Autoware显示用户界面细节
<参考Autoware用户手册>
Runtime Manager
Runtime Manager是runtime_manager包中包含的Python脚本($HOME/Autoware/ros/src/util/packages/runtime_manager/scripts/runtime_manager_dalog.py)。可以通过以下命令启动:
$ rosrun runtime_manager runtime_manager_dialog.py
或
cd $HOME/Autoware/ros/
./run
Runtime Manager对话框由多个选项卡组成。操作Runtime Manager对话框支持启动/结束Autoware中使用的ROS节点的流程,以及发布已启动ROS参数的主题。启动/结束ROS节点的按钮被划功能,并放置在不同的选项卡中。可以通过按Runtime Manager对话框顶部的每个选项卡来切换每个选项卡窗口。
1. Runtime Manager - Quick Start选项卡
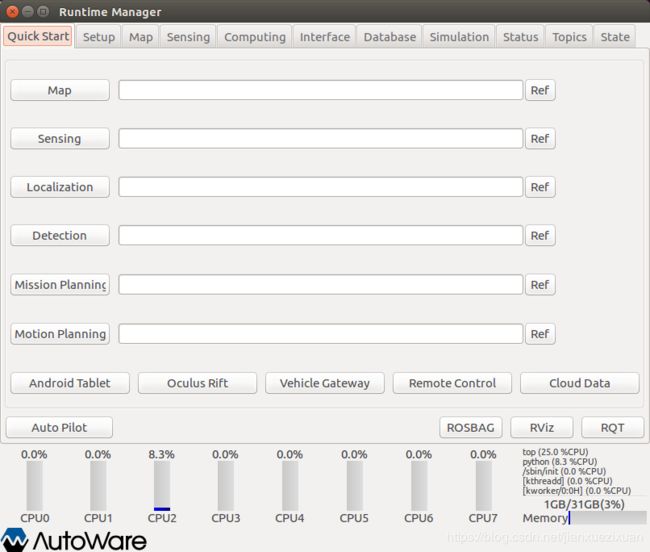
[Map] …[地图]:启动/结束由[Map]文本框中的完整路径指定的启动脚本。或者,可以通过按[Ref]按钮从显示的文件选择对话框中选择脚本。
[Sensing] …[传感]:启动/结束由[Sensing]文本框中的完整路径指定的启动脚本。或者,可以通过按[Ref]按钮从显示的文件选择对话框中选择脚本。
[Localization]…[定位]:启动/结束由[Localization]文本框中的完整路径指定的启动脚本。或者,可以通过按[Ref]按钮从显示的文件选择对话框中选择脚本。
[Detection] …[检测]:启动/结束由[Detection]文本框中的完整路径指定的启动脚本。或者,可以通过按[Ref]按钮从显示的文件选择对话框中选择脚本。
[Mission Planning] …[任务计划]:启动/结束由[Mission Planning]文本框中的完整路径指定的启动脚本。或者,可以通过按[Ref]按钮从显示的文件选择对话框中选择脚本。
[Motion Planning] …[运动规划]:启动/结束由[Motion Planning]文本框中的完整路径指定的启动脚本。或者,可以通过按[Ref]按钮从显示的文件选择对话框中选择脚本。
[Android Tablet] …[安卓平板电脑]:启动/结束脚本runtime_manager/tablet_socket.launch与平板电脑的通信。
[Oculus Rift] … <未实现的>
[Vehicle Gateway]…[汽车网关]:启动/结束脚本runtime_manager/vehicle_socket.launch与ZMP(日本机器人、自动驾驶公司) Robocar(改装的基于Autoware的自动驾驶丰田车)通信。
[Cloud Data]…[云数据]:开始/结束obj_db / obj_downloader节点。
[Auto Pilot] …[自动驾驶仪]:根据按钮的状态发布/mode_cmd主题。
[ROSBAG]…显示ROSBAG记录对话框的ROSBAG。
[RViz]…开始/结束RViz(ROS自带的一个图形化工具)。
[RQT]…开始/结束RQT(基于Qt的ROS GUI开发框架,以插件的形式实现各种GUI工具)。
2. Runtime Manager - Setup选项卡

[Baselink to Localizer]
[TF]……按[TF],车辆控制位置(base_link)→位置(Velodyne)的主题发布。
[x], [y], [z], [yaw], [pitch], [roll]…输入velodyne到base_link的相对位置。
[Vehicle Model]
[Vehicle Model]…启动/结束脚本model_publishe/vehicle_model.launch,带参数启动,参数是文本框中指定的URDF(统一机器人描述格式)文件(RViz上显示的车型)的完整路径。或者,可以从按[Ref]显示的文件选择对话框中选择URDF文件。如果在[Vehicle Model]文本框中没有指定URDF文件,则使用Autoware/ros/src/.config/Model /default.urdf。
3. Runtime Manager - Map选项卡
 [Point Cloud] …[点云]:使用参数启动/结束map_file/points_map_loader节点,参数是文本框中指定的3D map (PCD文件)的完整路径。或者,可以通过按[Ref]显示的文件选择对话框选择3D地图。
[Point Cloud] …[点云]:使用参数启动/结束map_file/points_map_loader节点,参数是文本框中指定的3D map (PCD文件)的完整路径。或者,可以通过按[Ref]显示的文件选择对话框选择3D地图。
[Auto Update] …[自动更新]:在启动map_file/points_map_loader时指定自动更新状态(启用或不启用)。可以通过在下拉框中选择一个项来指定自动更新的场景数量。只有在打开“自动更新”复选框时,此配置才有效。在“区域列表”文本框中指定区域列表文件的完整路径,该路径在启动map_file/point_map_loader时用作参数。或者,可以通过按[Ref]显示的文件选择对话框选择区域列表文件。
[Vector Map] …(矢量图):使用参数启动/结束map_file/vector_map_loader节点,参数是文本框中指定的Vector map (csv文件)的完整路径。或者,可以通过按Ref显示的文件选择对话框选择矢量图。
(TF)…启动/结束文本框中以完整路径指定的启动文件。如果没有指定启动文件,则启动文件~/.autoware/data/tf/tf。发射是开始/结束。或者,可以通过按Ref显示的文件选择对话框选择启动文件。
[地图工具]
[PCD Filter] …[PCD过滤器]:启动/结束带有参数的 map_tools/pcd_filter节点,参数是文本框中指定的3D映射(PCD文件)的完整路径。或者,可以通过按Ref显示的文件选择对话框选择3D地图。
(PCD Binarizer)…启动/结束带有参数的map_tools/pcd_binalizer节点,参数是文本框中指定的ASCII格式PCD文件的完整路径。或者,可以通过按[Ref]显示的文件选择对话框选择PCD文件。
4. Runtime Manager - Sensing选项卡

[Drivers]
-[CAN]
[can_converter]复选框…开始/结束kvaser / can_converter节点。
[can_draw]复选框…开始/结束kvaser / can_draw节点。
[can_listener]复选框…开始/结束kvaser / can_listener节点。
[can_listener] -[设置]…显示一个can_listener对话框。指定要在启动节点上选择的通道。
-[Cameras]
[PointGrey Grasshoper 3 (USB1)]复选框…开始/结束pointgrey / grasshopper3.launch脚本。
[PointGrey Grasshoper 3 (USB1)] - [config]…显示一个calibration_path_grasshopper3对话框。指定要在启动脚本时选择的校准文件路径。
[PointGrey Generic]复选框…开始/结束pointgrey_camera_driver /camera.launch脚本。
[PointGrey PointGray LadyBug 5]复选框…开始/结束pointgrey/ladybug.launch脚本。
[PointGrey PointGray LadyBug 5] -[config]…显示一个calibration_path_ladybug对话框。指定要在启动脚本时选择的校准文件路径。
[USB Generic]复选框…开始/结束runtime_manager / uvc_camera_node节点。
[IEEE1394]复选框…<未实现的>
[Baumer VLG-22]复选框…开始/结束vlg22c_cam /baumer.launch脚本。
-[GNSS]
[Javad Delta 3(TTY1)]复选框…开始/结束javad_navsat_driver / gnss.sh脚本。
[Javad Delta 3(TTY1)]-[config]…显示一个串行对话框。指定与RS232C相关的参数。
[Serial GNSS]复选框…开始/结束nmea_navsat / nmea_navsat.launch脚本。
[Serial GNSS]-[config] …显示一个串行对话框。指定与RS232C相关的参数。
-[IMU]
[Crossbow vg440] check box … <未实现的>
-[LIDARs]
[Velodyne HDL-64e-S2]复选框…开始/结束velodyne_pointcloud / velodyne_hdl64e_s2.launch启动脚本。
[Velodyne HDL-64e-S2]-[config] …显示一个校准路径对话框。在启动脚本时选择的校准文件路径。
[Velodyne HDL-64e-S3]复选框…开始/结束velodyne_pointcloud / velodyne_hdl64e_s3.launch脚本。
[Velodyne HDL-64e-S3]-[config] …显示一个校准路径对话框。指定要在启动脚本时选择的校准文件路径。
[Velodyne HDL-32e]复选框…开始/结束velodyne_pointcloud / velodyne_hdl32e.launch脚本。
[Velodyne HDL-32e]-[config] …显示一个校准路径对话框。指定一个
在启动脚本时选择的校准文件路径。
[Velodyne VLP-16]复选框…开始/结束velodyne_pointcloud / velodyne_vlp16.launch脚本。
[Velodyne VLP-16]-[config] …显示校准路径日志。指定要在启动脚本时选择的校准文件路径。
[Hokuyo TOP-URG]复选框…开始/结束hokuyo / top_urg.launch脚本。
[Hokuyo 3D-URG]复选框…开始/结束hokuyo / hokuyo_3d_urg.launch脚本。
[SICK LMS511]复选框…<未实现的>
[IBEO 8L Single]复选框…<未实现的>
-[Points Filter]
一章图像与待更新描述(tmp)
[Calibration Tool Kit] …开始/结束Calibration_camera_lidar / calibration_toolkit节点
[Calibration Publisher] …启动/结束runtime_manager/calibration_publisher.launch脚本。通过已启动的calibration_publiher对话框指定要在启动节点上选择的YAML文件的完整路径。
[Points Image] …开始/结束runtime_manager / points2image.launch脚本。
[Virtual Scan Image] …开始/结束runtime_manager / vscan.launch脚本。
[Scan Image] …开始/结束scan2image / scan2image节点
5. Runtime Manager - Computing选项卡
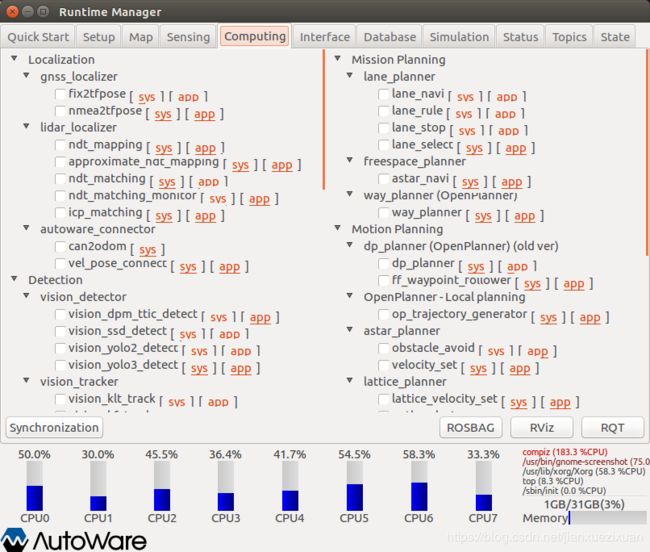
[Localication]
-[gnss_lozalizer]
[fix2tfpose]复选框…开始/结束gnss_localizer / fix2tfpose节点
[nmea2tfpose]复选框…开始/结束gnss_localizer / nmea2tfpose。启动脚本。
-[ndt_lozalizer]
[ndt_mapping]复选框…开始/结束ndt_localizer / ndt_mapping.launch脚本。点击[app],弹出ndt_mapping对话框。
[ndt_matching]复选框…开始/结束ndt_localizer / ndt_matching.launch脚本。点击[app],弹出ndt对话框。
-[vel_pose_mux]
[vel_pose_mux]复选框…开始/结束vel_pose_mux / vel_pose_mux.launch脚本。点击[app],弹出vel_pose_mux对话框。
[Detection]
-[cv_detector]
[dpm_ocv]复选框…开始/结束cv_tracker / dpm_ocv.launch脚本。显示一个dpm_ocv对话框。指定参数后,按[Detection Start]启动脚本。点击[app],弹出对话框。选择一个转弯参数类(车或行人),将显示car_dpm或pedestrian_dpm对话框。设置参数,发布/config/car_dpm或/config/pedestrian_dpm主题。
[dpm_ttic]复选框…开始/结束cv_tracker / dpm_ttic.launch脚本。显示dpm_ttic。指定参数后,按[Detection Start]启动脚本。点击[app],弹出对话框。
[rcnn_node]复选框…开始/结束cv_tracker / rcnn.launch脚本。点击[app],弹出对话框。
[range_fusion]复选框…开始/结束cv_tracker /ranging.launch脚本。在启动脚本时显示一个car_fusion对话框。点击[app],弹出对话框。
[klt_track]复选框…开始/结束cv_tracker / klt_tracking.launch脚本。点击[app],弹出对话框。
[kf_track]复选框…开始/结束cv_tracker / kf_tracking.launch脚本。启动脚本时会显示一个对话框。点击[app],弹出对话框。
[obj_reproj]复选框…开始/结束cv_tracker / reprojection.launch脚本。显示一个obj_reproj对话框。点击[app],弹出对话框。
-[lidar_detector]
[euclidean_cluster]复选框…开始/结束lidar_tracker / euclidean_clustering.launch脚本。单击[app],将显示一个对话框。
[obj_fusion]复选框…开始/结束lidar_tracker / obj_fusion.launch脚本。 启动脚本时会显示obj_fusion对话框。 单击[app],将显示一个对话框。
-[road_wizard]
[feat_proj]复选框…开始/结束road_wizard / feat_proj.launch脚本。 单击[app],将显示一个对话框。
[region_tlr]复选框…开始/结束road_wizard / traffic_light_recognition.launch脚本。 单击[app],将显示一个对话框。
-[viewers]
[image_viewer]复选框…开始/结束viewers / viewers.launch脚本。 image_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[image_d_viewer]复选框…开始/结束viewers / viewers.launch脚本。 image_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[points_image_viewer]复选框…开始/结束一个viewers / viewers.launch脚本。 points_image_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[points_image_d_viewer]复选框…开始/结束viewers / viewers.launch脚本。 points_image_d_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[vscan_image_viewer]复选框…开始/结束viewers / viewers.launch脚本。 vscan_image_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[vscan_image_d_viewer]复选框…开始/结束viewers / viewers.launch脚本。 vscan_image_d_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[traffic_light_viewer]复选框…开始/结束viewers / viewers.launch脚本。 traffic_light_viewer被指定为脚本参数viewer_type。单击[app],将显示一个对话框。
[Semantics]
[laserscan2costmap]复选框…开始/结束object_map / laserscan2costmap.launch脚本。 单击[app],将显示一个对话框。
[points2costmap]复选框…开始/结束object_map / points2costmap.launch脚本。 单击[app],将显示一个对话框。
[Mission Planning]
-[lane_planner]
[lane_navi]复选框…开始/结束lane_planner / lane_navi.launch脚本。 单击[app],将显示一个对话框。
[lane_rule]复选框…开始/结束lane_planner / lane_rule脚本。 单击[app],将显示一个对话框。
[lane_stop]复选框…开始/结束lane_planner / lane_stop脚本。 单击[app],将显示一个对话框。
[lane_select]复选框…开始/结束lane_planner / lane_script。 单击[app],将显示一个对话框。
-[freespace_planner]
[astar_navi]复选框…开始/结束freespace_planner / astar_navi脚本。 单击[app],将显示一个对话框。
[Motion Planning]
-[driving_planner]
[velocity_set]复选框…开始/结束driving_planner / velocity_set.launch脚本。 单击[app],将显示一个对话框。
[path_select]复选框…开始/结束driving_planner / path_select脚本。 单击[app],将显示一个对话框。
[lattice_trajectory_gen]复选框…开始/结束driving_planner / lattice_trajectory_gen.launch脚本。 单击[app],将显示一个对话框。
[lattice_twist_convert]复选框…开始/结束driving_planner / lattice_twist_convert节点。 单击[app],将显示一个对话框。
-[waypoint_marker]
[waypoint_loader]复选框…开始/结束waypoint_maker / waypoint_loader.launch脚本。 单击[app],将显示一个对话框。
[waypoint_saver]复选框…开始/结束waypoint_maker / waypoint_saver.launch脚本。 单击[app],将显示一个对话框。
[waypoint_clicker]复选框…开始/结束waypoint_maker / waypoint_clicker节点。 单击[app],将显示一个对话框。
-[waypoint_follower]
[pure_pursuit]复选框…开始/结束waypoint_follower / pure_pursuit.launch脚本。 单击[app],将显示一个对话框。
[twist_filter]复选框…开始/结束waypoint_follower / twist_filter.launch脚本。 单击[app],将显示一个对话框。
[wf_simulator]复选框…开始/结束waypoint_follower / wf_simulator.launch脚本。 单击[app],将显示一个对话框。
6. Runtime Manager - Interface选项卡

[Android Tablet] …开始/结束runtime_manager / tablet_socket.launch以与平板电脑进行通信。
[Oculus Rift] … <未实现>
[Vehicle Gateway] …开始/结束runtime_manager / vehicle_socket.launch以与ZMP Robocar通信。
[声音]复选框…开始/结束sound_player / sound_player.py。
[Auto Pilot] …根据按钮状态发布主题(/ mode_cmd)。
[Lamp] …根据按钮状态发布主题(/ lamp_cmd)。
[指示符] …根据按钮状态发布主题(/ indicator_cmd)。
[D]切换开关…发布按钮开启的主题(/ gear_cmd)。
[R]切换开关…发布按钮开启的主题(/ gear_cmd)。
[B]切换开关…发布按钮开启的主题(/ gear_cmd)。
[N]切换开关…发布按钮开启的主题(/ gear_cmd)。
[加速]滑块…发布滑块状态的主题(/ accel_cmd)。
[Brake]滑块…发布滑块状态的主题(/ brake_cmd)。
[Steer]滑块…发布滑块状态的主题(/ steer_cmd)。
[扭矩]滑块… <未实现>
[Veloc]滑块…发布滑块状态的主题(/ twist_cmd)。
[Angle]滑块…发布滑块状态的主题(/ twist_cmd)。
7. Runtime Manager - Database选项卡
 [CAN]
[CAN]
[can_uploder]复选框…开始/结束obj_db / can_uploader节点。 单击[app],将显示另一个对话框。
[Map]
[map_downloader]复选框…开始/结束map_file / map_downloader.launch脚本。 单击[app],将显示map_downloader对话框。
[Position]
[pos_downloader]复选框…开始/结束pos_db / pos_downloader节点。 单击[app],将显示pos_db对话框。
[pos_uploder]复选框…开始/结束pos_db / pos_uploader节点。 单击[app],将显示pos_db对话框。
[Sensors]
[image_upload]复选框… <未实现>
[pointcloud_uplod]复选框… <未实现>
[Query] … <未实现>
8. Runtime Manager - Simulation选项卡

*捕获和要更新的描述(tmp),/ use_sim_time
[ROSBAG]文本框…按[Play],在文本框中使用参数指定包文件的完整路径启动ROSBAG。 或者,可以通过按[Ref]显示的文件选择对话框指定包文件。
[Rate] …使用-r选项指定ROSBAG播放命令的数值。 如果未指定,则不使用-r选项。
[State Time(s)] …使用-start选项指定ROSBAG播放命令的数值。 如果未指定,则不使用-start选项。
[Repeat]复选框…如果为ON,则在启动ROSBAG播放命令时指定–loop选项。
[播放] …使用ROSBAG文本框中指定的包启动ROSBAG播放命令。
[停止] …结束正在运行的ROSBAG播放命令。
[暂停] …暂停正在运行的ROSBAG播放命令。
9. Runtime Manager - Status选项卡

顶部窗口…显示running top命令的执行结果。
左下窗口…显示相关节点发布的定期执行时间。
右下窗口…显示启动的节点,标准输出和标准错误脚本输出。 显示进度条的某些节点无法显示信息。
底部窗口…显示CPU(核心)负载和内存使用情况。
[系统监视器] …开始/结束gnome-system-monitor命令。
10. Runtime Manager - Topics选项卡

左窗口…显示主题列表。 启动rostopic info 命令,并通过单击链接在右下方窗口中显示该命令的结果。 如果Echo复选框为ON,则启动rostopic echo ,结果显示在右上方窗口中。
[Refresh] …通过运行rostopic list命令,使用获取的主题列表更新左窗口中显示的主题列表。