人工智能与机器学习——线性规划中的单纯形法、大M法的excel求解、python求解;非线性规划的拉格朗日乘子法求解、python求解
人工智能与机器学习——线性规划中的单纯形法、大M法的excel求解、python求解;非线性规划的拉格朗日乘子法求解、python求解
- 一、原理介绍
- 1. 单纯形法的原理
- 2. 大M法的原理
- 3. 拉格朗日乘子法的原理
- 二、线性规划中的单纯形法、大M法的excel求解
- 1. 线性规划求解题目
- 2. 单纯形法的excel求解
- 计算结果
- 3. 大M法的excel求解
- 三、单纯形法python编程
- 1. 建立线性回归分析标准化模型
- 2. 编写python代码
- 四、调用optimize包和scipy求解线性规划
- 1. 编写python代码
- 五、两种方法结果对比
- 1. 单纯形法
- 2. scipy库
- 六、拉格朗日乘子法求解
- 1. 线性规划题目
- 2. 手工数学推导
- 3. python求解
一、原理介绍
1. 单纯形法的原理
单纯形法就是秉承“保证每一次迭代比前一次更优”的基本思想:先找出一个基本可行解,对它进行鉴别,看是否是最优解;若不是,则按照一定法则转换到另一改进后更优的基本可行解,再鉴别;若仍不是,则再转换,按此重复进行。因基本可行解的个数有限,故经有限次转换必能得出问题的最优解。如果问题无最优解,也可用此法判别。
2. 大M法的原理
在线性规划问题的约束条件中加人工变量后,要求在目标函数中相应地添加认为的M或一M为系数的项。在极大化问题中,对人工变量赋于一M作为其系数;在极小化问题中,对人工变量赋于一个M作为其系数,M为一任意大(而非无穷大)的正数。把M看作一个代数符号参与运算,用单纯形法求解,故称此方法为大M法。
3. 拉格朗日乘子法的原理
基本的拉格朗日乘子法就是求函数f(x1,x2,…)在约束条件g(x1,x2,…)=0下的极值的方法。其主要思想是将约束条件函数与原函数联立,从而求出使原函数取得极值的各个变量的解。
二、线性规划中的单纯形法、大M法的excel求解
1. 线性规划求解题目
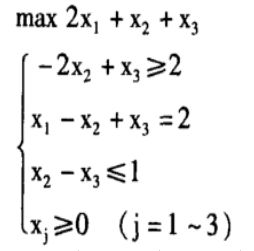
2. 单纯形法的excel求解
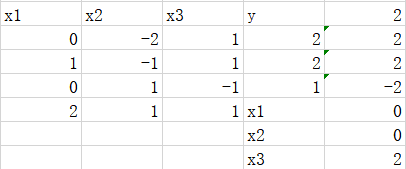
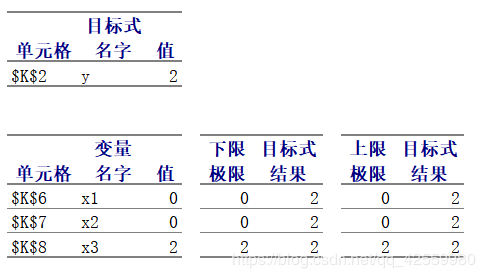
计算结果

3. 大M法的excel求解

三、单纯形法python编程
1. 建立线性回归分析标准化模型
创建txt文档如下:

2. 编写python代码
import numpy as np
def pivot(d,bn):
l = list(d[0][:-2])
jnum = l.index(max(l)) #转入编号
m = []
for i in range(bn):
if d[i][jnum] == 0:
m.append(0.)
else:
m.append(d[i][-1]/d[i][jnum])
inum = m.index(min([x for x in m[1:] if x!=0])) #转出下标
s[inum-1] = jnum
r = d[inum][jnum]
d[inum] /= r
for i in [x for x in range(bn) if x !=inum]:
r = d[i][jnum]
d[i] -= r * d[inum]
def solve(d,bn):
flag = True
while flag:
if max(list(d[0][:-1])) <= 0: #直至所有系数小于等于0
flag = False
else:
pivot(d,bn)
def printSol(d,cn):
for i in range(cn - 1):
if i in s:
print("x"+str(i)+"=%.2f" % d[s.index(i)+1][-1])
else:
print("x"+str(i)+"=0.00")
print("objective is %.2f"%(-d[0][-1]))
d = np.loadtxt("./data.txt", dtype=np.float)
(bn,cn) = d.shape
s = list(range(cn-bn,cn-1)) #基变量列表
solve(d,bn)
printSol(d,cn)
运行结果:

四、调用optimize包和scipy求解线性规划
1. 编写python代码
#导入包
from scipy import optimize
import numpy as np
#确定c,A_ub,B_ub
c = np.array([50,100])
A_ub = np.array([[1,1],[2,1],[0,1]])
B_ub = np.array([300,400,250])
#求解
res =optimize.linprog(-c,A_ub,B_ub)
print(res)
运行结果:
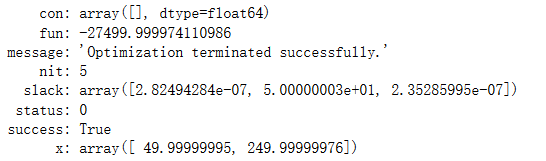
五、两种方法结果对比
1. 单纯形法

2. scipy库

六、拉格朗日乘子法求解
1. 线性规划题目

2. 手工数学推导

当 a = b = c = 1时
Vmax= 1.5396007
x = y = z = 0.5773503
3. python求解
from scipy.optimize import minimize
import numpy as np
e = 1e-10 # 非常接近0的值
fun = lambda x : 8 * (x[0] * x[1] * x[2]) # 约束函数f(x,y,z) =8 *x*y*z
cons = ({'type': 'eq', 'fun': lambda x: x[0]**2+ x[1]**2+ x[2]**2 - 1}, # x^2 + y^2 + z^2=1
{'type': 'ineq', 'fun': lambda x: x[0] - e}, # x>=e,即 x > 0
{'type': 'ineq', 'fun': lambda x: x[1] - e},
{'type': 'ineq', 'fun': lambda x: x[2] - e}
)
x0 = np.array((1.0, 1.0, 1.0)) # 设置初始值
res = minimize(fun, x0, method='SLSQP', constraints=cons)
print('最大值:',res.fun)
print('最优解:',res.x)
print('迭代终止是否成功:', res.success)
print('迭代终止原因:', res.message)
运行结果:
