 G i n i A ( D ) = ∑ i , k P ( A i ) G i n i ( D k ∣ A i ) = ∑ i = 1 2 P ( A i ) ( 1 − ∑ k = 1 K p i k 2 ) Gini_A(D)=\sum_{i,k}{P(A_i)Gini(D_k|A_i)}=\sum_{i=1}^{2}{P(A_i)(1-\sum_{k=1}^{K}{p_{ik}^2})} GiniA(D)=i,k∑P(Ai)Gini(Dk∣Ai)=i=1∑2P(Ai)(1−k=1∑Kpik2)
G i n i A ( D ) = ∑ i = 1 2 ∣ D i ∣ ∣ D ∣ ( 1 − ∑ k = 1 K ( ∣ D i k ∣ ∣ D i ∣ ) 2 ) Gini_A(D)=\sum_{i=1}^{2}{\frac {|D_i|} {|D|}(1-\sum_{k=1}^{K}{(\frac {|D_{ik}|} {|D_i|})^2})} GiniA(D)=i=1∑2∣D∣∣Di∣(1−k=1∑K(∣Di∣∣Dik∣)2)
Δ G i n i ( D ) = G i n i ( D ) − G i n i A ( D ) \Delta Gini(D)=Gini(D)-Gini_A(D) ΔGini(D)=Gini(D)−GiniA(D)
三、决策树的剪枝
无论是用ID3、C4.5还是CART生成的决策树,都可能存在过拟合的问题,因此经常需要对决策树进行剪枝。
预剪枝
预剪枝是在树的生长过程中就对其进行必要的剪枝,如限制树的最大深度、限制中间节点和叶节点所包含的最小样本量、限制生成的最多叶节点数量等。
后剪枝
后剪枝是在树充分生长后再对其返工剪枝。
1.误差降低剪枝法(Reduced-Error Pruning, REP)
将某一非叶节点的子孙节点删除,使其变为新的叶节点。新叶节点的类别确定是利用该节点剪枝前包含的所有叶节点投票,频数最高的类别作为新的类别。利用测试集的数据对比剪枝前后的误判样本量,如果新树的误判样本量少于老树,则可以剪枝,否则不可剪枝。重复此步骤直到达到最大的预测准确率。由于使用测试集,该方法可能导致剪枝过度。
2.悲观剪枝法(Pessimistic Error Pruning, PEP)
自上向下的剪枝会增加误判率,因此对叶节点的误判个数增加一个经验性的惩罚系数0.5。
剪枝后的误判率: e ′ ( T ) = ( E ( T ) + 0.5 ) / N e'(T)=(E(T)+0.5)/N e′(T)=(E(T)+0.5)/N剪枝前的误判率: e ′ ( T t ) = ( ∑ i = 1 L E ( t i ) + 0.5 ) / ( ∑ i = 1 L N i ) e'(T_t)=(\sum_{i=1}^{L}{E(t_i)+0.5})/(\sum_{i=1}^{L}{N_i}) e′(Tt)=(i=1∑LE(ti)+0.5)/(i=1∑LNi)其中E(T)为中间节点T处的误判个数,N为中间节点T的样本个数,L为中间节点T下所有的叶节点个数,E(ti)为中间节点T下所有叶节点的误判个数,Ni为各叶节点中的样本个数。
剪枝判断标准:
E ( e ′ ( T ) ) < E ( e ′ ( T t ) ) + S t d ( e ′ ( T t ) ) E(e'(T))<E(e'(T_t))+Std(e'(T_t)) E(e′(T))<E(e′(Tt))+Std(e′(Tt))其中E()是数学期望,Std()是标准差。
3.代价复杂度剪枝法(Cost-Complexity Pruning, CCP)
剪枝的代价是误判率会上升,但同时树的复杂度会减少,代价复杂度剪枝法引入了一个系数 α \alpha α来平衡代价和复杂度。
代价复杂度剪枝法的目标函数: C α ( T ) = C ( T ) + α ⋅ ∣ N l e a f ∣ = ∑ i = 1 L N i ∗ H ( i ) + α ⋅ ∣ N l e a f ∣ C_\alpha(T)=C(T)+\alpha\cdot|N_{leaf}|=\sum_{i=1}^{L}{N_i*H(i)}+\alpha\cdot|N_{leaf}| Cα(T)=C(T)+α⋅∣Nleaf∣=i=1∑LNi∗H(i)+α⋅∣Nleaf∣节点T下有L个叶节点,其中Ni为第i个叶节点的样本量,H(i)为第i个叶节点的信息熵,|Nleaf|=L。
剪枝前的目标函数: C α ( T ) b e f o r e = C ( T ) b e f o r e + α ⋅ ∣ N l e a f ∣ C_\alpha(T)_{before}=C(T)_{before}+\alpha\cdot|N_{leaf}| Cα(T)before=C(T)before+α⋅∣Nleaf∣
剪枝后的目标函数: C α ( T ) a f t e r = C ( T ) a f t e r + α ⋅ 1 C_\alpha(T)_{after}=C(T)_{after}+\alpha\cdot1 Cα(T)after=C(T)after+α⋅1
令 C α ( T ) b e f o r e = C α ( T ) a f t e r C_\alpha(T)_{before}=C_\alpha(T)_{after} Cα(T)before=Cα(T)after,得到: α = C ( T ) a f t e r − C ( T ) b e f o r e ∣ N l e a f ∣ − 1 \alpha=\frac {C_(T)_{after}-C_(T)_{before}} {|N_{leaf}|-1} α=∣Nleaf∣−1C(T)after−C(T)before
循环计算 α \alpha α值并减去 α \alpha α值最小的节点,最终实现剪枝。
Python的sklearn中只提供了预剪枝的方法。
四、随机森林
如果预剪枝不够理想,还可以使用集成的随机森林算法,可以很好的避免单棵决策树过拟合的问题。
如果训练集有N个样本,P个自变量,1个因变量:
- 利用Bootstrap抽样法,从原始数据中生成k个数据集(样本个数N,变量个数P)
- 针对这k个数据集中的每一个数据集,构造一棵决策树(变量个数p,从总变量个数P中随机选择),并且每一棵决策树都不剪枝。
- 针对这k棵决策树形成的随机森林,对分类问题利用投票法,得票最高的类别作为最终的判断结果;对回归问题利用均值法,所有结果的平均值作为最终的预测结果。
在形成随机森林的过程中,由于每棵树的训练样本是随机的,构成树节点的变量也是随机选择的,所以使得随机森林不容易产生过拟合。
五、代码实现
首先仍然是所用到函数的官方文档解释
1.
(1)sklearn.tree.DecisionTreeClassifier(criterion=’gini’, splitter=’best’, max_depth=None, min_samples_split=2, min_samples_leaf=1, min_weight_fraction_leaf=0.0, max_features=None, random_state=None, max_leaf_nodes=None, min_impurity_decrease=0.0, min_impurity_split=None, class_weight=None, presort=False)
(2)sklearn.tree.DecisionTreeRegressor(criterion=’mse’, splitter=’best’, max_depth=None, min_samples_split=2, min_samples_leaf=1, min_weight_fraction_leaf=0.0, max_features=None, random_state=None, max_leaf_nodes=None, min_impurity_decrease=0.0, min_impurity_split=None, presort=False)

sklearn.ensemble.RandomForestClassifier(n_estimators=’warn’, criterion=’gini’, max_depth=None, min_samples_split=2, min_samples_leaf=1, min_weight_fraction_leaf=0.0, max_features=’auto’, max_leaf_nodes=None, min_impurity_decrease=0.0, min_impurity_split=None, bootstrap=True, oob_score=False, n_jobs=None, random_state=None, verbose=0, warm_start=False, class_weight=None)



sklearn.ensemble.RandomForestRegressor(n_estimators=’warn’, criterion=’mse’, max_depth=None, min_samples_split=2, min_samples_leaf=1, min_weight_fraction_leaf=0.0, max_features=’auto’, max_leaf_nodes=None, min_impurity_decrease=0.0, min_impurity_split=None, bootstrap=True, oob_score=False, n_jobs=None, random_state=None, verbose=0, warm_start=False)


接下来是代码
1.分类
import pandas as pd
import numpy as np
from sklearn import model_selection,tree,metrics,ensemble
from sklearn.model_selection import GridSearchCV
import matplotlib.pyplot as plt
data=pd.read_csv(r'C:\Users\Administrator\Desktop\data.csv')
#拆分训练集和测试集
predictors=data.columns[1:]
x_train,x_test,y_train,y_test=model_selection.train_test_split(data[predictors],data.Survived,
test_size=0.25,random_state=1234)
#使用网格搜索法,尝试不同组合(最大深度、分支最小样本量、叶节点最小样本量)
#根据经验,数据量较小时树的最大深度可设置10以内,较大时则需设置比较大的树深度,如20左右
max_depth=[2,3,4,5,6]
min_samples_split=[2,4,6,8]
min_samples_leaf=[2,4,8,10,12]
parameters={'max_depth':max_depth,'min_samples_split':min_samples_split,'min_samples_leaf':min_samples_leaf}
#网格搜索法,测试不同的参数值
grid_dtcateg=GridSearchCV(estimator=tree.DecisionTreeClassifier(),param_grid=parameters,cv=10)
#模型拟合
grid_dtcateg.fit(x_train,y_train)
#返回最佳参数组合
print(grid_dtcateg.best_params_)
#构建分类决策树
CART_Class=tree.DecisionTreeClassifier(max_depth=grid_dtcateg.best_params_['max_depth'],
min_samples_leaf=grid_dtcateg.best_params_['min_samples_leaf'],
min_samples_split=grid_dtcateg.best_params_['min_samples_split'])
decision_tree=CART_Class.fit(x_train,y_train)
pred=CART_Class.predict(x_test)
print('测试集的预测准确率:',metrics.accuracy_score(y_test,pred))
print('训练集的预测准确率:',metrics.accuracy_score(y_train,CART_Class.predict(x_train)))
#绘制ROC曲线
y_score=CART_Class.predict_proba(x_test)[:,1] #预测值为第2种的概率
fpr,tpr,threshold=metrics.roc_curve(y_test,y_score)
#计算AUC的值
roc_auc=metrics.auc(fpr,tpr)
#绘制面积图
plt.stackplot(fpr,tpr,color='steelblue',alpha=0.5,edgecolor='black')
#添加边际线和对角线
plt.plot(fpr,tpr,color='black',lw=1)
plt.plot([0,1],[0,1],color='red',linestyle='--')
#添加文本信息
plt.text(0.4,0.4,'DecisionTree ROC curve (area = %0.2f)' % roc_auc)
#添加x轴和y轴标签
plt.xlabel('l-Specificity')
plt.ylabel('Sensitivity')
plt.show()
#构建随机森林
RF_class=ensemble.RandomForestClassifier(n_estimators=200,random_state=1234)
RF_class.fit(x_train,y_train)
RFclass_pred=RF_class.predict(x_test)
print('随机森林模型在测试集的预测准确率:',metrics.accuracy_score(y_test,RFclass_pred))
#绘制ROC曲线
y_score=RF_class.predict_proba(x_test)[:,1]
fpr,tpr,threshold=metrics.roc_curve(y_test,y_score)
#计算AUC的值
roc_auc=metrics.auc(fpr,tpr)
#绘制面积图
plt.stackplot(fpr,tpr,color='steelblue',alpha=0.5,edgecolor='black')
#添加边际线和对角线
plt.plot(fpr,tpr,color='black',lw=1)
plt.plot([0,1],[0,1],color='red',linestyle='--')
#添加文本信息
plt.text(0.4,0.3,'RandomForest ROC curve (area = %0.2f)' % roc_auc)
#添加x轴和y轴标签
plt.xlabel('l-Specificity')
plt.ylabel('Sensitivity')
plt.show()
#变量重要程度绘图
importance=RF_class.feature_importances_
Impt_Series=pd.Series(importance,index=x_train.columns)
Impt_Series.sort_values(ascending=True).plot('barh')
plt.show()
结果:

可以看到使用随机森林确实提高了准确率
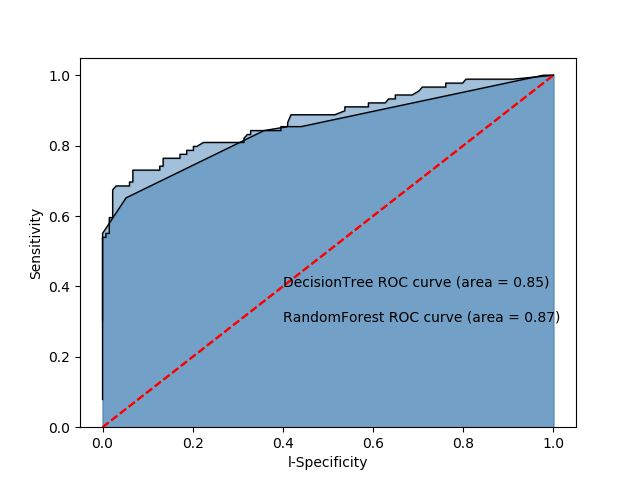
ROC曲线下的面积AUC均超过0.8,可以认为模型拟合效果比较理想,并且随机森林的ROC曲线AUC更大。
变量重要性程度如下:

2.预测
import pandas as pd
from sklearn import model_selection,tree,metrics,ensemble
from sklearn.model_selection import GridSearchCV
data=pd.read_excel(r'C:\Users\sc\Desktop\NHANES.xlsx')
#拆分训练集和测试集
predictors=data.columns[:-1]
x_train,x_test,y_train,y_test=model_selection.train_test_split(data[predictors],data.CKD_epi_eGFR,
test_size=0.25,random_state=1234)
#预设各参数
max_depth=[18,19,20,21,22]
min_samples_split=[2,4,6,8]
min_samples_leaf=[2,4,8,10,12]
parameters={'max_depth':max_depth,'min_samples_split':min_samples_split,'min_samples_leaf':min_samples_leaf}
#网格搜索法,测试不同的参数值
grid_dtcateg=GridSearchCV(estimator=tree.DecisionTreeRegressor(),param_grid=parameters,cv=10)
grid_dtcateg.fit(x_train,y_train)
#返回最佳参数组合
print(grid_dtcateg.best_params_)
#构建回归的决策树
CART_Reg=tree.DecisionTreeRegressor(max_depth=grid_dtcateg.best_params_['max_depth'],
min_samples_leaf=grid_dtcateg.best_params_['min_samples_leaf'],
min_samples_split=grid_dtcateg.best_params_['min_samples_split'])
CART_Reg.fit(x_train,y_train)
pred=CART_Reg.predict(x_test)
print('决策树均方误差MSE:',metrics.mean_squared_error(y_test,pred))
#构建用于回归的随机森林
RF=ensemble.RandomForestRegressor(n_estimators=200,random_state=1234)
RF.fit(x_train,y_train)
RF_pred=RF.predict(x_test)
print('随机森林均方误差:',metrics.mean_squared_error(y_test,RF_pred))
结果:

可以看到随机森林模型的均方误差要小很多。
参考文献:
[1]scikit-learn官方文档:http://scikit-learn.org/stable/index.html
[2]Peter Harrington.《机器学习实战》.人民邮电出版社,2013-6
[3]刘顺祥.《从零开始学Python数据分析与挖掘》.清华大学出版社,2018