【雕爷学编程】Arduino动手做(67)---BMP180气压传感器
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料+代码+图形+仿真)
实验六十七: GY-68 BMP180 新款 BOSCH温度模块气压传感器(替代BMP085)
BMP180
是博世Sensortec的新数字气压传感器,具有很高的性能,使应用先进的移动设备,如智能手机、平板电脑和体育设备。它遵循了BMP085带来了很多改进,像小尺寸和数字接口的扩张。超低功耗降至3μA使BMP180节电为您的移动设备的领导者。BMP180也是杰出的非常稳定的性能,最好有独立电源供电。BMP180是一款高精度、小体积、超低能耗的压力传感器,可以应用在移动设备中它的性能卓越,绝对精度最低可以达到0.03hPa,并且耗电极低,只有3μA。BMP180采用强大的8-pin陶瓷无引线芯片承载(LCC)超薄封装,可以通过I2C总线直接与各种微处理器相连。

BMP180主要特点
压力范围:3001100hPa(海拔9000米-500米)
电源电压:1.8V3.6V(VDDA),1.62V3.6V(VDDD) VIN需要5V
LCC8封装:无铅陶瓷载体封装(LCC)
低功耗:5μA,在标准模式
高精度:低功耗模式下,分辨率为0.06hPa(0.5米)
高线性模式下,分辨率为0.03hPa(0.25米)
含温度输出
I2C接口
温度补偿
无铅,符合RoHS规范
MSL 1反应时间:7.5ms
待机电流:0.1μA
无需外部时钟电路

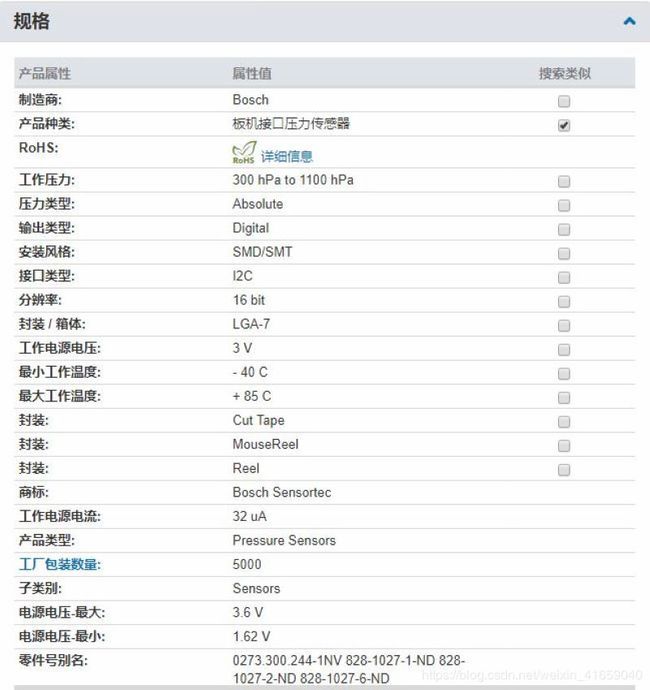
BMP180技术数据
压力范围300……1100 hPa
均方根噪声中表达压力0.06 hPa typ。(超低功耗模式)
0.02 hPa typ。(超高分辨率模式)
均方根噪声中表达高度0.5 m,typ。(超低功耗模式)
0.17米,typ。(超高分辨率模式)
相对精度的压力
VDD = 3.3 v 950……1050 hPa / hPa±0.12
@ 25°C / m±1.0
700年……900 hPa / hPa±0.12
25…40°C / m±1.0
绝对精度
p = 300…1100 hpa
(温度= 0…+ 65°C,VDD = 3.3。-4.0 V)压力:……+ 2.0 hPa
温度:±1°C,typ。
平均电流消耗(1 Hz刷新率数据)
峰值电流3μA典型(超低功耗模式)
32μA,典型的(高级模式)
650μA,典型的
待机电流1.62……3.6 V
电源电压vddio 1.62……3.6 V
电源电压vdd 1.8……3.6 V
操作温度。
范围全面准确”40…+ 85°C
0…+ 65°C
conv压力。5毫秒,典型的(标准模式)
I2C传输速率3.4 MHz,马克斯。
BMP180典型应用
GPS精准导航(航位推算,上下桥检测等)
室内室外导航
休闲、体育和医疗健康等监测
天气预报
垂直速度指示(上升/下沉速度)
风扇功率控制
体育设备,如高度剖面
BMP180气压模块是一款高精度、小体积、低能耗的压力传感器,可以应用在移动设备中,它的性能卓越,绝对精度最低可以达到0.03hPa,并且耗电极低,只有3μA。BMP180采用强大的8-pin陶瓷无引线芯片承载(LCC)超薄封装,可以通过I2C总线直接与各种微处理器相连。

特性曲线

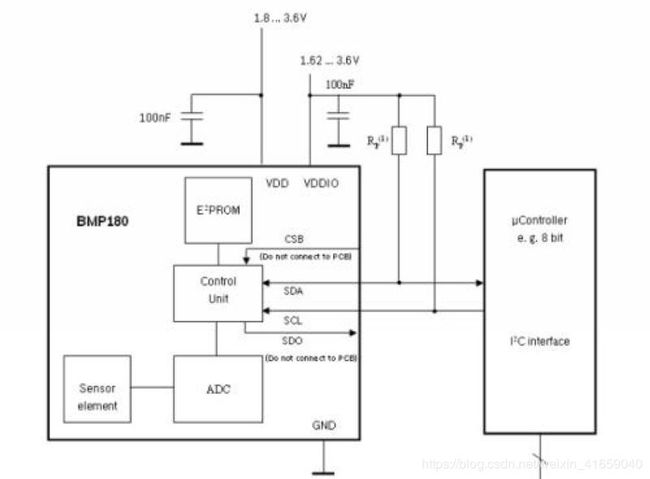
模块电原理图

需要用的 “SFE_BMP180” 库文件如下
SFE_BMP180.h
/*
【Arduino】66种传感器模块系列实验(68)
实验六十八:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)
SFE_BMP180.h
*/
#ifndef SFE_BMP180_h
#define SFE_BMP180_h
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
class SFE_BMP180
{
public:
SFE_BMP180();
char begin();
shorted?)
char startTemperature(void);
char getTemperature(double &T);
startTemperature command
char startPressure(char oversampling);
char getPressure(double &P, double &T);
startPressure command
double sealevel(double P, double A);
weather data)
double altitude(double P, double P0);
sea-level, runway, etc.)
char getError(void);
private:
char readInt(char address, int16_t &value);
char readUInt(char address, uint16_t &value);
char readBytes(unsigned char *values, char length);
char writeBytes(unsigned char *values, char length);
subsequent registers)
int16_t AC1,AC2,AC3,VB1,VB2,MB,MC,MD;
uint16_t AC4,AC5,AC6;
double c5,c6,mc,md,x0,x1,x2,y0,y1,y2,p0,p1,p2;
char _error;
};
#define BMP180_ADDR 0x77
#define BMP180_REG_CONTROL 0xF4
#define BMP180_REG_RESULT 0xF6
#define BMP180_COMMAND_TEMPERATURE 0x2E
#define BMP180_COMMAND_PRESSURE0 0x34
#define BMP180_COMMAND_PRESSURE1 0x74
#define BMP180_COMMAND_PRESSURE2 0xB4
#define BMP180_COMMAND_PRESSURE3 0xF4
SFE_BMP180.cp
/*
【Arduino】66种传感器模块系列实验(68)
实验六十八:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)
SFE_BMP180.cp
*/
#include 模块接线方式
1.先连接芯片与单片机(通过I2C接口),按照如下方式连接
5V—VIN
GND–GND
A5—SCL
A4—SDA
2.然后UNO通过usb与PC电脑连接
3.拷贝后面的代码烧录进Arduino

实验开源代码
/*
【Arduino】66种传感器模块系列实验(68)
实验六十八:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)
程序之一
*/
#include 
/*
【Arduino】168种传感器模块系列实验(67)
实验六十七:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)
程序之二,气温、气压与海拔值可以调整并校准
*/
#include 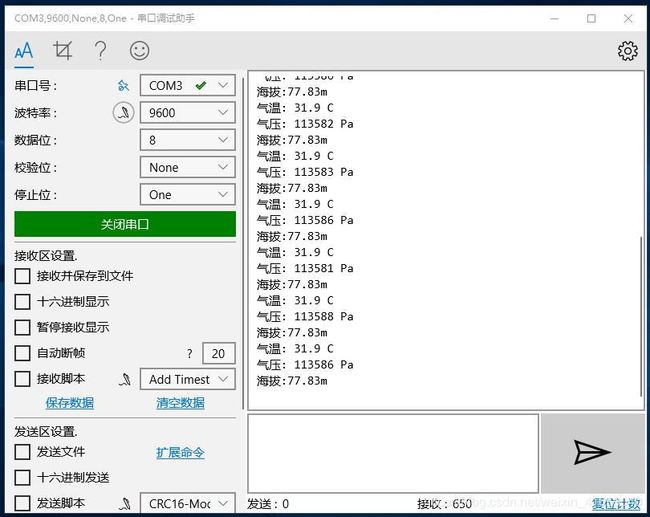
/*
【Arduino】168种传感器模块系列实验(67)
实验六十七:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)
程序之三,温度、实时气压、已知海拔计算的海平面的气压、已知海平面气压计算的高度
只是算法有点烂,做做实验而已
*/
#include 