为什么自己编的两帧之间视觉里程计用KITTI数据集评估,结果会如此得差呢?
背景介绍
学习了一段时间的SLAM,感觉对它的原理有了一定的了解,就想编写一个两帧之间的运动评估的demo,在这个demo中没有后端优化、建图和回环检测,只有两帧之间的运动估计。大概思路:采用双目相机,利用SGBM算法得到左目的视差图,进而恢复左目的深度信息,前后帧之间采用ORB特征匹配,采用RANSAC算法做误匹配剔除,采用奇异值分解的ICP方法来估计运动。
代码写好了之后,利用KITTI数据集进行验证,采用其Odometry模块中的00序列图片,发现估计的运动结果与KITTI基准值相差挺大的,因此想问问这是咋回事?
代码实现
1.相机的内参
查看KITTI的开发工具包,相机的内参值 f x , f y , c x , c y f_x,f_y,c_x,c_y fx,fy,cx,cy和双目的基线 b b b设置如下,
f x = 718.856 , f y = 718.856 , c x = 607.1928 , c y = 185.2157 f_x=718.856,f_y=718.856,c_x=607.1928,c_y=185.2157 fx=718.856,fy=718.856,cx=607.1928,cy=185.2157
b = 0.54 b=0.54 b=0.54
2.视差图的获取
通过Mat GetDisparity(string imgl, string imgr)函数来实现,函数名是GetDisparity,输入参数是imgl和imgr(左图和右图的路径),返回视差图,为Mat类型。函数内容如下:
//获得左右图像的视差
Mat GetDisparity(string imgl, string imgr){
Mat img_1 = imread(imgl, 0);
Mat img_2 = imread(imgr, 0);
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(
0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32); // 神奇的参数
cv::Mat disparity_sgbm, disparity;
sgbm->compute(img_1, img_2, disparity_sgbm);
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f);
return disparity;
}
此部分代码中的cv::Ptr是参照高翔博士的《视觉SLAM十四讲》书中5.4.1节双目视觉代码写出来的。
3.特征匹配
前后帧通过函数vector做特征匹配,函数名是qhmatch,输入参数是img1和img2(上一帧左图和当前帧左图的路径),返回配对的特征点坐标
( u i m g 1 , v i m g 1 , u i m g 2 , v i m g 2 ) (u_{img1},v_{img1},u_{img2},v_{img2}) (uimg1,vimg1,uimg2,vimg2)
类型为vector。函数内容如下:
//前后匹配函数
vector<Vector4d> qhmatch (string img1, string img2){
vector<Vector4d> points;
Mat img_1 = imread(img1, CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(img2, CV_LOAD_IMAGE_COLOR);
//-- 初始化
vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> matches;
matcher->match(descriptors_1, descriptors_2, matches);
//-- 第四步:匹配点对筛选
// 计算最小距离和最大距离
auto min_max = minmax_element(matches.begin(), matches.end(),
[](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; });
double min_dist = min_max.first->distance;
double max_dist = min_max.second->distance;
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
vector<DMatch> good_matches;
int i;
for ( i = 0; i < descriptors_1.rows; i++) {
if (matches[i].distance <= max(2 * min_dist, 30.0)) {
good_matches.push_back(matches[i]);
}
}
//保存匹配点对的坐标对应关系
Vector4d point;
for (i = 0; i < good_matches.size(); i++){
point << int(keypoints_1[good_matches[i].queryIdx].pt.x), int(keypoints_1[good_matches[i].queryIdx].pt.y),
int(keypoints_2[good_matches[i].trainIdx].pt.x), int(keypoints_2[good_matches[i].trainIdx].pt.y);
points.push_back(point);
}
return points;
}
4. 3D点集获取
通过第3步特征匹配,我们获得了配对点的坐标 ( u , v ) (u,v) (u,v),但这还不是三维坐标,因此,我们需要把它转换到相机坐标系下,这时利用如下公式,
[ X Y Z ] = f x b d [ f x 0 c x 0 f y c y 0 0 1 ] [ u v 1 ] \left[ \begin{matrix} X \\ Y \\ Z \end{matrix} \right] =\frac{f_xb}{d} \left[ \begin{matrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{matrix} \right] \left[ \begin{matrix} u \\ v \\ 1 \end{matrix} \right] ⎣⎡XYZ⎦⎤=dfxb⎣⎡fx000fy0cxcy1⎦⎤⎣⎡uv1⎦⎤
其中 d d d就是第2步视差图的获取中的视差。
5. RANSAC
虽然在特征匹配过程中,我们通过if (matches[i].distance <= max(2 * min_dist, 30.0)) { good_matches.push_back(matches[i]); }排除了一些误匹配值,但任存在误匹配值,因此我们需要通过RANSAC彻底排除误匹配值。RANSAC的算法过程如下图所示

代码实现如下:
double RANSAC_threshold, RANSAC_iterations;
RANSAC_iterations = 1000;//设置RANSAC迭代次数
RANSAC_threshold = 0.1;//设置RANSAC阈值
vector<Vector6d> inliers_best, inliers_current;
int number_inliers_best = 0;
Matrix3d matrix_R_best;
Matrix<double, 3, 1> matrix_t_best;
int k;
for (k = 0; k < RANSAC_iterations; k++){
int number1,number2,number3,number4;
number1 = rand() % pointscam.size();
number2 = rand() % pointscam.size();
number3 = rand() % pointscam.size();
number4 = rand() % pointscam.size();
Vector6d a,b,c,d;
a = pointscam[number1];
b = pointscam[number2];
c = pointscam[number3];
d = pointscam[number4];
Matrix<double, 12, 12> matrix_A;
matrix_A << a(0), a(1), a(2), 0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, a(0), a(1), a(2), 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, a(0), a(1), a(2), 0, 0, 1,
b(0), b(1), b(2), 0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, b(0), b(1), b(2), 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, b(0), b(1), b(2), 0, 0, 1,
c(0), c(1), c(2), 0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, c(0), c(1), c(2), 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, c(0), c(1), c(2), 0, 0, 1,
d(0), d(1), d(2), 0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, d(0), d(1), d(2), 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, d(0), d(1), d(2), 0, 0, 1;
Matrix<double, 12, 1> matrix_b;
matrix_b << a(3), a(4), a(5), b(3), b(4), b(5), c(3), c(4), c(5), d(3), d(4), d(5);
Matrix<double, 12, 1> x = matrix_A.colPivHouseholderQr().solve(matrix_b);
Matrix3d matrix_R;
matrix_R << x(0), x(1), x(2),
x(3), x(4), x(5),
x(6), x(7), x(8);
Matrix<double, 3, 1> matrix_t;
matrix_t << x(9), x(10), x(11);
inliers_current.clear();
for (int i = 0; i < pointscam.size(); i++) {
if (i == number1 || i == number2 || i == number3 || i == number4) continue;
Vector3d delta_location;
delta_location = Vector3d(pointscam[i](3), pointscam[i](4), pointscam[i](5)) - matrix_R * Vector3d(pointscam[i](0), pointscam[i](1), pointscam[i](2)) - matrix_t;
double delta_location_norm;
delta_location_norm = delta_location.norm();
if (delta_location_norm < RANSAC_threshold) {
inliers_current.push_back(pointscam[i]);
}
}
inliers_current.push_back(pointscam[number1]);
inliers_current.push_back(pointscam[number2]);
inliers_current.push_back(pointscam[number3]);
inliers_current.push_back(pointscam[number4]);
if (inliers_current.size() > number_inliers_best){
number_inliers_best = inliers_current.size();
inliers_best.clear();
inliers_best = inliers_current;
matrix_R_best = matrix_R;
matrix_t_best = matrix_t;
}
}
其中pointscam为vector,记录了已匹配的三维点集。
6. ICP估计位姿
在此,我们已经得到了,经过RANSAC之后的已匹配的三维点集,接下来我们用基于奇异值分解的ICP方法来估计位姿,即旋转矩阵 R R R和平移向量 t t t。此部分代码原理参照高翔《视觉SLAM十四讲》中7.9节 3D-3D:ICP。
int N = inliers_best.size();
Vector6d p;
for (int i = 0; i < N; i++){
p += inliers_best[i];
}
p = p / N;//点集质心
vector<Vector6d> q(N);
for(int i = 0; i < N; i++){
q[i] = inliers_best[i] - p;//去质心化坐标
}
Matrix3d W ;
for (int i = 0; i < N; i++){
W += Vector3d( q[i](3), q[i](4), q[i](5) ) * Vector3d( q[i](0), q[i](1), q[i](2) ).transpose();
}
cout << "W=" << endl;
cout << W << endl;
//对W进行奇异值分解
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
Matrix3d R;
R = U * V.transpose();
if (R.determinant() < 0) R = -R;
Vector3d t;
t = Vector3d( p(3), p(4), p(5) ) - R * Vector3d( p(0), p(1), p(2) );
cout << "由ICP得到的旋转矩阵R=\n" << R << endl;
cout << "由ICP得到的平移向量t=\n" << t << endl;
7. 小结
通过以上6步,我们实现了一个基本的双目两帧之间的视觉里程计!
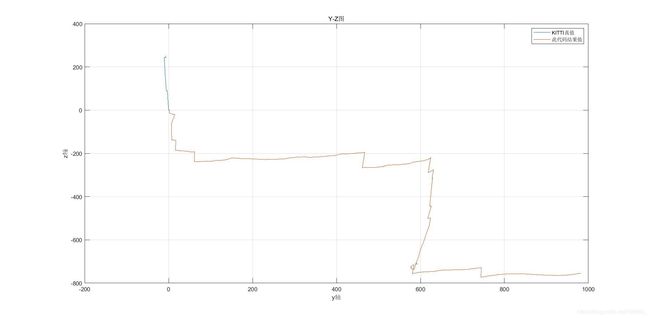
结果评估
来到问题的关键了,代码写好了之后,我利用KITTI数据集中的Odometry模块00序列中000000.png-000600.png进行效果评估,结果发现效果太差了。我们来对比平移向量 t t t:KITTI的真值,此双目两帧之间VO的结果值。


以及000000.png-000010.png的平移向量 t t t数值比较,
K I T T I 真 值 KITTI真值 KITTI真值
[ − 0.0469 − 0.0468 − 0.0469 − 0.0468 − 0.0469 − 0.0468 − 0.0469 − 0.0468 − 0.0469 − 0.0469 − 0.0284 − 0.0284 − 0.0284 − 0.0284 − 0.0284 − 0.0284 − 0.0284 − 0.0284 − 0.0284 − 0.0284 0.8587 0.8576 0.8587 0.8577 0.8587 0.8577 0.8588 0.8577 0.8586 0.8589 ] \left[ \begin{matrix} -0.0469 & -0.0468 & -0.0469 & -0.0468 & -0.0469 & -0.0468 & -0.0469 & -0.0468 & -0.0469 & -0.0469 \\ -0.0284 & -0.0284 & -0.0284 & -0.0284 & -0.0284 & -0.0284 & -0.0284 & -0.0284 & -0.0284 & -0.0284 \\ 0.8587 & 0.8576 & 0.8587 & 0.8577 & 0.8587 & 0.8577 & 0.8588 & 0.8577 & 0.8586 & 0.8589 \end{matrix} \right] ⎣⎡−0.0469−0.02840.8587−0.0468−0.02840.8576−0.0469−0.02840.8587−0.0468−0.02840.8577−0.0469−0.02840.8587−0.0468−0.02840.8577−0.0469−0.02840.8588−0.0468−0.02840.8577−0.0469−0.02840.8586−0.0469−0.02840.8589⎦⎤
其中每一列都是一个平移向量。
此 代 码 结 果 值 此代码结果值 此代码结果值
[ 0.5571 0.9929 3.9490 4.9649 6.9377 8.2413 7.9446 8.9122 8.3287 9.1118 1.3609 0.1563 1.1231 0.0765 − 0.5173 − 0.5405 − 0.5820 0.7446 0.1349 0.4579 − 0.2270 − 0.7007 0.3834 − 0.2695 0.6908 1.2347 1.4882 2.9503 3.8896 3.7126 ] \left[ \begin{matrix} 0.5571 & 0.9929 & 3.9490 & 4.9649 & 6.9377 & 8.2413 & 7.9446 & 8.9122 & 8.3287 & 9.1118 \\ 1.3609 & 0.1563 & 1.1231 & 0.0765 & -0.5173 & -0.5405 & -0.5820 & 0.7446 & 0.1349 & 0.4579 \\ -0.2270 & -0.7007 & 0.3834 & -0.2695 & 0.6908 & 1.2347 & 1.4882 & 2.9503 & 3.8896 & 3.7126 \end{matrix} \right] ⎣⎡0.55711.3609−0.22700.99290.1563−0.70073.94901.12310.38344.96490.0765−0.26956.9377−0.51730.69088.2413−0.54051.23477.9446−0.58201.48828.91220.74462.95038.32870.13493.88969.11180.45793.7126⎦⎤
由以上结果可知,此代码得到的平移矩阵 t t t结果太差了,可原因是什么呢?虽说我没有加入后端优化、建图和回环检测,可不应该一开始结果就偏了呀,原因是什么呢?