Python-OpenCV:图像的全景拼接融合以及图片对齐处理
Opencv对图片切割和对图片对齐处理
以下原文转自:(作者: Wimb)
Python-OpenCV基础:图像的全景拼接
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
if __name__ == '__main__':
top, bot, left, right = 100, 100, 0, 500
img1 = cv.imread('2.png')
img2 = cv.imread('1.png')
srcImg = cv.copyMakeBorder(img1, top, bot, left, right, cv.BORDER_CONSTANT, value=(0, 0, 0))
testImg = cv.copyMakeBorder(img2, top, bot, left, right, cv.BORDER_CONSTANT, value=(0, 0, 0))
img1gray = cv.cvtColor(srcImg, cv.COLOR_BGR2GRAY)
img2gray = cv.cvtColor(testImg, cv.COLOR_BGR2GRAY)
sift = cv.xfeatures2d_SIFT().create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1gray, None)
kp2, des2 = sift.detectAndCompute(img2gray, None)
# FLANN parameters
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
# Need to draw only good matches, so create a mask
matchesMask = [[0, 0] for i in range(len(matches))]
good = []
pts1 = []
pts2 = []
# ratio test as per Lowe's paper
for i, (m, n) in enumerate(matches):
if m.distance < 0.7*n.distance:
good.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
matchesMask[i] = [1, 0]
draw_params = dict(matchColor=(0, 255, 0),
singlePointColor=(255, 0, 0),
matchesMask=matchesMask,
flags=0)
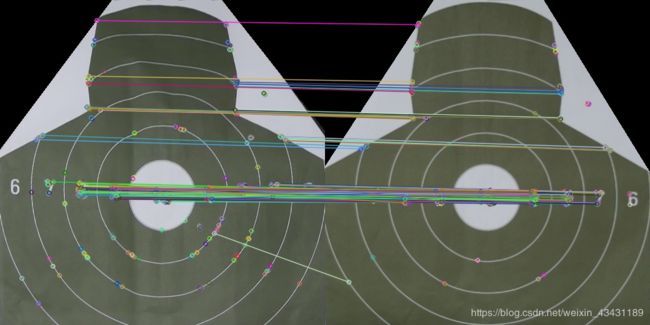
img3 = cv.drawMatchesKnn(img1gray, kp1, img2gray, kp2, matches, None, **draw_params)
plt.imshow(img3, ), plt.show()
rows, cols = srcImg.shape[:2]
MIN_MATCH_COUNT = 10
if len(good) > MIN_MATCH_COUNT:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
M, mask = cv.findHomography(src_pts, dst_pts, cv.RANSAC, 5.0)
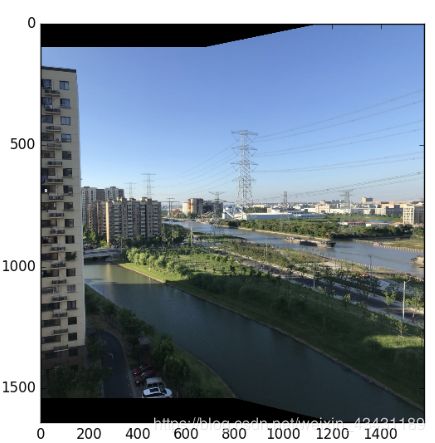
warpImg = cv.warpPerspective(testImg, np.array(M), (testImg.shape[1], testImg.shape[0]), flags=cv.WARP_INVERSE_MAP)
for col in range(0, cols):
if srcImg[:, col].any() and warpImg[:, col].any():
left = col
break
for col in range(cols-1, 0, -1):
if srcImg[:, col].any() and warpImg[:, col].any():
right = col
break
res = np.zeros([rows, cols, 3], np.uint8)
for row in range(0, rows):
for col in range(0, cols):
if not srcImg[row, col].any():
res[row, col] = warpImg[row, col]
elif not warpImg[row, col].any():
res[row, col] = srcImg[row, col]
else:
srcImgLen = float(abs(col - left))
testImgLen = float(abs(col - right))
alpha = srcImgLen / (srcImgLen + testImgLen)
res[row, col] = np.clip(srcImg[row, col] * (1-alpha) + warpImg[row, col] * alpha, 0, 255)
# opencv is bgr, matplotlib is rgb
res = cv.cvtColor(res, cv.COLOR_BGR2RGB)
# show the result
plt.figure()
plt.imshow(res)
plt.show()
else:
print("Not enough matches are found - {}/{}".format(len(good), MIN_MATCH_COUNT))
matchesMask = None

Opencv图片对齐(匹配)
#!usr/bin/python3
# -*-coding:utf-8-*-
from __future__ import print_function
import cv2
import numpy as np
# MAX_MATCHES = 500
MAX_MATCHES = 700
# MAX_MATCHES = 10000
# MAX_MATCHES = 15000
GOOD_MATCH_PERCENT = 0.25
def alignImages(im1, im2):
# Convert images to grayscale
im1Gray = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY)
im2Gray = cv2.cvtColor(im2, cv2.COLOR_BGR2GRAY)
# Detect ORB features and compute descriptors.
orb = cv2.ORB_create(MAX_MATCHES)
# orb = cv2.xfeatures2SURF_create()
# orb = cv2.xfeatures2d.SURF_create()
# orb = cv2.AKAZE_create(MAX_MATCHES)
# detector = cv2.AKAZE_create(MAX_MATCHES)
keypoints1, descriptors1 = orb.detectAndCompute(im1Gray, None)
keypoints2, descriptors2 = orb.detectAndCompute(im2Gray, None)
# Match features.
matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
matches = matcher.match(descriptors1, descriptors2, None)
print(matches)
# Sort matches by score
matches.sort(key=lambda x: x.distance, reverse=False)
# Remove not so good matches
numGoodMatches = int(len(matches) * GOOD_MATCH_PERCENT)
matches = matches[:numGoodMatches]
# Draw top matches
imMatches = cv2.drawMatches(im1, keypoints1, im2, keypoints2, matches, None)
cv2.imwrite("./image_align/matches.jpg", imMatches)
# Extract location of good matches
points1 = np.zeros((len(matches), 2), dtype=np.float32)
points2 = np.zeros((len(matches), 2), dtype=np.float32)
for i, match in enumerate(matches):
points1[i, :] = keypoints1[match.queryIdx].pt
points2[i, :] = keypoints2[match.trainIdx].pt
# Find homography
h, mask = cv2.findHomography(points1, points2, cv2.RANSAC)
# Use homography
height, width, channels = im2.shape
im1Reg = cv2.warpPerspective(im1, h, (width, height))
return im1Reg, h
if __name__ == '__main__':
# Read reference image
# refFilename = "../success_image/good_img.jpg"
# refFilename = "../staticimg/base.png"
refFilename = "../success_images/001_success.jpg"
# refFilename = "../staticimg/100_success.jpg"
print("Reading reference image : ", refFilename)
imReference = cv2.imread(refFilename, cv2.IMREAD_COLOR)
# Read image to be aligned
imFilename = "../staticimg/oldimg_04.jpg"
# imFilename = "../cut_labels/cut_image.jpg"
#
# def point2area(points, img, color):
# """
# :param points: 点集合
# :param img: 图片位置
# :param color: BGR三色
# :return:将图片上点包围的区域涂上颜色
# """
# img = cv2.imread(img)
# res = cv2.fillPoly(img, [np.array(points)], color)
# cv2.imshow('fillpoly', res)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
#
#
# if __name__ == '__main__':
# points = [(20, 20), (70, 70), (120, 200)]
# img = 'lena.png'
# color = [255, 255, 255]
# point2area(points, img, color)
# imFilename = "../staticimg/111.jpg"
# imFilename = "../staticimg/100_success.jpg"
print("Reading image to align : ", imFilename);
im = cv2.imread(imFilename, cv2.IMREAD_COLOR)
pointsone = [(350, 0), (512, 205), (512, 0)]
pointstwo = [(0, 0), (175, 0), (0, 234)]
# points = [(20, 20), (70, 70), (120, 200)]
color = [0, 0, 0]
res = cv2.fillPoly(im, [np.array(pointsone)], color)
res = cv2.fillPoly(im, [np.array(pointstwo)], color)
pointsthree = [(345, 0), (512, 270), (512, 0)]
pointsfour = [(0, 0), (170, 0), (0, 260)]
res = cv2.fillPoly(imReference, [np.array(pointsthree)], color)
res = cv2.fillPoly(imReference, [np.array(pointsfour)], color)
print("Aligning images ...")
# Registered image will be resotred in imReg.
# The estimated homography will be stored in h.
imReg, h = alignImages(im, imReference)
# Write aligned image to disk.
outFilename = "./image_align/aligned.jpg"
print("Saving aligned image : ", outFilename);
cv2.imwrite(outFilename, imReg)
# Print estimated homography
print("Estimated homography : \n", h)
matches.jpg