27 Deep Belief Network
Deep Belief Network 是Hinton 在2006 年提出的方法,应用在分类问题上的效果明显好过SVM。它的诞生有着重要的意义,这意味着打开了Deep Learning 的大门,把连接主义推上了历史的舞台,给人类带来了希望。
1 Introduction
首先,来看看Deep Belief Network 这个名字的含义,Belief Network 实际上就是Bayes Network(有向图模型),而Deep 的含义就很简单了,代表有很多层。所以,从字面上理解,Deep Belief Network可以认为是有很多层的有向图模型。Deep Belief Network 的概率图模型如下所示: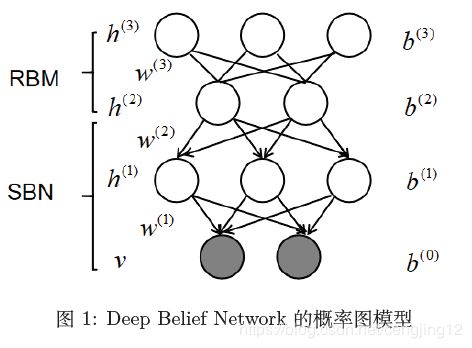
从上述图中,可以看出DBN 是一个混合模型,上面是Restricted Boltzmann Model(RBM)模型,下面是一个Sigmoid Belief Network(SBN)。而每个节点都服从0/1 的伯努利分布,实际上就是一个分层模型。深层的含义,我们将会在下文中描述。注意,这里的 w w w 是用来描述节点直接连接权重的矩阵。
1.1 SBN 简要回顾
Sigmoid Belief Network 的概率图模型如下所示:
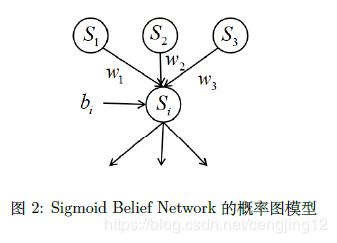
其中,
P ( S i = 1 ) = 1 1 + exp { b i + w 1 s 1 + w 2 s 2 + w 3 s 3 } ( 1 ) P\left(S_{i}=1\right)=\frac{1}{1+\exp \left\{b_{i}+w_{1} s_{1}+w_{2} s_{2}+w_{3} s_{3}\right\}} \ \ \ \ \ \ \ (1) P(Si=1)=1+exp{bi+w1s1+w2s2+w3s3}1 (1)
1.2 DBN 的联合概率分布
在之前的章节我们详细的描述过了,在使用极大似然估计法中基本离不开求联合概率分布。所以,这里需要求DBN 的联合概率分布,而求联合概率分布最终的就是因子分解。那么,我们首先要理顺一下各层之间的依赖关系。显然,v 层只和 h ( 1 ) h^{(1)} h(1) 有关, h ( 1 ) h^{(1)} h(1) 层只和 h ( 2 ) , h^{(2)}, h(2), 那么有:
P ( v , h ( 1 ) , h ( 2 ) , h ( 3 ) ) = P ( v ∣ h ( 1 ) , h ( 2 ) , h ( 3 ) ) P ( h ( 1 ) , h ( 2 ) , h ( 3 ) ) = P ( v ∣ h ( 1 ) ) P ( h ( 1 ) , h ( 2 ) , h ( 3 ) ) = P ( v ∣ h ( 1 ) ) P ( h ( 1 ) ∣ h ( 2 ) , h ( 3 ) ) P ( h ( 2 ) , h ( 3 ) ) = ∏ i P ( v i ∣ h ( 1 ) ) ∏ j P ( h j ( 1 ) ∣ h ( 2 ) , h ( 3 ) ) P ( h ( 2 ) , h ( 3 ) ) ( 2 ) \begin{aligned} P\left(v, h^{(1)}, h^{(2)}, h^{(3)}\right) &=P\left(v | h^{(1)}, h^{(2)}, h^{(3)}\right) P\left(h^{(1)}, h^{(2)}, h^{(3)}\right) \\ &=P\left(v | h^{(1)}\right) P\left(h^{(1)}, h^{(2)}, h^{(3)}\right) \\ &=P\left(v | h^{(1)}\right) P\left(h^{(1)} | h^{(2)}, h^{(3)}\right) P\left(h^{(2)}, h^{(3)}\right) \\ &=\prod_{i} P\left(v_{i} | h^{(1)}\right) \prod_{j} P\left(h_{j}^{(1)} | h^{(2)}, h^{(3)}\right) P\left(h^{(2)}, h^{(3)}\right) \end{aligned} \ \ \ \ \ \ (2) P(v,h(1),h(2),h(3))=P(v∣h(1),h(2),h(3))P(h(1),h(2),h(3))=P(v∣h(1))P(h(1),h(2),h(3))=P(v∣h(1))P(h(1)∣h(2),h(3))P(h(2),h(3))=i∏P(vi∣h(1))j∏P(hj(1)∣h(2),h(3))P(h(2),h(3)) (2)
下一步则是将这三个部分分布表示。根据公式 的结论,可以类比的得出:
P ( v i ∣ h ( 1 ) ) = sigmoid ( ( W : , i ( 1 ) ) T ⋅ h ( 1 ) + b i ( 0 ) ) P ( h j ( 1 ) ∣ h ( 2 ) ) = sigmoid ( ( W : , j ( 2 ) ) T ⋅ h ( 2 ) + b j ( 1 ) ) \begin{array}{l} P\left(v_{i} | h^{(1)}\right)=\operatorname{sigmoid}\left(\left(W_{:, i}^{(1)}\right)^{T} \cdot h^{(1)}+b_{i}^{(0)}\right) \\ P\left(h_{j}^{(1)} | h^{(2)}\right)=\operatorname{sigmoid}\left(\left(W_{:, j}^{(2)}\right)^{T} \cdot h^{(2)}+b_{j}^{(1)}\right) \end{array} P(vi∣h(1))=sigmoid((W:,i(1))T⋅h(1)+bi(0))P(hj(1)∣h(2))=sigmoid((W:,j(2))T⋅h(2)+bj(1))
而 h ( 2 ) h^{(2)} h(2) 和 h ( 3 ) h^{(3)} h(3) 之间是 R B M \mathrm{RBM} RBM 模型,沿用在 R B M \mathrm{RBM} RBM 那一章讲的 Boltzmann Distribution 可以得到:
P ( h ( 2 ) , h ( 3 ) ) = 1 Z exp { ( h ( 3 ) ) T w ( 3 ) h ( 2 ) + ( h ( 2 ) ) T b ( 2 ) + ( h ( 3 ) ) T b ( 3 ) } P\left(h^{(2)}, h^{(3)}\right)=\frac{1}{Z} \exp \left\{\left(h^{(3)}\right)^{T} w^{(3)} h^{(2)}+\left(h^{(2)}\right)^{T} b^{(2)}+\left(h^{(3)}\right)^{T} b^{(3)}\right\} P(h(2),h(3))=Z1exp{(h(3))Tw(3)h(2)+(h(2))Tb(2)+(h(3))Tb(3)}
其中参数为:
θ = { W ( 1 ) , W ( 2 ) , W ( 3 ) , b ( 0 ) , b ( 1 ) , b ( 2 ) , b ( 3 ) } \theta=\left\{W^{(1)}, W^{(2)}, W^{(3)}, b^{(0)}, b^{(1)}, b^{(2)}, b^{(3)}\right\} θ={W(1),W(2),W(3),b(0),b(1),b(2),b(3)}
1.3 小结
本小节,我们讲述了DBN 的Representation,而很多小伙伴会疑惑为什么是一个hybrid model,为什么要一半用有向图,一般用无向图,这样做有什么好处,作者是如何思考出来的,深层含义是什么?这些问题,将在下一节进行描述。
2 DBN 叠加动机
上一节弄清楚了DBN 的model representation,这一小节主要是直觉性的介绍一个DBN 的思路。为什么可以混在一起,为什么Deep Belief Network 可以看成Stacking RBM。我们将从RBM 引出DBN 的模型。
2.1 改进RBM 的原因
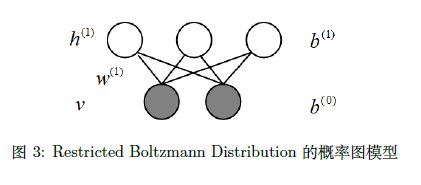
首先,我们看看原始的RBM 模型的表达方式,RBM 的求解在“直面配分函数”那章讲到了,是使用对比散度的方法求解。概率图模型如下图所示:
首先,回忆一下当时是如何进行求解的。通过一系列的化简,得到了log likelihood gradient 的表达形式:
∂ ∂ w i j log P ( v ) = ∑ h ∑ v P ( h , v ) ( − h i v j ) − ∑ h P ( h ∣ v ) ( − h i v j ) = ∑ h P ( h ∣ v ) h i v j − ∑ h ∑ v P ( h , v ) h i v j ( 6 ) \begin{aligned} \frac{\partial}{\partial w_{i j}} \log P(v) &=\sum_{h} \sum_{v} P(h, v)\left(-h_{i} v_{j}\right)-\sum_{h} P(h | v)\left(-h_{i} v_{j}\right) \\ &=\sum_{h} P(h | v) h_{i} v_{j}-\sum_{h} \sum_{v} P(h, v) h_{i} v_{j} \end{aligned} \ \ \ \ \ \ \ (6) ∂wij∂logP(v)=h∑v∑P(h,v)(−hivj)−h∑P(h∣v)(−hivj)=h∑P(h∣v)hivj−h∑v∑P(h,v)hivj (6)
但是公式 (6) 的计算过于复杂,斯本是 intractable。所灯提出了用结合梯度上升法的 Gibbs 采样来求 梯度,从而使得 P(v) 的 Log Likelihood 达到最大,公式如下所示:
Δ w i j ← − Δ w i j + ∂ ∂ w i j log P ( v ) ∂ ∂ w i j log P ( v ) = P ( h i = 1 ∣ v ( 0 ) ) v j ( 0 ) − P ( h i = 1 ∣ v ( k ) ) v j ( k ) \begin{array}{c} \Delta w_{i j} \leftarrow-\Delta w_{i j}+\frac{\partial}{\partial w_{i j}} \log P(v) \\ \frac{\partial}{\partial w_{i j}} \log P(v)=P\left(h_{i}=1 | v^{(0)}\right) v_{j}^{(0)}-P\left(h_{i}=1 | v^{(k)}\right) v_{j}^{(k)} \end{array} Δwij←−Δwij+∂wij∂logP(v)∂wij∂logP(v)=P(hi=1∣v(0))vj(0)−P(hi=1∣v(k))vj(k)
那么,按DBN 的叠加方式一定会取得更好的效果吗?结果是不用废话的。需要明确一点,引入RBM是为了探究观测变量的数据结构的关系,其中未观察变量被看作观察变量发生的原因。
所以,模型的关注重点实际上是 v v v,而 h h h 不过是我们为了探究 v v v 的数据结构和发生的原因,所做的模型假设而已。 v v v 是没有标签的数据,可以认为是RBM 方法生成的,那么这个RBM 有没有办法改进,让生成的数据更接近真实分布?
2.2 RBM 的改进
根据图 3 可知,
P ( v ) = ∑ h ( 1 ) P ( v , h ( 1 ) ) = ∑ h ( 1 ) P ( h ( 1 ) ) P ( v ∣ h ( 1 ) ) P(v)=\sum_{h^{(1)}} P\left(v, h^{(1)}\right)=\sum_{h^{(1)}} P\left(h^{(1)}\right) P\left(v | h^{(1)}\right) P(v)=h(1)∑P(v,h(1))=h(1)∑P(h(1))P(v∣h(1))
通常 P ( h ( 1 ) ) P\left(h^{(1)}\right) P(h(1)) 看成是 prior 先验, P ( v ∣ h ( 1 ) ) P\left(v | h^{(1)}\right) P(v∣h(1)) 则看成是一个生成过程。RBM 在无向图中并没有箭头,无 向图可以看成是一个双向的有向图,如下所示:
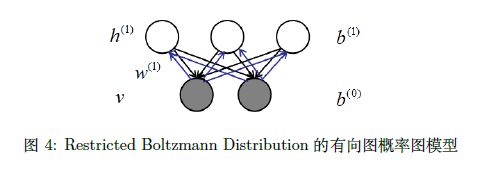
这样,将无向图改写成有向图,可以把概率图分成 h → v h → v h→v 和 v → h v → h v→h 两个过程。两个过程的权重都是一样的。那么假定在RBM 已经学习出来的情况下( w ( 1 ) w^{(1)} w(1) 的参数是确定的), P ( v ∣ h ( 1 ) ) P(v|h^{(1)}) P(v∣h(1)) 可以看成是 h → v h → v h→v,显示是不变得,而 P ( h ( 1 ) ) P(h^{(1)}) P(h(1)) 显然也是确定的,和 v → h v → h v→h 过程相关, w ( 1 ) w^{(1)} w(1) 和 v v v 都是确定的。
由于 P ( v ) = Σ h ( 1 ) P ( h ( 1 ) ) P ( v ∣ h ( 1 ) ) P(v) =Σ_{h^{(1)}} P(h^{(1)})P(v|h^{(1)}) P(v)=Σh(1)P(h(1))P(v∣h(1)), P ( h ( 1 ) ) P(h^{(1)}) P(h(1))和 P ( v ∣ h ( 1 ) ) P(v|h^{(1)}) P(v∣h(1))都是确定的,那么P(v) 就是确定的。
那么,可以衍生出一种很自然的想法,可不可以不用 w w w 来表示 P ( h ( 1 ) ) P(h^{(1)}) P(h(1)),给 P ( h ( 1 ) ) P(h^{(1)}) P(h(1))重新赋一组参数,create 一个新的模型来对 P ( h ( 1 ) ) P(h^{(1)}) P(h(1)) 重新建模,用另一个RBM 来表示 P ( h ( 1 ) ) P(h^{(1)}) P(h(1)),从而通过提高 P ( h ( 1 ) ) P(h^{(1)}) P(h(1))的办法来提高 P ( v ) P(v) P(v)。
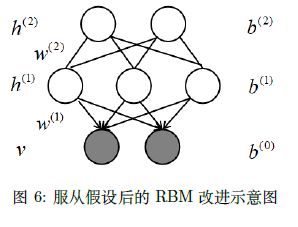
那么,怎么学习呢?可以添加一层RBM,这样就可以给P(h(1)) 重新赋一组参数,然后通过新的RBM 参数进行优化的方式来提高 P ( h ( 1 ) ) P(h^{(1)}) P(h(1))。如下图所示:

由此,可以认为这样一个模型,比原来的RBM 更好,因为假设 P ( v ∣ b ( 1 ) ) P(v|b^{(1)}) P(v∣b(1)) 是固定的,实际可以优化 P ( h ( 1 ) ) P(h^{(1)}) P(h(1)) 来进一步提高模型的性能。同样的思路,可以用同样的办法来优化 P ( h ( 2 ) ) P(h^{(2)}) P(h(2)),所以就达到了不停的往上加的效果。
我们希望在训练 h ( 1 ) h^{(1)} h(1) 层的时候,希望 v v v 不会对 h ( 1 ) h^{(1)} h(1) 造成影响,否则计算复杂度就太高了。所以,就假设在训练KaTeX parse error: Expected '}', got 'EOF' at end of input: h^{(1)的过程中和 v v v 无关,所以概率图模型就变为:
实际上讲解到了这里,DBN 的演变模型大概都已经出来了。我觉得这个系列演变的思路在于关于 P ( h ( 1 ) ) P(h^{(1)}) P(h(1)) 和 P ( v ∣ h ( 1 ) ) P(v|h^{(1)}) P(v∣h(1)) 两个部分的计算分开优化,从而发挥最大的效果,尽可能的提高模型的性能。
2.3 为什么DBM 会更好?
下面将给出推导来证明,为什么添加DBM 会使得模型变得更好。首先计算一些RBM 的下界。
log P ( v ) = log ∑ h ( 1 ) P ( v , h ( 1 ) ) = log ∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) P ( v , h ( 1 ) ) Q ( h ( 1 ) ∣ v ) = log E Q ( h ( 1 ) ∣ v ) [ P ( v , h ( 1 ) ) Q ( h ( 1 ) ∣ v ) ] ≥ E Q ( h ( 1 ) ∣ v ) log [ P ( v , h ( 1 ) ) Q ( h ( 1 ) ∣ v ) ] ( 琴生不等式 ) = ∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) [ log P ( v , h ( 1 ) ) − log Q ( h ( 1 ) ∣ v ) ] = ∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) [ log P ( v ∣ h ( 1 ) ) + log P ( h ( 1 ) ) − log Q ( h ( 1 ) ∣ v ) ] \begin{aligned} \log P(v) &=\log \sum_{h^{(1)}} P\left(v, h^{(1)}\right) \\ &=\log \sum_{h^{(1)}} Q\left(h^{(1)} | v\right) \frac{P\left(v, h^{(1)}\right)}{Q\left(h^{(1)} | v\right)} \\ &=\log \mathbb{E}_{Q\left(h^{(1)} | v\right)}\left[\frac{P\left(v, h^{(1)}\right)}{Q\left(h^{(1)} | v\right)}\right] \\ & \geq \mathbb{E}_{Q\left(h^{(1)} | v\right)} \log \left[\frac{P\left(v, h^{(1)}\right)}{Q\left(h^{(1)} | v\right)}\right](\text { 琴生不等式 }) \\ &=\sum_{h^{(1)}} Q\left(h^{(1)} | v\right)\left[\log P\left(v, h^{(1)}\right)-\log Q\left(h^{(1)} | v\right)\right] \\ &=\sum_{h^{(1)}} Q\left(h^{(1)} | v\right)\left[\log P\left(v | h^{(1)}\right)+\log P\left(h^{(1)}\right)-\log Q\left(h^{(1)} | v\right)\right] \end{aligned} logP(v)=logh(1)∑P(v,h(1))=logh(1)∑Q(h(1)∣v)Q(h(1)∣v)P(v,h(1))=logEQ(h(1)∣v)[Q(h(1)∣v)P(v,h(1))]≥EQ(h(1)∣v)log[Q(h(1)∣v)P(v,h(1))]( 琴生不等式 )=h(1)∑Q(h(1)∣v)[logP(v,h(1))−logQ(h(1)∣v)]=h(1)∑Q(h(1)∣v)[logP(v∣h(1))+logP(h(1))−logQ(h(1)∣v)]
那么, ∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) [ log P ( v ∣ h ( 1 ) ) + log P ( h ( 1 ) ) − log Q ( h ( 1 ) ∣ v ) ] \sum_{h^{(1)}} Q\left(h^{(1)} | v\right)\left[\log P\left(v | h^{(1)}\right)+\log P\left(h^{(1)}\right)-\log Q\left(h^{(1)} | v\right)\right] ∑h(1)Q(h(1)∣v)[logP(v∣h(1))+logP(h(1))−logQ(h(1)∣v)] 就是原来的 R B M \mathrm{RBM} RBM 的下界。在 R B M \mathrm{RBM} RBM中当整个模型训练完毕之后, w w w 已经是确定的,那么 log P ( v ∣ h ( 1 ) ) \log P\left(v | h^{(1)}\right) logP(v∣h(1)) 和 log Q ( h ( 1 ) ∣ v ) \log Q\left(h^{(1)} | v\right) logQ(h(1)∣v) 都可以看成是一个 常数,而 Q ( h ( 1 ) ∣ v ) Q\left(h^{(1)} | v\right) Q(h(1)∣v) 是一个后验。所以下界被我们写为:
∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) log P ( h ( 1 ) ) + C ( 11 ) \sum_{h^{(1)}} Q\left(h^{(1)} | v\right) \log P\left(h^{(1)}\right)+C \ \ \ \ (11) h(1)∑Q(h(1)∣v)logP(h(1))+C (11)
在 RBM 中 P ( h ( 1 ) ) P\left(h^{(1)}\right) P(h(1)) 是周定的,而在 DBM 中并不是固定的,而将通过优化 P ( h ( 1 ) ) P\left(h^{(1)}\right) P(h(1)) 来提升模型的性 能。而 h ( 2 ) h^{(2)} h(2) 的目的就是令 h ( 1 ) h^{(1)} h(1) 的 likelihood 达到最大。那么如果不加层的话,普通的 RBM 中公式(11) 中的所有项都是确定的,而加了层之后,P(h ( 1 ) ^{(1)} (1) ) 不是确定的,而且可以被进一步优化。这样一波操作,就相当于变相的提高了 log P ( v ) P(v) P(v) 的 ELBO,而下界增大以后,就等价于可以将 P ( v ) P(v) P(v) 的很据的 更高,所以加层以后,模型的性能会更好。 加层以后, w ( 2 ) w^{(2)} w(2) 是需要赋予初始值的,那么令 w ( 2 ) = w ( 1 ) T w^{(2)}=w^{(1)^{T}} w(2)=w(1)T 。这样做的意义在于,第二层还没有学 习之前性能就已经达到了不加层时的效果了。那么,可以保证加层之后的模型的性能是有下界的,大于等于原始的 RBM。随着学习的进行,会提高 ELBO 从而获得比 RBM 更好的 P( v v v ),模型可以得到 更高的 P ( v ) P(v) P(v) 就意味着越接近真实分布,性能越好。 在 RBM 中 P ( h ( 1 ) ) P\left(h^{(1)}\right) P(h(1)) 的参数是由 w ( 1 ) w^{(1)} w(1) 决定的,加层以后 P ( h ( 1 ) ) P\left(h^{(1)}\right) P(h(1)) 的参数发生了改变是由 w ( 2 ) w^{(2)} w(2) 决定的。
2.4 小结
本节主要讲述的是DBN 的思想来源,为什么DBN 会产生较好的效果。DBN 的主要思路就是通过单独优化先验来提升下界,从而使似然函数最大化,它分离了先验和似然的求解过程,使用两组不同的参数,分开优化,从而获得较好的效果。接下来,将描述其学习过程。
3 贪心逐层预训练
3.1 近似推断的基本思想
本节主要是以一个传统的RBM 的角度来看DBN 的Learning。在上一小节,已经较为详细的论述了,每加一层就会使得ELBO 增加一些。假如,先只引入一个隐藏层 h ( 1 ) h^{(1)} h(1),那么有:
log P ( v ) ≥ E L B O = ∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) [ log P ( v , h ( 1 ) ) − log Q ( h ( 1 ) ∣ v ) ] = ∑ h ( 1 ) Q ( h ( 1 ) ∣ v ) log P ( v , h ( 1 ) ) − H ( log Q ( h ( 1 ) ∣ v ) ) \begin{aligned} \log P(v) & \geq \mathrm{ELBO} \\ &=\sum_{h^{(1)}} Q\left(h^{(1)} | v\right)\left[\log P\left(v, h^{(1)}\right)-\log Q\left(h^{(1)} | v\right)\right] \\ &=\sum_{h^{(1)}} Q\left(h^{(1)} | v\right) \log P\left(v, h^{(1)}\right)-H\left(\log Q\left(h^{(1)} | v\right)\right) \end{aligned} logP(v)≥ELBO=h(1)∑Q(h(1)∣v)[logP(v,h(1))−logQ(h(1)∣v)]=h(1)∑Q(h(1)∣v)logP(v,h(1))−H(logQ(h(1)∣v))
而 log P ( v , h ( 1 ) ) = log P ( v ∣ h ( 1 ) ) + log P ( h ( 1 ) ) , \log P\left(v, h^{(1)}\right)=\log P\left(v | h^{(1)}\right)+\log P\left(h^{(1)}\right), logP(v,h(1))=logP(v∣h(1))+logP(h(1)), 通过将当层以下层的参数全部固定, 然后新建一个 R B M \mathrm{RBM} RBM来优化 P ( h ( 1 ) ) , P\left(h^{(1)}\right), P(h(1)), 从而达到优化 ELBO 的目的。
很多同学会好奇,这个 Q ( h ( 1 ) ∣ v ) Q\left(h^{(1)} | v\right) Q(h(1)∣v) 是什么?在前面的近似推断和 E M \mathrm{EM} EM 算法的部分,都做了详细的 描述。Q ( h ( 1 ) ∣ v ) \left(h^{(1)} | v\right) (h(1)∣v) 是用来近似真实后验 P ( h ( 1 ) ∣ v ) P\left(h^{(1)} | v\right) P(h(1)∣v) 的简单分布,当且仅当 Q ( h ( 1 ) ∣ v ) = P ( h ( 1 ) ∣ v ) Q\left(h^{(1)} | v\right)=P\left(h^{(1)} | v\right) Q(h(1)∣v)=P(h(1)∣v) 时等号 成立。但是为什么要近似推断呢?
虽然,在原始的 RBM 中,RBM 的后验是可以计算的。因为在 RBM 的无向图模型中,可观测变量都已知的情况下,不可观测变量之间都是相互独立的,所以,RBM 模型是可分解的,也意味着可降, 低复杂度,后验计算比较简单。
但是,在 DBM 中就不一样了,观察图 1 很容易得出, 当可观测变量 v v v 被观测时。根据 D-Separation 中的 Head to Head 原则可得 h ( 1 ) h^{(1)} h(1) 中的节点之间都是相互联系的,这个现象也被称作 Explain away 现 象。所以, P ( h ( 1 ) ∣ v ) P\left(h^{(1)} | v\right) P(h(1)∣v) 是不可分解的,而且如果层数比较多的话,还要考虑对 h ( 1 ) h^{(1)} h(1) 和 h ( 2 ) h^{(2)} h(2) 求边缘分布, 这个计算基本是 intractable。所以,精确推断是搞不定了,需要用 Q ( h ( 1 ) ∣ v ) Q\left(h^{(1)} | v\right) Q(h(1)∣v) 来近似 P ( h ( 1 ) ∣ v ) P\left(h^{(1)} | v\right) P(h(1)∣v)
3.2 训练方法
现在的问题是 Q ( h ( 1 ) ∣ v ) Q\left(h^{(1)} | v\right) Q(h(1)∣v) 指的是一个近似分布,但是这个分布怎么求呢?注意,我们采取的逐层训 练的方法,你可以理解是前馈神经网络一样,求对某层求解时,假设其他层的参数都是周定的,不予考虑,从下往上一层一层的训练。
求解的思路是这样的,假设 v v v 和 h ( 1 ) h^{(1)} h(1) 之间是无向图,那么这两层之间可以看成是一个 RBM,因 为是 RBM 就不存在不可分解的问题,后验计算比较方使,这时 Q ( h ( 1 ) ∣ v ) = P ( h ( 1 ) ∣ v ) , Q\left(h^{(1)} | v\right)=P\left(h^{(1)} | v\right), Q(h(1)∣v)=P(h(1)∣v), 可以得到:
Q ( h ( 1 ) ∣ v ) = ∏ i Q ( h i ( 1 ) ∣ v ) = ∏ i sigmoid ( w i , i ( 1 ) + b i ( 1 ) ) Q\left(h^{(1)} | v\right)=\prod_{i} Q\left(h_{i}^{(1)} | v\right)=\prod_{i} \operatorname{sigmoid}\left(w_{i, i}^{(1)}+b_{i}^{(1)}\right) Q(h(1)∣v)=i∏Q(hi(1)∣v)=i∏sigmoid(wi,i(1)+bi(1))
利用这个后验分布,可以采样得出 h ( 1 ) h^{(1)} h(1) 层的样本,然后利用同样的办法求得 h ( 2 ) h^{(2)} h(2) 层,这样一层一层的 往上计算。注意到,最上面一层是一个真实的 RBM 了,因为把无问图变成有问图的目的就是为了在 上面加一层,到了最上面一层了,不需要再往上加了,理所应当就保留了无向图结构。
3.3 模型的优缺点
实际上,真实的后验分布 P ( h ( 1 ) ∣ v ) P(h^{(1)}|v) P(h(1)∣v) 是计算不出来的,我们采用了假设的方法,从而近似的计算了一个分布 Q ( h ( 1 ) ∣ v ) Q(h^{(1)}|v) Q(h(1)∣v) 来代替后验分布 P ( h ( 1 ) ∣ v ) P(h^{(1)}|v) P(h(1)∣v)。但是,实际上这两个分布之间的差距还是没那么小。所以,DBN 一个硬伤就是它的ELBO 是比较松散的(loose),那么就收敛性就不太好,收敛速率也可能比较低。
模型的优点是,从上而下进行采样比较简单,在最顶层(假设为第 t t t 层)的RBM 的 w w w 和 b b b 都确定的情况下,通过Gibbs 采样可以得到 h ( t − 1 ) h^{(t−1)} h(t−1) 层的样本,然后下面的所有层都是有向图模型,有向图模型的采样就相对很简单了,一层一层按照拓扑关系才就可以了。
4 总结
不得不说,老师讲的越来与抽象了,特别是涉及到思维层面的东西不太好理解。但是,确实给我的机器学习的研究生涯带来了不少启发。本章主要是介绍深度置信网络(Deep Belief Network,DBN)。首先介绍的是什么是DBN,DBN 的特点和DBN 的Model Representation;然后介绍了传统的RBM模型的劣势,从而提出了在RBM 模型训练完毕以后,对先验进一步优化的思路来提高下界,所以需要设计一个RBM 来对先验进行优化,这样就得到了DBN 的雏形,同时也充分的表明了DBN 在RBM基础上改进的有效性。最后,介绍了DBN 的逐层固定的训练思路,并且讲述了由于概率图的不可分解性,导致后验计算的非常困难。所以用近似推断的方法来计算后验,但是由于近似分布和真实分布之间有一定的差距,导致算法的下界比较松散,收敛性能一般。但是算法的概率图基本由有向图模型构成,关系比较清晰,所以DBN 算法的采样非常简单。