ROS2 第一个C++程序(talker和listener为例)
ament 安装
在ROS2安装完成后,查看ament是否安装成功,如果未安装成功使用
sudo apt install ament*
安装ament软件包
创建软件开发工作区目录
$ mkdir -p ~/ros2_ws/src/ros2_demo/src
CMakeLists.txt和package.xml文件
进入 ~/ros2_ws/src/目录
cd ~/ros2_ws/src/ros2_demo
手工创建package.xml文件,内容如下:
ros2_demo
0.0.0
Package containing examples of how to use the rcl API.
Hu Chunxu
Apache License 2.0
ament_cmake
rosidl_default_generators
example_interfaces
rcl
rmw_implementation
example_interfaces
rcl
rmw_implementation
rosidl_default_runtime
ament_cmake
手工创建CMakeLists.txt文件,内容如下:
cmake_minimum_required(VERSION 3.5)
project(ros2_demo)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
ament_package()
编译工作区
$cd ~/ros2_ws/
$ament build
![]()
编译完成后增加build和install两个目录
编写talker和listener代码
在 ~/ros2_ws/src/ros2_demo/src
创建ros2_talker.cpp文件,内容如下:
#include
#include
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
int main(int argc, char * argv[])
{
//ros::init(argc, argv, "talker");
rclcpp::init(argc, argv);
//ros::NodeHandle n;
auto node = rclcpp::Node::make_shared("talker");
// Set the QoS. ROS 2 will provide QoS profiles based on the following use cases:
// Default QoS settings for publishers and subscriptions (rmw_qos_profile_default).
// Services (rmw_qos_profile_services_default).
// Sensor data (rmw_qos_profile_sensor_data).
rmw_qos_profile_t custom_qos_profile = rmw_qos_profile_default;
// set the depth to the QoS profile
custom_qos_profile.depth = 7;
//ros::Publisher chatter_pub = n.advertise("chatter", 1000);
auto chatter_pub = node->create_publisher("chatter", custom_qos_profile);
//ros::Rate loop_rate(10);
rclcpp::WallRate loop_rate(2);
auto msg = std::make_shared();
auto i = 1;
//while (ros::ok())
while (rclcpp::ok())
{
msg->data = "Hello World: " + std::to_string(i++);
std::cout << "Publishing: '" << msg->data << "'" << std::endl;
//chatter_pub.publish(msg);
chatter_pub->publish(msg);
//ros::spinOnce();
rclcpp::spin_some(node);
//loop_rate.sleep();
loop_rate.sleep();
}
return 0;
}
创建ros2_listerner.cpp文件,内容如下:
#include
#include
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
//void chatterCallback(const std_msgs::String::ConstPtr& msg)
void chatterCallback(const std_msgs::msg::String::SharedPtr msg)
{
std::cout << "I heard: [" << msg->data << "]" << std::endl;
}
int main(int argc, char * argv[])
{
//ros::init(argc, argv, "listener");
rclcpp::init(argc, argv);
//ros::NodeHandle n;
auto node = rclcpp::Node::make_shared("listener");
//ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
auto sub = node->create_subscription(
"chatter", chatterCallback, rmw_qos_profile_default);
//ros::spin();
rclcpp::spin(node);
return 0;
}
修改CMakeLists.txt文件
进入~ros2_ws/src/ros2_demo/ 目录修改CMakeLists.txt文件,增加上面两个cpp的编译内容。
文件内容如下:
cmake_minimum_required(VERSION 3.5)
project(ros2_demo)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(ros2_talker src/ros2_talker.cpp)
ament_target_dependencies(ros2_talker rclcpp std_msgs)
add_executable(ros2_listerner src/ros2_listerner.cpp)
ament_target_dependencies(ros2_listerner rclcpp std_msgs)
install(TARGETS
ros2_talker
ros2_listerner
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
编译程序
在~/ros2_ws/ 目录下执行命令,进行程序编译
ament build
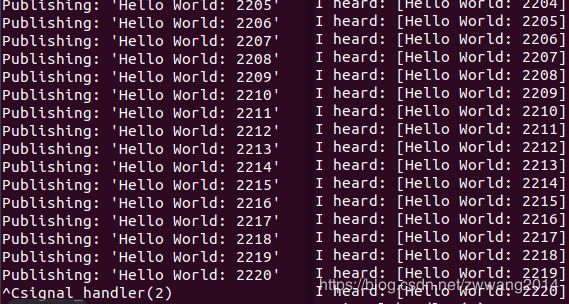
程序执行
执行
source ~/ros2_ws/install/setup.bash
ros2 run ros2_demo ros2_talker
ros2 run ros2_demo ros2_listerner
查看ros2 运行的节点列表
运行:
ros2 node list
结果:
talker
listener