【计算机图形学】图元的区域填充之多边形的区域填充
相关资料来源于网络,侵删歉。
如果文章中存在错误,请下方评论告知我,谢谢!
多边形的区域填充
首先,我们了解一下多边形。
多边形可以简单地分为凸多边形和凹多边形,除此之外,我们还要讨论内含环的多边形,如下图。
多边形的表示方法
顶点表示:用多边形顶点的序列来刻画多边形。直观、几何意义强、占内存少;不能直接用于显示。
点阵表示:用位于多边形内的像素的集合来刻画多边形。失去了许多重要的几何信息;但它是光栅显示系统显示时所需的表示形式,易于面着色。
多边形的扫描转换(多边形的区域填充)
把多边形的顶点表示转换为点阵表示,也就是从多边形的给定边界出发,求出位于其内部的各个像素,并给各个像素设置相应的灰度和颜色,通常称这种转换为多边形的扫描转换。
方法:逐点判断法,扫描线算法,边缘填充法等。
前提
多边形的顶点坐标均为整数。
逐点判断法
逐个判断绘图窗口内的像素,确定是否在多边形区域内,从而求出位于多边形区域内的像素集合。
#define MAXN 100
typedef struct{
int PolygonNum;//多边形顶点个数
Point vertexces[MAXN];//多边形顶点数组
}Polygon;
void FillPolygonPbyP(Polygon *P, int color){
int x, y;
for(y=ymin;y<=ymax;y++)
for(x=xmin;x<=xmax;x++)
if(isInside(P,x,y))
WritePixel(x,y,color);
}如何判断点在多边形内外呢?
1.射线法
从点v发出射线,求与多边形的交点个数n。若n为奇数,则点v在多边形内部;若n为偶数,则点v在多边形外部。
2.累计角度法
从点v向多边形的每个顶点发出射线,形成有向角,计算所有有向角的角度和S。若S=0,则点v在多边形外部;若S=±2π,则点v在多边形内部。
逐点判断的算法虽然程序简单,但不可取。原因是速度太慢,主要是由于该算法割断了各象素之间的联系,孤立地考察各象素与多边形的内外关系,使得几十万甚至几百万个象素都要一一判别,每次判别又要多次求交点,需要做大量的乘除运算,花费很多时间。
扫描线算法
前提:处理对象为非自交多边形,即边与边之间除了顶点外无其它交点,如下图是自交多边形。
将多边形填充分解为一条条的扫描线填充(扫描线是纵坐标为整数的横线)。对任一条扫描线,自左向右确定该扫描线与多边形的交点位置,并对每对交点间的像素进行填充。那么关键是如何求扫描线与多边形各边的交点,并进行取舍,如下图。
我们作如下规定:
1.如果交点非整数
交点位于左边之上,向右取整;交点位于右边之上,向左取整。(要使交点位于多边形内)
2.落在右上边界的像素不记录。
3.如果交点是与扫描线相交的那条边的上端点,单独对这条边不记录。(结合上图中2、4、5、6-7间的点加以理解)
步骤
求交:求扫描线与多边形各边交点
排序:按x递增顺序对交点排序
交点匹配:依次每两个交点配对,在上图中(1,2),(3,4),(5,6),(7,8)配对。
填充:填充每对交点间在多边形区域内部的象素。
几点说明
1.交点个数为偶数。
2.若交点个数为n,则配对的点为(k,k+1),k=1,3,5...,n-1。
3.配对的区间是位于多边形内的,其余不是。
接下来我们具体了解一下如何求扫描线与多边形的交点。
假定已经求解出扫描线y=e和多边形边的所有交点,那么递推出扫描线y=d=e+1与多边形边的交点,求解可分为两类:
1.边既和y=e相交,又和y=d相交。
若x为其中某条边与y=e的交点横坐标,k为该边的斜率,则此边与y=d的交点横坐标x'=x+1/k;
2.边只与y=d相交,不与y=e相交,即新出现的边。
此时,这些边的下端点就是交点,不用计算。
几种特殊情况
1.不对水平边计算,在预处理阶段将水平边删除。
2.对尖角的处理(即填充区域非常狭窄),扫描线原则上一个元素都不会填充,这时我们需要进行反走样。
好了,我们来看实现。
扫描线算法中采用了灵活的数据结构。
1.边结构
typedef struct
{
int ymax; // 边的上端点的y值
float x; // ET表中为边的下端点的x值;AET中为当前扫描线与边的交点的x值
float dx; // 单位高度x方向偏移量(即边的斜率的倒数)
E * nextEdge ; // 指向下一条边的指针
}E;
2.边表ET
边表ET的基本元素是边结构,它是按多边形每条边的下端点的y坐标对非水平边进行分类的。边的下端点y坐标值等于i,那么该边就属于第i类。同一类中的边按其下端点的x值(x值相等的,按dx值)增序排列。如下图。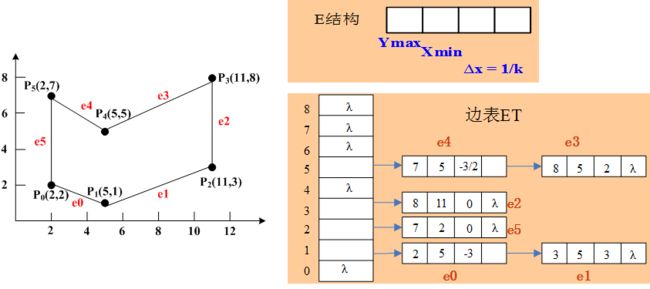
3.活动边表AET
活动边表AET的基本元素也是边结构,它由当前与扫描线相交的边组成,记录多边形的边和当前扫描线的所有交点的x坐标,并且随着扫描线的递增而不断变化。
(边表ET用来排除不必要的求交测试。如求扫描线y=4的AET时,e3,e4所属的类序号5大于4,所以它们和y=4没有交点,不用进行求交测试。)
伪代码:
void polyfill (polygon, color)
{
//建立全局边表ET;
for (各条扫描线i ) { 把ymin == i 的边结构->边表ET [i] }
将扫描线i的初值置为ET中非空元素的最小序号;
初始化活动边表AET为空;
for (各条扫描线i )
{
(1) 把边表ET[i]中的边结点插入AET表;
(2) 遍历AET表,把y max== i 的结点从AET中删除,并按x坐标值增序排列各边;
(3) 把配对交点区间(左闭右开)上的象素(x, i),用WritePixel (x, i, color)改写颜色值;
(4) 把AET中每条边结点的x值递增△x;
}
}