维特比算法(HMM预测问题)与Python实现
1 前言
这里介绍维特比算法,主要是其在解决HMM模型中预测问题中起到了很大得作用,之前也粗略介绍过维特比算法:维特比算法
但是不是很详细,这里再详细介绍一下。HMM预测问题也称为解码(decoding)问题。已知模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测序列 O = ( o 1 , o 2 , ⋯ , o T ) O=(o_1,o_2,\cdots,o_T) O=(o1,o2,⋯,oT),求给定的观测序列条件概率 P ( I ∣ O ) P(I|O) P(I∣O)最大的状态序列 I = ( i 1 , i 2 , ⋯ , i T ) I=(i_1,i_2,\cdots,i_T) I=(i1,i2,⋯,iT)。即给定观测序列,求最有可能的对应的状态序列。对于该问题,有两种算法:近似算法与维特比算法(Viterbi algorithm),我们主要是维特比算法。
维特比算法实际是用动态规划解隐马尔科夫模型预测问题,即用动态规划(dynamic programming)求概率最大路径(最优路径)。这时一条路径对应着一个状态序列。
2 维特比算法
输入:模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测序列 O = ( o 1 , o 2 , ⋯ , o T ) O=(o_1,o_2,\cdots,o_T) O=(o1,o2,⋯,oT);
输出:最优路径 I ∗ = ( i 1 ∗ , i 2 ∗ , ⋯ , i T ∗ ) I^*=(i_1^*,i_2^*,\cdots,i_T^*) I∗=(i1∗,i2∗,⋯,iT∗)。
(1) 初始化:
δ 1 ( i ) = π i b i ( o 1 ) , i = 1 , 2 , … , N \delta_1(i)=\pi_ib_i(o_1), i=1,2,\dots,N δ1(i)=πibi(o1),i=1,2,…,N
Ψ 1 ( i ) = 0 , i = 1 , 2 , ⋯ , N \Psi_1(i)=0,i=1,2,\cdots,N Ψ1(i)=0,i=1,2,⋯,N
(2)递推.对t=2,3,…,T
δ t ( i ) = m a x 1 ≤ j ≤ N [ δ i − 1 ( j ) a j i ] b i ( o i ) , i = 1 , 2 , … , N \delta_t(i)=\mathop{max}\limits_{1\le j \le N}[\delta_{i-1}(j)a_{j_i}]b_i(o_i),i=1,2,\dots,N δt(i)=1≤j≤Nmax[δi−1(j)aji]bi(oi),i=1,2,…,N
Ψ t ( i ) = a r g m a x 1 ≤ j ≤ N [ δ t − 1 a j i ] , i = 1 , 2 , … , N \Psi_t(i)=arg \mathop{max}\limits_{1\le j \le N}[\delta_{t-1}a_{ji}],i=1,2,\dots,N Ψt(i)=arg1≤j≤Nmax[δt−1aji],i=1,2,…,N
需要注意的是 Ψ t ( i ) \Psi_t(i) Ψt(i)面向得是t-1时刻得到当前得转移率,并没有与状态概率相乘。
(3) 终止
P ∗ = m a x 1 ≤ i ≤ N δ T ( i ) P^*=\mathop{max}\limits_{1\le i \le N}\delta_T(i) P∗=1≤i≤NmaxδT(i)
i T ∗ = a r g m a x 1 ≤ i ≤ N [ δ T ( i ) ] i_T^*=arg \mathop{max}\limits_{1 \le i \le N}[\delta_T(i)] iT∗=arg1≤i≤Nmax[δT(i)]
例:HMM模型 λ = ( A , B , π ) \lambda = (A,B,\pi) λ=(A,B,π),题目再述:有三个盒子,每个盒子中有红、白两种球,其中专业概率相关参数如下:。
A = [ 0.5 0.2 0.3 0.3 0.5 0.2 0.2 0.3 0.5 ] , B = [ 0.5 0.5 0.4 0.6 0.7 0.3 ] A=\begin{bmatrix} 0.5 & 0.2 & 0.3 \\ 0.3 & 0.5 & 0.2 \\ 0.2 & 0.3 & 0.5 \end{bmatrix}, B=\begin{bmatrix} 0.5 & 0.5 \\ 0.4 & 0.6 \\ 0.7 & 0.3 \end{bmatrix} A=⎣⎡0.50.30.20.20.50.30.30.20.5⎦⎤,B=⎣⎡0.50.40.70.50.60.3⎦⎤
已知观测序列 O = ( 红 , 白 , 红 ) O=(红,白,红) O=(红,白,红),试求最优状态序列,即最优路径 I ∗ = ( i 1 ∗ , i 2 ∗ , i 3 ∗ ) I^*=(i_1^*,i_2^*,i_3^*) I∗=(i1∗,i2∗,i3∗).
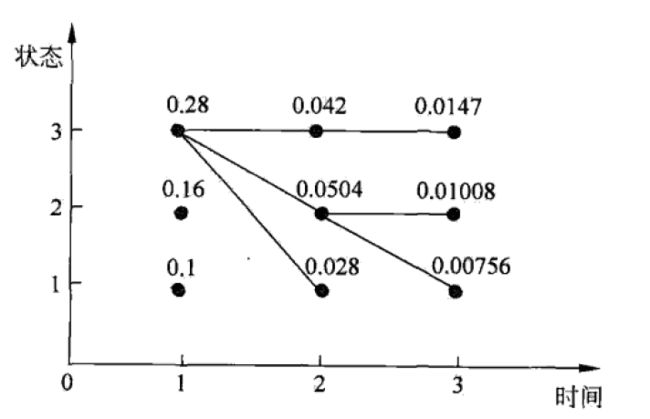
解:如下图所示,要在所有可能的路径中选择一条最优路径,求状态i观测 o 1 o_1 o1为红的概率,记此概率为 δ 1 ( i ) \delta_1(i) δ1(i),则
(1)初始化.在t=1时,对每一个状态i,i=1,2,3,求状态为i观测 o 1 o_1 o1为红球的概率,记此概率为 δ 1 ( i ) \delta_1(i) δ1(i),上例已知: π = ( 0.2 , 0.4 , 0.4 ) T \pi = {(0.2,0.4,0.4)^T} π=(0.2,0.4,0.4)T则:
δ 1 ( i ) = π i b i ( o 1 ) = π i ( 红 ) , i = 1 , 2 , 3 \delta_1(i)=\pi_ib_i(o_1)=\pi_i(红),i=1,2,3 δ1(i)=πibi(o1)=πi(红),i=1,2,3
带入实际数据:
δ 1 ( 1 ) = 0.2 × 0.5 = 0.10 , δ 1 ( 2 ) = 0.4 × 0.4 = 0.16 , δ 1 ( 3 ) = 0.4 × 0.7 = 0.28 \delta_1(1)=0.2\times0.5=0.10,\delta_1(2)=0.4\times 0.4=0.16,\delta_1(3)=0.4\times 0.7=0.28 δ1(1)=0.2×0.5=0.10,δ1(2)=0.4×0.4=0.16,δ1(3)=0.4×0.7=0.28
记 Ψ ( i ) = 0 , i = 1 , 2 , 3 \Psi(i)=0,i=1,2,3 Ψ(i)=0,i=1,2,3.
(2)在t=2时,对每个状态i, i=1,2,3,求在t=1时状态j观测为红并在t=2时状态为i观测 o 2 o_2 o2为白的路径的最大概率,记此最大概率为 δ 2 ( i ) \delta_2(i) δ2(i),则:
δ 2 ( i ) = m a x 1 ≤ j ≤ 3 [ δ 1 ( j ) a j i ] b i ( o 2 ) \delta_2(i)=\mathop{max} \limits_{1\le j \le3}[\delta_1(j)a_{ji}]b_i(o_2) δ2(i)=1≤j≤3max[δ1(j)aji]bi(o2)
同时,对每个状态i,i=1,2,3,记录概率最大路径的的前一个状态j:
Ψ 2 ( i ) = a r g m a x 1 ≤ j ≤ 3 [ δ 1 ( j ) a j i ] , i = 1 , 2 , 3 \Psi_2(i) = arg\mathop{max} \limits_{1\le j\le3}[\delta_1(j)a_{ji}],i=1,2,3 Ψ2(i)=arg1≤j≤3max[δ1(j)aji],i=1,2,3
计算有:
KaTeX parse error: No such environment: align* at position 8: \begin{̲a̲l̲i̲g̲n̲*̲}̲ \delta_2(1) &=…
需要注意的是:在t=2也有三个状态的可能性。其中 δ 2 ( 1 ) \delta_2(1) δ2(1)表示从t=1的各个可能的状态到t=2 状态为1观测为白的最大值。 Ψ 2 ( i ) = 3 , i = 1 , 2 , 3 \Psi_2(i)=3,i=1,2,3 Ψ2(i)=3,i=1,2,3是因为,当前路径中,上一个状态中状态3的概率最大,这里记住上一个状态,以便回溯。这里计算 Ψ 2 ( i ) \Psi_2(i) Ψ2(i)不是很清楚,以 Ψ 2 ( 1 ) \Psi_2(1) Ψ2(1)计算为例,如下:
KaTeX parse error: No such environment: align* at position 8: \begin{̲a̲l̲i̲g̲n̲*̲}̲ \Psi_2(1)&=arg…
可得当i=3时取最大,即有 Ψ 2 ( 1 ) = 3 \Psi_2(1)=3 Ψ2(1)=3
同样,在t=3时,
δ 3 ( i ) = m a x 1 ≤ j ≤ 3 [ δ 2 ( j ) a j i ] b i ( o 3 ) Ψ 3 ( i ) = a r g m a x 1 ≤ j ≤ 3 [ δ 2 ( j ) a j i ] δ 3 ( 1 ) = 0.00756 , Ψ 3 ( 1 ) = 2 δ 3 ( 2 ) = 0.01008 , Ψ 3 ( 2 ) = 2 δ 3 ( 3 ) = 0.0147 , Ψ 3 ( 3 ) = 3 \delta_3(i)=\mathop{max}\limits_{1\le j\le 3}[\delta_2(j)a_{ji}]b_i(o_3)\\ \Psi_3(i)=arg\mathop{max} \limits_{1 \le j\le 3 }[\delta_2(j)a_{ji}]\\ \delta_3(1)=0.00756,\Psi_3(1)=2\\ \delta_3(2)=0.01008,\Psi_3(2)=2\\ \delta_3(3)=0.0147,\Psi_3(3)=3 δ3(i)=1≤j≤3max[δ2(j)aji]bi(o3)Ψ3(i)=arg1≤j≤3max[δ2(j)aji]δ3(1)=0.00756,Ψ3(1)=2δ3(2)=0.01008,Ψ3(2)=2δ3(3)=0.0147,Ψ3(3)=3
(3)以 P ∗ P^* P∗表示最优路径的概率,则:
P ∗ = m a x 1 ≤ i ≤ 3 δ 3 ( i ) = 0.0147 P^*=\mathop{max}\limits_{1\le i \le 3}\delta_3(i)=0.0147 P∗=1≤i≤3maxδ3(i)=0.0147
最优路径的终点是 i 3 ∗ i_3^* i3∗: i 3 ∗ = a r g m a x i [ δ 3 ( i ) ] = 3 i_3^*=arg\mathop{max}\limits_{i}[\delta_3(i)]=3 i3∗=argimax[δ3(i)]=3
(4)由最优路径的终点 i 3 ∗ i_3^* i3∗,逆向查找 i 2 ∗ , i 1 ∗ i_2^*,i_1^* i2∗,i1∗:
在t=2时, i 2 ∗ = Ψ 3 ( i 3 ∗ ) = Ψ 3 ( 3 ) = 3 i_2^*=\Psi_3(i_3^*)=\Psi_3(3)=3 i2∗=Ψ3(i3∗)=Ψ3(3)=3
在t=1时, i 1 ∗ = Ψ 2 ( i 2 ∗ ) = Ψ 2 ( 3 ) = 3 i_1^*=\Psi_2(i_2^*)=\Psi_2(3)=3 i1∗=Ψ2(i2∗)=Ψ2(3)=3
于是求得最优路径,即最优状态序列 I ∗ = ( i 1 ∗ , i 2 ∗ , i 3 ∗ ) = ( 3 , 3 , 3 ) I^*=(i_1^*,i_2^*,i_3^*)=(3,3,3) I∗=(i1∗,i2∗,i3∗)=(3,3,3)
3 Python 实现
以下代码是个人根据李航老师那本书进行书写的,也难免有些bug,如果有的话,也希望各位友友提出,共同学学习和进步。
def viterbi(A, B, Pi, Obser, state):
"""
计算预测状态
:para:A 状态转移矩阵
:para:B 发射矩阵
:para:Pi 初始化矩阵
:para:Obser 观测序列
:parar:state 状态集合
:return: 返回两个值,第一个值是整个过程的维特比计算矩阵,第二个是预测序列的索引
"""
import numpy as np
row, col = len(Obser), len(state)
res = np.zeros((row, col)) # 竖向矩阵
res2 = np.zeros_like(res)
# print(res2)
# 转换为矩阵计算
A, B, Pi = np.array(A), np.array(B), np.array(Pi)
# 初始化
res[0, :] = B.T[0]*Pi
# 后续循环状态(2-t状态)
for i in range(1, row):
# 循环隐藏状态数,计算当前状态每个隐藏状态的概率
ob = Obser[i] # 当前观察值
tempres, tempres2 = [], []
for j in range(col):
# 以盒子1为例, 其他盒子转移到盒子
# print(A[:, j]) # 表示A中的第j列数据, 即其他盒子转移到盒子j的概率
# print(res[i - 1]) # res中第i-1行数的值 即delta(i-1)
# print(B[:, ob]) # 发射矩阵中的第ob列(由观测值确定)
# delta j的计算
delta = A[:, j]*res[i - 1]*B[j][ob]
# Psi # 获取最大值的索引
tempres2.append(np.argmax(A[:, j]*res[i - 1]))
tempres.append(np.max(delta))
res[i, :] = np.array(tempres) # 结果矩阵赋值
res2[i, :] = np.array(tempres2)
# 通过res和res2回溯
result = []
# 最后一行直接计算
result.append(np.argmax(res[row-1, :]))
i = row - 1
while i > 0:
result.append(res2[i][np.argmax(res[i, :])])
i -= 1
result.reverse() # 我们是逆向添加的
return res, result
if __name__ == "__main__":
# 隐藏状态, 为方便计算这里将隐层
invisiable = {0: '盒子1', 1: '盒子2', 2: '盒子3'}
invisiable_ls = [0, 1, 2]
# 初始状态 pi
pi = [0.2, 0.4, 0.4]
# 转移矩阵 A
trainsion_probility = [
[0.5, 0.2, 0.3],
[0.3, 0.5, 0.2],
[0.2, 0.3, 0.5]
]
# 发射矩阵B
emission_probility = [
[0.5, 0.5],
[0.4, 0.6],
[0.7, 0.3]
]
# 观测序列
obs_dic = {0: "红", 1: "白"}
# obs_seq = [0, 1, 0, 1, 0, 0, 0, 1, 1, 1]
obs_seq = [0, 1, 0]
print("观测序列为:")
for i in obs_seq:
print(obs_dic[i], end=" ")
print("")
# 结果
res, result = viterbi(trainsion_probility, emission_probility, pi, obs_seq, invisiable_ls)
print("res:\n", res)
print("预测序列为:")
for i in result:
print(invisiable[i], end=" ")
输出结果:
观测序列为:
红 白 红
res:
[[0.1 0.16 0.28 ]
[0.028 0.0504 0.042 ]
[0.00756 0.01008 0.0147 ]]
预测序列为:
盒子3 盒子3 盒子3
Reference
李航的《统计机器学习》
个人订阅号
更多算法知识等着你
