基于Arduino的自动调速风扇
好久没有更新了,家里实在太乱,最近趁着618活动,买了一堆收纳抽屉和置物架,把家里彻底收拾了一下,然后客厅就成了这个奇葩样子,注孤生的节奏了。

话不多说,夏天到了,天气逐渐热起来,风扇成了必不可少的消暑利器。
本文主要介绍两种基于Arduino的风扇自动调速方案,使用的是5V的USB风扇,物美价廉还省电。
方案一是通过舵机控制旋钮变压器实现调速,方案二通过脉冲宽度调制(PWM)实现调速。
方案一:旋钮变压器
材料清单
| 名称 | 数量 | 淘宝单价 |
|---|---|---|
| Arduino UNO | 1 | 15 |
| USB风扇调速器 | 1 | 6 |
| DH11温湿度传感器 | 1 | 4 |
| SG90S舵机 | 1 | 7.5 |
| 红外接收模块加遥控器 | 1 | 3.3 |
所用零件均可在淘宝买到,价格时有波动。

思路是通过DH11温湿度传感器测量温度,根据温度控制舵机的角度,舵机的转轴与USB风扇调速器的旋钮连接,带动旋钮转动,进而控制风扇的输入电压,实现转速控制。
此外,增加了红外控制,用于远程开关风扇,切换模式。
接线

代码
需要红外控制模块和DH11温湿度传感器的库,代码及库的下载链接在文末。
3种红外信号分别对应全开、全关和自动模式。
自动模式会根据室温调节风扇的转速。
#include 方案二:脉冲宽度调制(PWM)
脉冲宽度调制(pulse width modulation)通过快速打开和关闭电源来调整发送到电子设备的平均电压值。
平均电压取决于占空比,占空比是指在一个脉冲循环内,通电时间相对于总时间所占的比例。
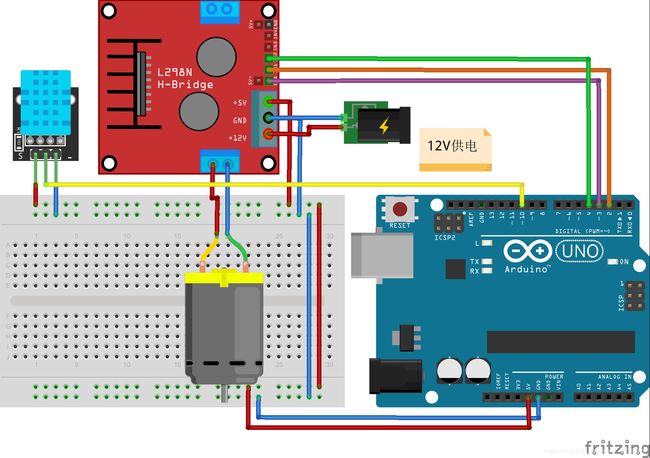
可以通过Arduino的脉宽调制输出连接L298N电机驱动模块,并通过控制脉宽调制输出来控制电机的速度。
通过下图可以看出,输入电压为12V,当占空比为0.25时,平均电压值为3V;当占空比为0.5时,平均电压值为6V。

材料清单
| 名称 | 数量 | 淘宝单价 |
|---|---|---|
| Arduino UNO | 1 | 15 |
| L298N电机控制模块 | 1 | 6 |
| DH11温湿度传感器 | 1 | 4 |
所用零件均可在淘宝买到,价格时有波动。
仍然是通过DH11温湿度传感器测量温度,然后根据温度计算占空比,改变L298N电机控制模块的平均输出电压,实现转速控制。
接线
代码
需要L298N电机控制模块和DH11温湿度传感器的库,代码及库的下载链接在文末。
通过map函数将室温转换为占空比。
motorSpeed = map(t, tempMin, tempMax, speedMin, speedMax);
以本文为例
motorSpeed = map(t, 28, 50, 30, 100);
上文已经交代,占空比是指在一个脉冲循环内,通电时间相对于总时间所占的比例。
即温度从28变化到50,占空比从0.3变化到1。
#include 代码及库下载的链接
- 方案一代码
提取码:vgwz - 方案二代码
提取码:akgf - 红外控制模块库
提取码:ldhx - DH11温湿度传感器库
提取码:9x70 - L298N电机控制模块库
提取码:8vek
本人菜鸟,发现错误,欢迎指出,谢谢大家。