pytorch 实现mobilenet代码详解,了解深度可分离卷积计算。
mobilenet是一种轻量级网络,主要是想用于实时检测,那么那么它的优点就是训练速度快。它的设计点主要是深度卷积和逐点卷积,外加对通道数和分辨率加以改变,大幅度减少参数量。
第一步,你想要了解 Depthwise Conv 这个计算,它的核心在与逐点卷积,在nn.Conv2d的参数中有groups这个参数,默认是groups=1,意识是分组计算,等于一是就是普通的卷积,当时设置为groups = input_channels,就是深度可分离卷积的depthwise conv,给大家看一下简单的计算了解下,输出的是torch.Size([16, 2, 3, 3]),它的含义是将卷积核分成二组,分别卷积,最后将结果cat。当groups=4,那就是深度可分离卷积。
m = nn.Conv2d(4,16,3,1,1,groups=2)
print(m.weight.size())
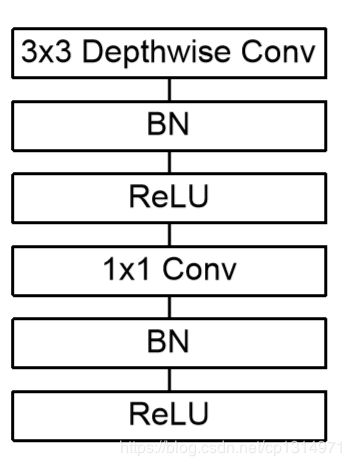
所以整个Depthwise Conv模块写成一个函数,对应上图的结构,这里的groups=in_channels就是深度可分离卷积了。
def _conv_dw(self, in_channels, out_channels, stride):
return nn.Sequential(
nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=stride, padding=1, groups=in_channels, bias=False),
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
)
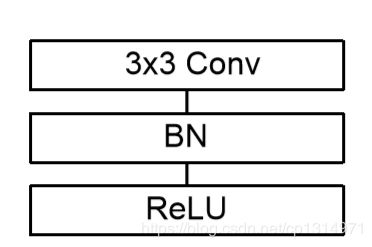
这个就是正常的普通卷积了,按图中的顺序写出来就行了。
def _conv_st(self, in_channels, out_channels, stride):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
)
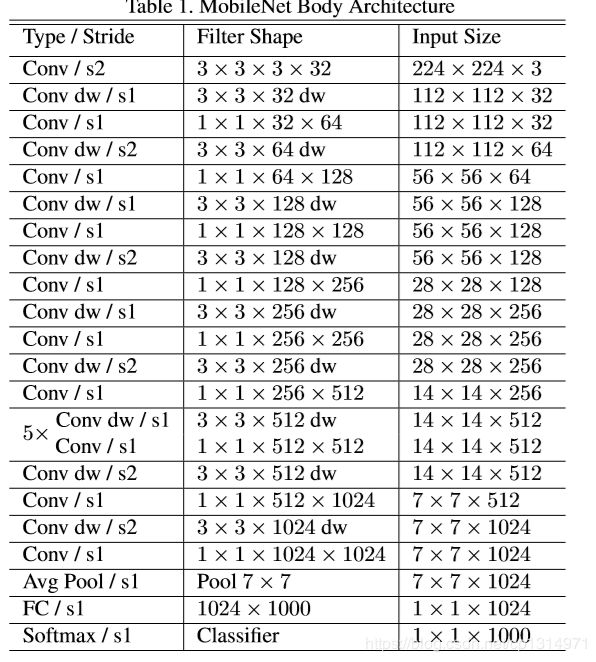
全部的结构按照图中对应的来设置卷积,中间有重复使用的层设置一个函数循环即可
def _conv_x5(self, in_channel, out_channel, blocks):
layers = []
for i in range(blocks):
layers.append(self._conv_dw(in_channel, out_channel, 1))
return nn.Sequential(*layers)

全部代码
import torch
import torch.nn as nn
class MobleNetV1(nn.Module):
def __init__(self, num_classes):
super(MobleNetV1, self).__init__()
self.conv1 = self._conv_st(3, 32, 2)
self.conv_dw1 = self._conv_dw(32, 64, 1)
self.conv_dw2 = self._conv_dw(64, 128, 2)
self.conv_dw3 = self._conv_dw(128, 128, 1)
self.conv_dw4 = self._conv_dw(128, 256, 2)
self.conv_dw5 = self._conv_dw(256, 256, 1)
self.conv_dw6 = self._conv_dw(256, 512, 2)
self.conv_dw_x5 = self._conv_x5(512, 512, 5)
self.conv_dw7 = self._conv_dw(512, 1024, 2)
self.conv_dw8 = self._conv_dw(1024, 1024, 1)
self.avgpool = nn.AvgPool2d(kernel_size=7, stride=1)
self.fc = nn.Linear(1024, num_classes)
def forward(self, x):
x = self.conv1(x)
x = self.conv_dw1(x)
x = self.conv_dw2(x)
x = self.conv_dw3(x)
x = self.conv_dw4(x)
x = self.conv_dw5(x)
x = self.conv_dw6(x)
x = self.conv_dw_x5(x)
x = self.conv_dw7(x)
x = self.conv_dw8(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
y = torch.softmax(x)
return x, y
def _conv_x5(self, in_channel, out_channel, blocks):
layers = []
for i in range(blocks):
layers.append(self._conv_dw(in_channel, out_channel, 1))
return nn.Sequential(*layers)
def _conv_st(self, in_channels, out_channels, stride):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
)
def _conv_dw(self, in_channels, out_channels, stride):
return nn.Sequential(
nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=stride, padding=1, groups=in_channels, bias=False),
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
)
net = MobleNetV1(1000)
x = torch.rand(1,3,224,224)
for name,layer in net.named_children():
if name != "fc":
x = layer(x)
print(name, 'output shape:', x.shape)
else:
x = x.view(x.size(0), -1)
x = layer(x)
print(name, 'output shape:', x.shape)