无线通信里的 UAV
无线通信里的 UAV
Wireless Communications with Unmanned Aerial Vehicles: Opportunities and Challenges
1. 什么是无人机?
由于其高移动性和低成本,无人机(unmanned aerial vehicles,UAVs),也通常被称为
- drones
- remotely piloted aircrafts
在过去几十年里得到了广泛的应用。
历史上,无人机主要用于军事,主要部署在敌方领土,以减少飞行员的损失。随着成本的不断降低和设备的小型化,小型无人机(通常重量不超过25kg)现在更容易被公众使用;因此,民用和商业领域出现了许多新的应用,典型的例子包括
- 天气监测
- 森林火灾探测
- 交通控制
- 货物运输
- 紧急搜救
- 通信中继
无人机大致可分为
- 固定翼 Fixed-Wing
- 旋翼 Rotary-Wing
两类,各有优缺点。例如:
-
固定翼无人机通常具有高速和可重载(high speed and heavy payload)等特点,但它们必须保持连续的向前运动才能保持在高空,因此不适合用例如近距离检查(close inspection)这样的固定位置类型应用(stationary applications)。
-
相比之下,旋翼无人机(如四轴飞行器 quadcopters)虽然移动性和有效载荷有限,但能够向任何方向移动,并在空中保持静止。因此,无人机的选择在很大程度上取决于应用类型。
2. UAV & Radio
UAV 实现高速无线通信将在未来的通信系统中发挥重要的作用。
事实上,UAV 辅助的无线通信提供了一种很有前途的解决方案,可以为没有基础设施覆盖的设备提供无线连接,例如,由于城市或山区地形的严重遮挡,或自然灾害造成的通信基础设施的破坏。
请注意,除了无人机之外,无线连接的另一种解决方案是通过高空平台(如气球balloons),这些平台通常在距地球表面数十公里(tens of kilometers)的平流层中运行。
与基于 UAV 的低空平台相比,基于高空平台的通信比其具有几个优势,例如更大的覆盖范围和更长的续航(endurance)。
因此,对于为非常大的地理区域提供可靠的无线覆盖来说,一般首选使用高空平台。另一方面,与基于高空平台的通信或基于地面或卫星系统(terrestrial or satellite systems)的通信相比,使用低空无人机(通常在不超过几公里的高度 not exceeding several kilometers)进行无线通信也有几个重要的优势:
- 首先,按需的无人机系统成本更低,部署更迅速,这使得它们特别适合于意外或有限时间的任务。
- 此外,在低空无人机的帮助下,短程 LoS 通信链路可以在大多数情况下建立,这可能导致在源和目标之间的 直接通信 或 在长距离 LoS 链路上的高空平台中继上 的显著性能改进。
- 无人机的可操控性(maneuverability)通过动态调整无人机状态以最佳适应通信环境,为性能提升提供了新的机会。此外,自适应通信(adaptive communications)可以与无人机移动控制(mobility control)相结合,进一步提高通信性能。
例如,当无人机体验到良好的地面终端信道时,除了可以以更高的速率发射外,还可以通过降低速度来保持良好的无线连接,从而向地面终端传输更多的数据。

无人机辅助无线通信的三个典型用例
- UAV-aided ubiquitous coverage
- UAV-aided relaying
- UAV-aided information dissemination and data collection
3. 哪些考虑
-
(保障无人机安全)首先,除了地面系统中的常规通信链路外,无人机系统还需要具有更严格延迟和安全要求的附加 control and non-payload communications(CNPC)链路,以支持安全关键功能如
- real-time contro
- collision
- rash avoidance
这需要更有效的资源管理和专为无人机通信系统设计的安全机制。
-
(无人机网络的可靠连接)此外,由于无人机系统的高移动性环境,通常会产生高度动态的网络拓扑结构,这些拓扑结构通常是稀疏且间断连接的。因此,有效的多无人机协调,或无人机群作业时,需要设计保证可靠的网络连接。同时,在设计新的通信协议时需要考虑到网络连接的稀疏性和间断性。
-
(无人机续航的衍生问题)另一个主要挑战来自无人机的(size, weight, and power) (SWAP) 约束,这可能限制它们的通信、计算和续航能力。为了解决这些问题,智能能源利用和补给(intelligent energy usage and replenishment)方案就需要开发一种能量感知(energy-aware)的 UAV 部署和操作机制。
-
(小区间干扰问题)最后,由于无人机的移动性,以及缺乏固定的回程链路和中心化控制,在启用了无人机的空中基站上,相邻小区之间的干扰协调比地面蜂窝系统更具挑战性。因此,有效的干扰管理技术是无人机辅助蜂窝网络中需要专门考虑的。
4. 系统模型
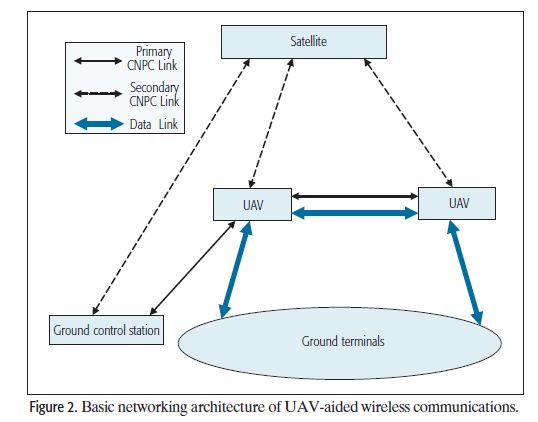
无人机无线通信的通用网络架构包括两种基本类型的通信链路
- CNPC 链路
- 数据链路
4.1 Control and Non-Payload Communications Link
CNPC links 对于确保所有无人机系统的安全运行至关重要。高可靠、低延迟和安全的双向通信(双向通信通常数据速率的要求较低)必须得到这些链路的支持,以便在无人机之间以及无人机和地面控制站(GCS)之间交换 safety-critical 的信息(GCS 例如是安装在地面车辆上的专用移动终端)。
主要的 CNPC 信息流可以大致分为三类:
- Command and control from GCS to UAVs
- Aircraft status report from UAVs to ground
- Sense-and-avoid information among UAVs
即使无人机是无人驾驶的,在没有实时人工控制的情况下,无人机可以仅依靠机载计算机完成任务。
如果需要紧急的人工干预,CNPC links 就是必要的。
我们没有考虑额外的 air traffic control (ATC) links,只有当无人机在管制空域(如机场附近)时才需要。
由于 CNPC 所支持的关键功能,该 links 一般应在受保护的频谱范围内运行。当前指定了两类频带:
- the L-band (960–977 MHz)
- the C-band (5030–5091 MHz)
此外,考虑延迟的因素,GCS 和无人机之间的直接链路总是首选(被称为 primary CNPC links),通过卫星的 secondary CNPC links 也可以作为备份(backup),以增强可靠性和鲁棒性。
CNPC links 的另一个关键要求是更高的安全性。特别是,应该使用有效的安全机制来避免所谓的幽灵控制(ghost control)场景,这是一种潜在的灾难性情况。在这种情况下,无人机是由未经授权的代理通过欺骗控制或导航信号控制的(controlled by unauthorized agents via spoofed control or navigation signals)。因此,CNPC links 应采用强大的认证技术,并可能辅以新兴的物理层安全技术。
4.2 Data Link
另一方面,数据链路的目的是针对地面终端提供任务相关的通信支持,根据应用场景的不同,地面终端可能包括
- 地面基站 (BS)
- 移动终端
- 网关节点
- 无线传感器等。
以 UAV-aided ubiquitous coverage为 例,无人机维护的数据链路需要支持以下通信模式:
- Direct mobile-UAV communication as for BS offloading or during complete BS malfunction
- UAV-BS and UAV-gateway wireless backhaul
- UAV-UAV wireless backhaul
这些数据链路的 capacity requirement 主要取决于应用类型,可能从 UAV-sensor links 的几 kbps 到 UAV-gateway wireless backhaul 的几十 Gbps 不等。与CNPC链路相比,数据链路通常在延迟和安全要求方面具有更高的容忍度(tolerance)。
在频谱方面,UAV 数据链路可以重复使用已分配给特定应用的现有频段,如,同时支持蜂窝网络覆盖的 LTE 频段,或者可以分配专用的新频段来提高性能,如,使用 mmWave、高容量 UAV-UAV 无线回程的波段。
5. 信道
CNPC & data links 都包括两类信道
- 无人机-地面 信道
- 无人机-无人机 信道
与广泛研究的地面通信信道相比,这两类信道具有一些独特的特性。
5.1 UAV-Ground Channel
虽然人们已经了解了用于航空应用的有人驾驶飞机的 air-ground channels,但 UAV-ground channels 的系统测量和建模工作仍是 ongoing。和有人驾驶的飞机系统不同,地面位置通常在开放区域有高高的天线塔,UAV-ground channels 由于更复杂的操作环境而更加复杂。
虽然在大多数情况下我们都希望会有 LoS 链路,但有时也会被地形、建筑物或机身本身(terrain, buildings, or the airframe)等障碍所阻挡。特别是,最近的测量表明,UAV-ground channels 可能遭受严重的 airframe shadowing,在飞机操纵(aircraft
maneuvering)期间长达数十秒,这需要考虑到关键任务操作(mission-critical operations)。
Probabilistic LoS model: LoS probability increases with elevation angle θ = h R \theta=\frac{h}{R} θ=Rh
P L O S = 1 1 + α exp ( − β [ θ − α ] ) P_{LOS} = \frac{ 1 }{ 1 + \alpha \exp\left( -\beta \left[ \theta - \alpha \right] \right) } PLOS=1+αexp(−β[θ−α])1
β \beta β and α \alpha α: S-curve parameters (constants) that depend on the environment (Accessing From The Sky: A Tutorial on UAV Communications for 5G and Beyond and Optimal LAP Altitude for Maximum Coverage)

Increasing LOS probability by increasing elevation angle or UAV’s altitude

- 对于低空(low-altitude)无人机,由于山脉、地面、树叶等的反射、散射和衍射,UAV-ground channels 也可能构成多个多径成分。
- 对于在沙漠或海洋(desert or sea)上运行的无人机,由于 LoS 和表面反射路径的优势,主要考虑 two-ray model。
- 另一种广泛使用的模型是随机的 Rician fading model,该模型由确定性的 LoS 分量和具有一定统计分布的随机散射分量组成。根据地面终端周围的环境和采用的频率,UAV-ground channels 可以采用广泛变化的莱斯因子(in hilly terrain 在山区):
- 15 dB for L-band
- 28 dB for C-band
5.2 UAV-UAV Channel
The UAV-UAV channels are mainly dominated by the LoS component.
尽管地面反射可能会导致非常少量的多径衰落,但与 UAV-ground / ground-ground 相比,其影响是最小的。
此外,UAV-UAV channel 可能比 UAV-ground counterparts 有更高的多普勒频率,由于 UAV 之间潜在的较大相对速度。这种信道特性直接影响 UAV-UAV 链路的频谱分配。一方面,LoS链路的优势可能意味着新兴的 mmWave 通信可以用于实现大容量 UAV-UAV 无线回程。另一方面,由于无人机之间的相对速度较高,加之 mmWave 频段的频率较高,会导致多普勒频移过大。

6. 我们可以做什么?
6.1 UAV 部署和路径规划
6.2 Energy-aware deployment and operation
6.3 MIMO for UAV

7. 利用无人机控制的移动性和通信的相互作用(Interplay)
7.1 UAV-enabled mobile relaying
7.2 D2D-enhanced UAV information dissemination
目标:deliver a bulky common file to a massive number of ground terminals scattered in a wide area(将大文件分发给分布在大面积区域内大量的终端设备)
方案:D2D enhanced information dissemination
-
Phase I: limited UAV multicasting while flying, each terminal is likely to receive a (different) portion of the file
-
Phase II: file sharing among ground terminals via D2D
-
Advantages: offload UAV, saves flying time and energy, enhanced performance
-
设计问题:D2D文件共享和无人机路径/速度优化