4412开发板学习之Linux驱动开发(五):4412MMU及GPIO操作(点灯)
4412MMU及GPIO操作(点灯)
- 物理地址与虚拟地址
- 与传统MCU的对比
- 4412中的物理地址
- MMU内存管理单元
- 存储器分类
- 4412中的存储器映射
- 物理地址和虚拟地址
- 其他的地址概念
- GPIO操作
- GPIO初始化
- EXYNOS4_GPL2(0)的分析
- GPIO的数量
- S5P_VA_GPIO2
- 虚拟地址与物理地址的映射
- GPIO初始化流程
- LED驱动程序
- 用到的头文件
- 管脚调用、赋值以及配置
- 点灯实验
- 硬件连接
- 生成设备节点的代码
- 生成设备节点代码分析
- 应用程序代码
- 应用程序代码分析
- 实验效果
- 总结
物理地址与虚拟地址
与传统MCU的对比
传统的MCU直接操作寄存器,主要原因是本身的主频并不太高
而现代的CPU由于速度远快于存储设备所以通过Cache、内存来进行缓冲,解决速度不匹配的问题
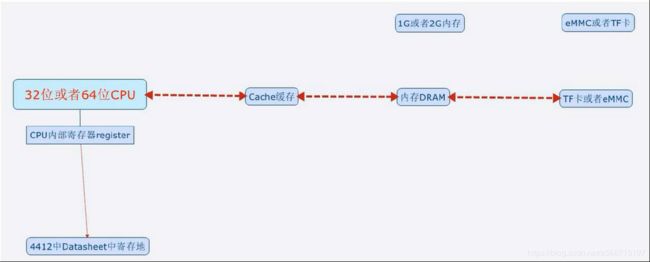
4412中的物理地址
- CPU内部寄存器register
- eMMC
- TF卡
MMU内存管理单元
MMU是中央处理器中用来管理虚拟存储器、物理存储器的控制线路,同时负责虚拟地址映射为物理地址
为解决代码需要的内存大于物理内存的问题
基本思路:数据和堆栈的大小总和可以超过物理存储器的大小,操作系统把当前使用的部分留在内存中,其它的保留在硬盘上
地址范围
- 32位0-2^32
- 64位0-2^64
页和页帧
- 虚拟地址空间被划分为页的单位,相应的物理地址空间被划分为页帧,这就是分页机制。页的大小必须一样,页帧的大小也必须一样
一台32位机器最大可运行4G大小的程序,前提是这台机器首先要有4G的存储空间
存储器分类
- ROM
- RAM
- Cache
- SFR:特殊寄存器
4412中的存储器映射
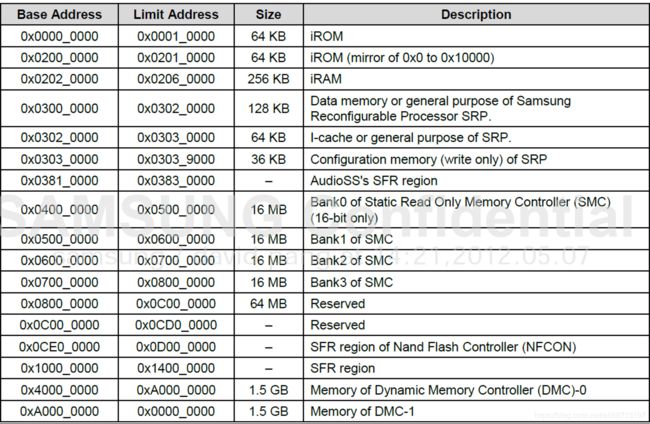
iROM
- 存储三星的一段固化代码,用于启动Uboot
iRAM
- iROM是不能运行程序的,三星固化的代码在iRAM中运行
i-Cache
- CPU和内存之间的通信
SFR region
- 特殊寄存器,GPIO、中断、总线等等
Memory of Dynamic Memory Controller
- 动态内存控制器,
Linux内核中函数ioremap,返回的地址会在这个区间之内(0x4000000-0x00000000)。
1G 内存的话是0x40000000-0x80000000
内存是有物理地址的
物理地址和虚拟地址
虚拟地址指的是一种通信技术
虚拟地址的返回和内存的物理地址会重合
其他的地址概念
Base Address
- 某一类寄存器的其实地址,一个寄存器加上偏移地址,就是这个寄存器的物理地址
Offset
- 偏移地址
总线的地址
- 和内存地址虚拟地址毫无关系,是总线用于区分设备的
GPIO操作
GPIO初始化
查看GPIO部分是否被编译进内核:ls drivers/gpio/*.o

有.o文件就说明已经被编译
在gpio-exynos4.c最下面一行
core_initcall(exynos4_gpiolib_init);
在linux初始化过程中会调用的函数
初始化函数调用exynos4_gpiolib_init,该函数中重要的一句
chip = exynos4_gpio_common_4bit;
exynos4_gpio_common_4bit结构体部分
static struct s3c_gpio_chip exynos4_gpio_common_4bit[] = {
#endif
{
.base = S5P_VA_GPIO1,
.eint_offset = 0x0,
.group = 0,
.chip = {
.base = EXYNOS4_GPA0(0),
.ngpio = EXYNOS4_GPIO_A0_NR,
.label = "GPA0",
},
}, {
.base = (S5P_VA_GPIO1 + 0x20),
.eint_offset = 0x4,
.group = 1,
.chip = {
.base = EXYNOS4_GPA1(0),
.ngpio = EXYNOS4_GPIO_A1_NR,
.label = "GPA1",
},
}, {
.base = (S5P_VA_GPIO1 + 0x40),
.eint_offset = 0x8,
.group = 2,
.chip = {
.base = EXYNOS4_GPB(0),
.ngpio = EXYNOS4_GPIO_B_NR,
.label = "GPB",
},
}, {
.base = (S5P_VA_GPIO1 + 0x60),
.eint_offset = 0xC,
.group = 3,
.chip = {
.base = EXYNOS4_GPC0(0),
.ngpio = EXYNOS4_GPIO_C0_NR,
.label = "GPC0",
},
},
结构体中S5P_VA_XXXX的基地址定义,VA一般用来代表虚拟地址,PV用来代表物理地址

{
.base = (S5P_VA_GPIO2 + 0x100),//基地址和偏移地址相加
.eint_offset = 0x20,//和中断相关
.group = 22,//Linux内核处理中的分组
.chip = {
.base = EXYNOS4_GPL2(0),//宏定义 EXYNOS4_GPL2(0)赋值给初始化函数
.ngpio = EXYNOS4_GPIO_L2_NR,//表示这一小组有几个GPIO
.label = "GPL2",//程序员需要关心的标志
},
EXYNOS4_GPL2(0)的分析
#define EXYNOS4_GPL2(_nr) (EXYNOS4_GPIO_L2_START + (_nr))
我们再看一下EXYNOS4_GPIO_L2_STAR是什么
EXYNOS4_GPIO_L2_START = EXYNOS4_GPIO_NEXT(EXYNOS4_GPIO_L1),
EXYNOS4_GPIO_NEXT的宏定义
#define EXYNOS4_GPIO_NEXT(__gpio) ((__gpio##_START) + (__gpio##_NR) + CONFIG_S3C_GPIO_SPACE + 1)
GPIO的数量
GPIO数量:EXYNOS4_GPIO_L2_NR
也可以通过手册来查找
S5P_VA_GPIO2
#define S5P_VA_GPIO1 S5P_VA_GPIO
#define S5P_VA_GPIO2 S3C_ADDR(0x02240000)
#define S5P_VA_GPIO3 S3C_ADDR(0x02280000)
#define S5P_VA_GPIO4 S3C_ADDR(0x022C0000)
四个GPIO bank/part
虚拟地址与物理地址的映射
#define S3C_ADDR(x) ((void __iomem __force *)S3C_ADDR_BASE + (x))
#define S3C_ADDR_BASE 0xF6000000
这是给分配的虚拟地址
虚拟地址与物理地址的映射
static struct map_desc exynos4_iodesc[] __initdata
{
.virtual = (unsigned long)S5P_VA_GPIO2,//表示虚拟地址
.pfn = __phys_to_pfn(EXYNOS4_PA_GPIO2),//表示物理地址
.length = SZ_4K,//表示映射宽度
.type = MT_DEVICE,
}
#define EXYNOS4_PA_GPIO2 0x11000000//物理地址
GPIO初始化流程
平台文件分别定义好物理地址和虚拟地址
物理地址和虚拟地址之间映射
在初始化中,引入了程序员需要使用的GPIO宏定义,并将宏定义装入chip结构体中
通过调用gpio-cfg.h中的s3c_gpio_cfgpin函数,用来给GPIO做配置
LED驱动程序
用到的头文件
Linux中申请GPIO的头文件
- #include
三星平台的GPIO配置函数头文件
- arch/arm/plat-samsung/include/plat/gpio-cfg.h
- #include
三星平台EXYNOS系列平台,GPIO配置参数宏定义头文件
-
arch/arm/plat-samsung/include/plat/gpio-cfg.h
-
#include
-
#include
三星平台4412平台,GPIO宏定义头文件 -
arch/arm/mach-exynos/include/mach/gpio-exynos4.h
-
#include
-
包括4412处理器所有的GPIO的宏定义
管脚调用、赋值以及配置
LinuxGPIO申请函数和赋值函数
- gpio_request
- gpio_set_value
三星平台配置GPIO函数
- s3c_gpio_cfgpin
GPIO配置输出模式的宏变量
- S3C_GPIO_OUTPUT
点灯实验
硬件连接

在核心板原理图中查找芯片引脚
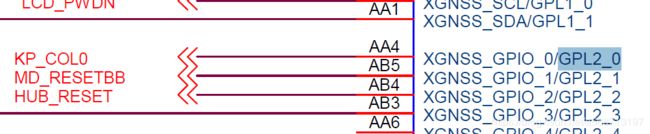
所以我们要操作GPL2_0,当它输出高定平的时候LED亮,当它输出低电平的时候LED灭。
生成设备节点的代码
#include 生成设备节点代码分析
在上面的代码中我们生成了设备节点“hello_ctl_dev”,并且我们写了底层的操作,当我们生成设备节点成功时,会进入probe(初始化)函数,然后在probe函数中申请GPIO设备,初始化GPIO,并且将GPIO置0,本IO口在Uboot中是置一的,所以说执行后应当灯灭。
应用程序代码
#include 应用程序代码分析
这个应用程序代码和上次的应用程序代码没有什么不同,就是打开文件,然后操作IO,最后关闭文件。
如果执行成功的话,灯会以3秒的间隔闪烁
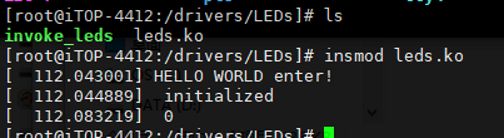
实验效果
生成设备节点
此时LED熄灭
查看设备节点
![]()
生成设备节点成功
执行应用程序

可以看到LED闪烁
实验成功
总结
以前在单片机上点灯就是最简单的操作,但是上了ARM+Linux,发现点灯也并不容易,学了这么久了终于把灯点着了
学习驱动的过程中很大一部分时间是用于熟悉库函数的使用
写驱动一般性的方法都是先了解和掌握对应驱动相关的库函数
在掌握驱动库函数的基础上,掌握Linux架构,驱动就自然写出来或者很容易就移植成功