吴恩达Course 2 改善深层神经网络 笔记
本文主要参考红色石头Will大佬的完结篇 | 吴恩达deeplearning.ai专项课程精炼笔记全部汇总、何宽大大的【目录】【中文】【deplearning.ai】【吴恩达课后作业目录】,诸多语句和代码摘取其中原句。两位前辈将吴恩达的学习视频和课后编程作业解读得通俗透彻,适合如我这样的初学者,吹爆!
该笔记是吴恩达深度学习课程中Course 2 改善深层神经网络 的全部内容小结,综合了课后编程的部分代码实现和个人思绪归类。
文章目录
- 实用层面
- Train/Dev/Test sets
- 数据集分类
- 数据集比例
- 数据集注意
- Bias/Variance
- 偏差
- 方差
- Regularization
- L2正则化
- Dropout正则化
- 其他正则化方法
- Normalizing inputs
- Vanishing and Exploding gradients
- Gradient checking
- 一维线性
- 高维
- 梯度检查的注意事项
- 优化算法
- Mini-batch gradient descent
- Gradient descent with momentum
- 指数加权平均处理
- 动量梯度下降算法
- RMSprop
- Adam optimization algorithm
- Learning rate decay
- The problem of local optima
- 超参数调试、Batch正则化和编程框架
- Tuning Process
- 超参数
- 超参数调试
- 均匀采样
- 随机采样
- 尺度变化采样
- 训练模式
- Normalizing activations in a network
- Batch Normalization
- 训练过程中的实现
- 测试过程中的实现
- Training a softmax classifier
- 独热编码
- softmax分类器
- Deep learning frameworks
- Tensorflow
- tensorflow实现代码结构
实用层面
Train/Dev/Test sets
数据集分类
- 训练集Training sets用来训练你的算法模型
- 验证集Dev sets用来验证不同算法的表现情况,从中选择最好的算法模型
- 测试集Test sets用来测试最好算法的实际表现,作为该算法的无偏估计。
数据集比例
- 样本数量不大
- Train : Test = 7 : 3
- Train : Dev : Test = 3 : 1 : 1
- 样本数量大
- Train : Test = 99 : 1
- Train : Dev : Test = 98 : 1 : 1
根据实际样本数量考虑,样本数据量越大,对应的Dev/Test sets比例可以相较Train设置得越低。
数据集注意
- 尽量保证Dev sets和Test sets来自于同一分布
- 对Train sets做如翻转、随机噪声等处理,扩大训练样本数量。
- 不进行无偏估计也可以,即没有Test sets也没有问题。
Bias/Variance
解决高偏差和高方差的方法不同,分别通过训练集和验证集判断是否出现高偏差或高方差,再分别针对性解决。
偏差
偏差过高,即欠拟合。
减少偏差的方法:
- 增加神经网络的隐藏层个数、神经元个数
- 延长训练时间
- 选择其他的神经网络模型
方差
方差过高,即过拟合
减少方差的方法:
- 增加训练样本数据
- 进行正则化
- 选择其他的神经网络模型
Regularization
L2正则化
- L1正则化
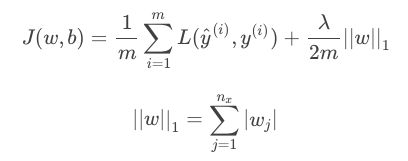
- L2正则化
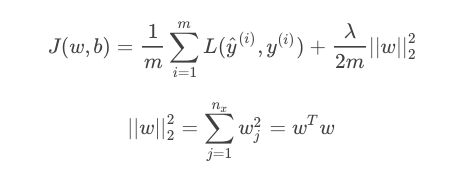
L1正则得到的w更加稀疏,能节约存储空间,但微分求导方面更复杂,所以一般用L2正则。
使用L2正则后,梯度下降算法中:
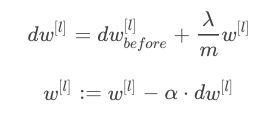
故L2正则也被称作权重衰减,w在迭代中相较于没有正则项的w不断减小。
Dropout正则化
在深度学习网络的训练过程中,对于每层的神经元,按照一定的概率将其暂时从网络中丢弃。
dl = np.random.rand(al.shape[0], al.shape[1]) < keep_prob # 生成dropout vector
al = np.multiply(al,dl) # 对l层进行dropout处理,随机删减神经元
al /= keep_prob # 对l层进行scale up处理,保持期望值不变
在用dropout训练结束后,在测试和实际应用中不需要进行dropout正则化。
其他正则化方法
- 数据扩张(data augmentation),对已有图片进行翻转、缩放或扩大、扭曲、增加噪音等等。
- 提前停止法(early stopping),在避免欠拟合后及时停止训练避免过拟合,但会影响损失函数的减小,不常用。
Normalizing inputs
标准化输入即对训练数据集进行归一化操作,将原始数据减去其均值后,再除以其方差,以此提高训练速度。

让所有输入归一化同样的尺度上,避免其中某些与其他输出差异大的输出发生振荡,方便进行梯度下降算法时能够更快更准确地找到全局最优解。
Vanishing and Exploding gradients
梯度消失和梯度爆炸,是指当训练一个层数非常多的神经网络时,计算得到的梯度可能非常小或非常大,甚至是指数级别的减小或增大,从而让训练过程变得非常困难。
本质原因是权重W随着层数的增加,出现指数型增大或减小,从而影响预测输出。
解决方法即初始化权重W,使得W与n有关,且n越大,W应该越小。
w[l] = np.random.randn(n[l], n[l-1]) * np.sqrt(1 / n[l - 1]) # 激活函数是tanh常用
w[l] = np.random.randn(n[l], n[l-1]) * np.sqrt(2 / n[l - 1]) # 激活函数是ReLU常用
Gradient checking
一维线性
根据求导的定义计算每个 θ \theta θ的近似梯度,利用欧式距离与反向传播得到的 θ \theta θ比较,检查是否一致。

def gradient_check(x,theta,epsilon=1e-7):
"""
实现图中的反向传播。
参数:
x - 一个实值输入
theta - 参数,也是一个实数
epsilon - 计算输入的微小偏移以计算近似梯度
返回:
近似梯度和后向传播梯度之间的差异
"""
#使用公式(3)的左侧计算gradapprox。
thetaplus = theta + epsilon # Step 1
thetaminus = theta - epsilon # Step 2
J_plus = forward_propagation(x, thetaplus) # Step 3
J_minus = forward_propagation(x, thetaminus) # Step 4
gradapprox = (J_plus - J_minus) / (2 * epsilon) # Step 5
#检查gradapprox是否足够接近backward_propagation()的输出
grad = backward_propagation(x, theta)
numerator = np.linalg.norm(grad - gradapprox) # Step 1'
denominator = np.linalg.norm(grad) + np.linalg.norm(gradapprox) # Step 2'
difference = numerator / denominator # Step 3'
if difference < 1e-7:
print("梯度检查:梯度正常!")
else:
print("梯度检查:梯度超出阈值!")
return difference
高维
For i in num_parameters:
-
计算
J_plus[i]:- 把 θ + \theta^{+} θ+ 设置为
np.copy(parameters_values) - 把 θ + \theta^{+} θ+ 设置为 θ + + ε \theta^{+}+\varepsilon θ++ε
- 使用
forward_propagation_n(x, y, vector_to_dictionary(θ+))来计算 J i + J_{i}^{+} Ji+
- 把 θ + \theta^{+} θ+ 设置为
-
计算
J_minus[i]: 使用相同的方法计算 θ − \theta^{-} θ− -
计算 g r a d a p p r o x [ i ] = J i + − J i − 2 ε gradapprox[i]=\frac{J_{i}^{+}-J_{i}^{-}}{2\varepsilon} gradapprox[i]=2εJi+−Ji−
-
计算梯度
-
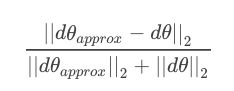
计算误差:
d i f f e r e n c e = ∥ g r a d − g r a d a p p r o x ∥ 2 ∥ g r a d ∥ 2 + ∥ g r a d a p p r o x ∥ 2 difference = \frac{\|grad-gradapprox\|_{2}}{\|grad\|_{2}+\|gradapprox\|_{2}} difference=∥grad∥2+∥gradapprox∥2∥grad−gradapprox∥2
def gradient_check_n(parameters,gradients,X,Y,epsilon=1e-7):
"""
检查backward_propagation_n是否正确计算forward_propagation_n输出的成本梯度
参数:
parameters - 包含参数“W1”,“b1”,“W2”,“b2”,“W3”,“b3”的python字典:
grad_output_propagation_n的输出包含与参数相关的成本梯度。
x - 输入数据点,维度为(输入节点数量,1)
y - 标签
epsilon - 计算输入的微小偏移以计算近似梯度
返回:
difference - 近似梯度和后向传播梯度之间的差异
"""
# 初始化参数
parameters_values , keys = dictionary_to_vector(parameters) # keys用不到
grad = gradients_to_vector(gradients)
num_parameters = parameters_values.shape[0]
J_plus = np.zeros((num_parameters,1))
J_minus = np.zeros((num_parameters,1))
gradapprox = np.zeros((num_parameters,1))
# 计算gradapprox
for i in range(num_parameters):
# 计算J_plus [i]。输入:“parameters_values,epsilon”
# 输出=“J_plus [i]”
thetaplus = np.copy(parameters_values) # Step 1
thetaplus[i][0] = thetaplus[i][0] + epsilon # Step 2
J_plus[i], cache = forward_propagation_n(X,Y,vector_to_dictionary(thetaplus)) # Step 3 ,cache用不到
# 计算J_minus [i]
# 输入:“parameters_values,epsilon”
# 输出=“J_minus [i]”。
thetaminus = np.copy(parameters_values) # Step 1
thetaminus[i][0] = thetaminus[i][0] - epsilon # Step 2
J_minus[i], cache = forward_propagation_n(X,Y,vector_to_dictionary(thetaminus)) # Step 3 ,cache用不到
# 计算gradapprox[i]
gradapprox[i] = (J_plus[i] - J_minus[i]) / (2 * epsilon)
# 通过计算差异比较gradapprox和后向传播梯度。
numerator = np.linalg.norm(grad - gradapprox) # Step 1'
denominator = np.linalg.norm(grad) + np.linalg.norm(gradapprox) # Step 2'
difference = numerator / denominator # Step 3'
if difference < 1e-7:
print("梯度检查:梯度正常!")
else:
print("梯度检查:梯度超出阈值!")
return difference
def dictionary_to_vector(parameters):
"""
Roll all our parameters dictionary into a single vector satisfying our specific required shape.
"""
keys = []
count = 0
for key in ["W1", "b1", "W2", "b2", "W3", "b3"]:
# flatten parameter
new_vector = np.reshape(parameters[key], (-1,1))
keys = keys + [key]*new_vector.shape[0]
if count == 0:
theta = new_vector
else:
theta = np.concatenate((theta, new_vector), axis=0)
count = count + 1
return theta, keys
def vector_to_dictionary(theta):
"""
Unroll all our parameters dictionary from a single vector satisfying our specific required shape.
"""
parameters = {}
parameters["W1"] = theta[:20].reshape((5,4))
parameters["b1"] = theta[20:25].reshape((5,1))
parameters["W2"] = theta[25:40].reshape((3,5))
parameters["b2"] = theta[40:43].reshape((3,1))
parameters["W3"] = theta[43:46].reshape((1,3))
parameters["b3"] = theta[46:47].reshape((1,1))
return parameters
def gradients_to_vector(gradients):
"""
Roll all our gradients dictionary into a single vector satisfying our specific required shape.
"""
count = 0
for key in ["dW1", "db1", "dW2", "db2", "dW3", "db3"]:
# flatten parameter
new_vector = np.reshape(gradients[key], (-1,1))
if count == 0:
theta = new_vector
else:
theta = np.concatenate((theta, new_vector), axis=0)
count = count + 1
return theta
梯度检查的注意事项
-
不要在整个训练过程中都进行梯度检查,仅仅作为debug使用。
-
注意不要忽略正则化项,计算近似梯度的时候要包括进去。
-
梯度检查时关闭dropout,检查完毕后再打开dropout。
-
随机初始化时运行梯度检查,经过一些训练后再进行梯度检查(不常用)。
优化算法
Mini-batch gradient descent
-
X(i) :第i个样本
-
Z[l]:神经网络第l层网络的线性输出
-
X{t}, Y{t}:第t组mini-batch
-
批量梯度下降算法(Batch gradient descent):对所有m个样本进行训练,一个epoch进行一次梯度下降算法。
-
小批量梯度下降算法(Mini-batch gradient descent):将m个样本分成T个子集,对每个mini-batch进行训练。一个epoch进行T次梯度下降算法。
-
随机梯度下降算法(Stochastic gradient descent):每个样本就是一个子集,对每个样本进行训练。一个epoch进行m次梯度下降算法。
- 当样本总数小于2000时,建议使用批量梯度下降,样本很大使用小批量梯度下降。
- mini-batch大小推荐设置为2的幂,如64,128,256,512等,能提高预算速度。
获得mini-batches的代码实现:
def random_mini_batches(X, Y, mini_batch_size = 64, seed = 0):
"""
从(X,Y)中创建一个随机的mini-batch列表
参数:
X - 输入数据,维度为(输入节点数量,样本的数量)
Y - 对应的是X的标签,【1 | 0】(蓝|红),维度为(1,样本的数量)
mini_batch_size - 每个mini-batch的样本数量
返回:
mini-bacthes - 一个同步列表,维度为(mini_batch_X,mini_batch_Y)
"""
np.random.seed(seed)
m = X.shape[1] # 训练集样本数量
mini_batches = []
# 第一步:打乱顺序
permutation = list(np.random.permutation(m)) # 返回一个长度为m的随机数组,且里面的数是0到m-1
shuffled_X = X[:, permutation] #将每一列的数据按permutation的顺序来重新排列。
shuffled_Y = Y[:, permutation].reshape((Y.shape[0],m))
# 第二步:分割
num_complete_minibatches = math.floor(m/mini_batch_size) # Math.floor() 返回小于或等于一个给定数字的最大整数。
for k in range(0, num_complete_minibatches):
mini_batch_X = shuffled_X[:, k * mini_batch_size : k * mini_batch_size + mini_batch_size]
mini_batch_Y = shuffled_Y[:, k * mini_batch_size : k * mini_batch_size + mini_batch_size]
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
# 如果训练集的大小刚好是mini_batch_size的整数倍,那么已处理完
# 如果训练集的大小不是mini_batch_size的整数倍,那么处理后续
if m % mini_batch_size != 0:
mini_batch_X = shuffled_X[:, num_complete_minibatches * mini_batch_size : m]
mini_batch_Y = shuffled_Y[:, num_complete_minibatches * mini_batch_size : m]
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
return mini_batches
损失函数等于每个mini-batch的损失函数除以mini-batch size后的全部求和。
Gradient descent with momentum
指数加权平均处理
V t = β V t − 1 + ( 1 − β ) θ t V_{t}=\beta V_{t-1}+(1-\beta)\theta_{t} Vt=βVt−1+(1−β)θt
β {\beta} β决定了指数加权平均的天数,即 1 1 − β \frac{1}{1-\beta} 1−β1表示前 1 1 − β \frac{1}{1-\beta} 1−β1天进行指数加权平均。
β {\beta} β值越大,则指数加权平均的天数越多,受前几天的影响越小,平均后的趋势线就越平缓。
由于开始时 V 0 V_{0} V0=0,所以初始值会相对小一些,直到后面受前面的影响逐渐变小才趋于正常,解决这个问题需要进行偏移校正(bias correction):
V t 1 − β t \frac{V_{t}}{1-\beta^{t}} 1−βtVt
或者可以忽略初始迭代过程,无需偏移校正。
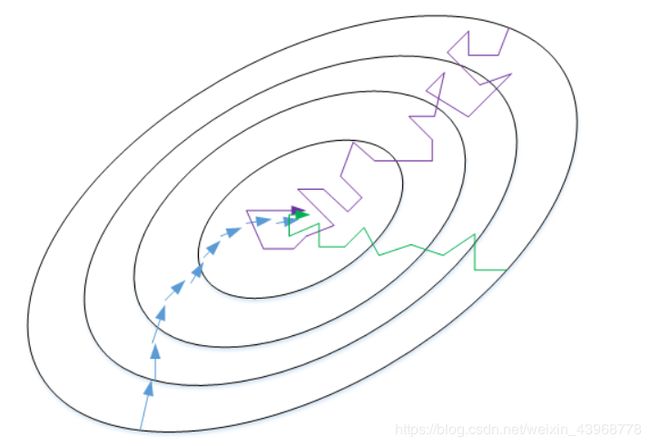
动量梯度下降算法
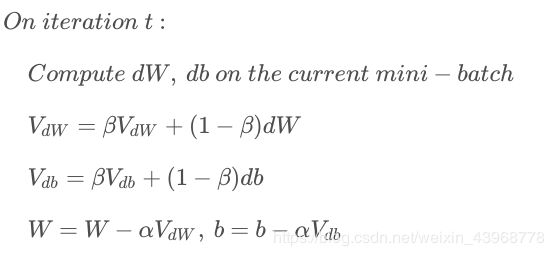
从动量的角度,以权重W为例, V d W V_{dW} VdW可以看成速度V,dW可以看成是加速度a。指数加权平均实际上是计算当前的速度,当前速度由之前的速度和现在的加速度共同影响。而β<1,又能限制速度 V d W V_{dW} VdW过大。也就是说,当前的速度是渐变的,而不是瞬变的,是动量的过程。这保证了梯度下降的平稳性和准确性,减少振荡,较快地达到最小值处。
def update_parameters_with_momentun(parameters,grads,v,beta,learning_rate):
"""
参数:
parameters - 一个包含参数值的变量
grads - 一个包含梯度值的字典变量
v - 包含当前速度的字典变量
beta - 超参数,动量,实数
learning_rate - 学习率,实数
返回:
parameters - 更新后的参数字典
v - 包含了更新后的速度变量
"""
L = len(parameters) // 2
for l in range(L):
# 计算速度
v["dW" + str(l + 1)] = beta * v["dW" + str(l + 1)] + (1 - beta) * grads["dW" + str(l + 1)]
v["db" + str(l + 1)] = beta * v["db" + str(l + 1)] + (1 - beta) * grads["db" + str(l + 1)]
# 更新参数
parameters["W" + str(l + 1)] = parameters["W" + str(l + 1)] - learning_rate * v["dW" + str(l + 1)]
parameters["b" + str(l + 1)] = parameters["b" + str(l + 1)] - learning_rate * v["db" + str(l + 1)]
return parameters,v
RMSprop
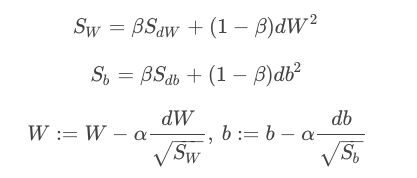
根据变化量dW和d计算 S w S_{w} Sw和 S b S_{b} Sb,来加快振荡小、变化慢的方向的速度,减慢振荡大、变化快的方向的速度,从而达到哪个方向大,就减小该方向的更新速度,从而减小振荡。
为了避免RMSprop算法中分母为零,通常在分母增加一个极小的常数 ε \varepsilon ε:

其中, ε = 1 0 − 8 \varepsilon=10^{-8} ε=10−8,或者其它较小值。
Adam optimization algorithm
Adam(Adaptive Moment Estimation)算法结合了动量梯度下降算法和RMSprop算法。
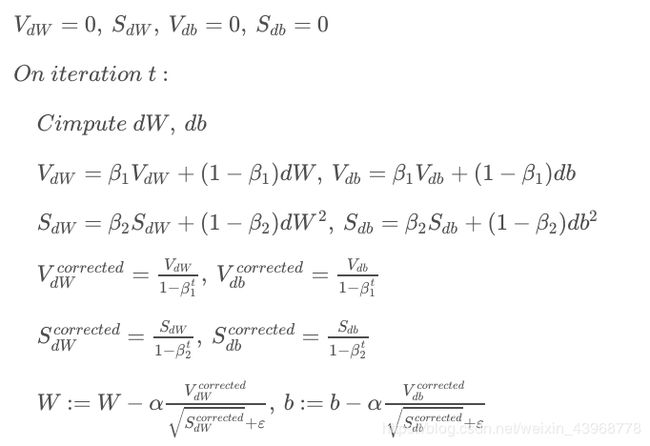
Adam算法包含了几个超参数,分别是: α \alpha α, β 1 \beta_{1} β1, β 2 \beta_{2} β2, ε \varepsilon ε。其中, β 1 \beta_{1} β1通常设置为0.9, β 2 \beta_{2} β2通常设置为0.999, ε \varepsilon ε通常设置为 1 0 − 8 10^{-8} 10−8。一般只需要对 β 1 \beta_{1} β1, β 2 \beta_{2} β2进行调试。
def update_parameters_with_adam(parameters,grads,v,s,t,learning_rate=0.01,beta1=0.9,beta2=0.999,epsilon=1e-8):
"""
使用Adam更新参数
参数:
parameters - 包含了参数的字典
grads - 包含了梯度值的字典
v - Adam的变量,第一个梯度的移动平均值,是一个字典类型的变量
s - Adam的变量,平方梯度的移动平均值,是一个字典类型的变量
t - 当前迭代的次数
learning_rate - 学习率
beta1 - 动量,超参数,用于第一阶段,使得曲线的Y值不从0开始
beta2 - RMSprop的一个参数,超参数
epsilon - 防止除零操作(分母为0)
返回:
parameters - 更新后的参数
v - 第一个梯度的移动平均值,是一个字典类型的变量
s - 平方梯度的移动平均值,是一个字典类型的变量
"""
L = len(parameters) // 2
v_corrected = {} # 偏差修正后的值
s_corrected = {} # 偏差修正后的值
for l in range(L):
# 梯度的移动平均值,输入:"v , grads , beta1",输出:" v "
v["dW" + str(l + 1)] = beta1 * v["dW" + str(l + 1)] + (1 - beta1) * grads["dW" + str(l + 1)]
v["db" + str(l + 1)] = beta1 * v["db" + str(l + 1)] + (1 - beta1) * grads["db" + str(l + 1)]
# 计算第一阶段的偏差修正后的估计值,输入"v , beta1 , t" , 输出:"v_corrected"
v_corrected["dW" + str(l + 1)] = v["dW" + str(l + 1)] / (1 - np.power(beta1,t))
v_corrected["db" + str(l + 1)] = v["db" + str(l + 1)] / (1 - np.power(beta1,t))
#计算平方梯度的移动平均值,输入:"s, grads , beta2",输出:"s"
s["dW" + str(l + 1)] = beta2 * s["dW" + str(l + 1)] + (1 - beta2) * np.square(grads["dW" + str(l + 1)])
s["db" + str(l + 1)] = beta2 * s["db" + str(l + 1)] + (1 - beta2) * np.square(grads["db" + str(l + 1)])
#计算第二阶段的偏差修正后的估计值,输入:"s , beta2 , t",输出:"s_corrected"
s_corrected["dW" + str(l + 1)] = s["dW" + str(l + 1)] / (1 - np.power(beta2,t))
s_corrected["db" + str(l + 1)] = s["db" + str(l + 1)] / (1 - np.power(beta2,t))
#更新参数,输入: "parameters, learning_rate, v_corrected, s_corrected, epsilon". 输出: "parameters".
parameters["W" + str(l + 1)] = parameters["W" + str(l + 1)] - learning_rate * (v_corrected["dW" + str(l + 1)] / np.sqrt(s_corrected["dW" + str(l + 1)] + epsilon))
parameters["b" + str(l + 1)] = parameters["b" + str(l + 1)] - learning_rate * (v_corrected["db" + str(l + 1)] / np.sqrt(s_corrected["db" + str(l + 1)] + epsilon))
return (parameters, v, s)
Learning rate decay
通过不断减小学习因子,减小步进长度,来减小梯度振荡。
α = 1 1 + d e c a y R a t e ∗ m α 0 \alpha=\frac{1}{1+decayRate*m}\alpha_{0} α=1+decayRate∗m1α0
decayRate是可调的参数,m是当前样本的个数。
也有其它可供选用的计算公式。
The problem of local optima
鞍点是在某些方向上看是极小值,某些方向看是极大值的点,mini-batch可以很好避免鞍点。
停滞期是梯度接近于零的平缓区域。
- 只要选择合理的强大的神经网络,一般不太可能陷入局部最优解。
- 停滞期可能会使梯度下降变慢,降低学习速度。
超参数调试、Batch正则化和编程框架
Tuning Process
超参数
( 重要性从高到低,排名不绝对 )
- α \alpha α :学习因子
- β \beta β:动量梯度下降因子
- hidden units:各隐藏层神经元个数
- mini-batch size:批量训练样本包含的样本个数
- layers:神经网络层数
- learning rate decay:学习因子下降参数
- β 1 \beta_{1} β1, β 2 \beta_{2} β2,$\varepsilon $:Adam算法参数(一般设置为0.9,0.999, 10-8)
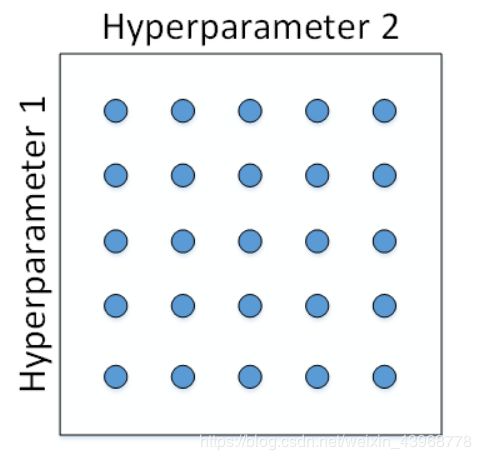
超参数调试
均匀采样
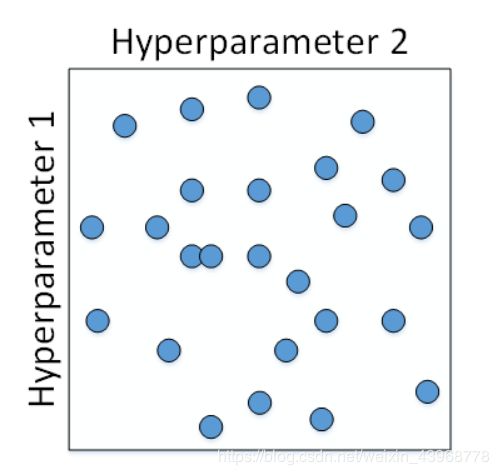
随机采样
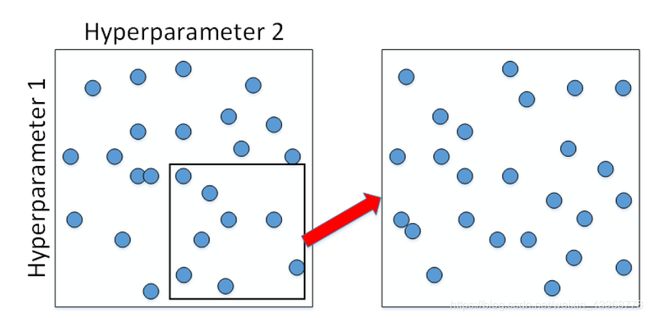
针对表现较好的区域模型,进行由粗到细的采样:
尺度变化采样
例如对于超参数 α \alpha α最佳的调整范围相较于其他超参数非常小,此时将linear scale转换成log scale:
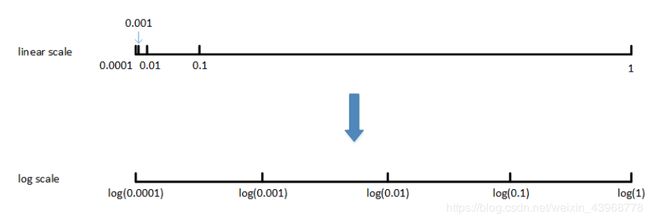
对应代码实现:
m = np.log10(a)
n = np.log10(b)
r = np.random.rand()
r = m + (n-m)*r
r = np.power(10,r)
如果例如动量梯度因子 β \beta β取值范围在[0.9,0.999]之间,只需对 1 − β 1-\beta 1−β在[0.001,0.1]区间进行log变换即可。
同时需要注意,对 β \beta β接近1的区间,应该采集得更密集一些,因为例如在[0.9000,0.9005]区间, 1 1 − β \frac{1}{1-\beta} 1−β1几乎没有变化。
训练模式
- Babysitting one model:一次只对一个模型进行训练,调试不同的超参数,寻找最佳表现。
- Training many models in parallel:对多个模型同事训练,每个模型上调试不同的超参数,选择最佳模型。
Normalizing activations in a network
Batch Normalization
训练过程中的实现
对训练数据集进行归一化操作,这种标准化输入只是对输入进行了处理,对于隐藏层的标准化处理就是Batch Normalization。
Batch Normalization能减小协变量移位的影响,后面层数的W对前面的W包容性更强,减少各层W和b的耦合性,模型更加健壮,鲁棒性更强。也能起到轻微的正则化效果。
一般对 Z [ l − 1 ] Z^{[l-1]} Z[l−1]进行处理,而不是 A [ l − 1 ] A_{[l-1]} A[l−1],其实差别不大。
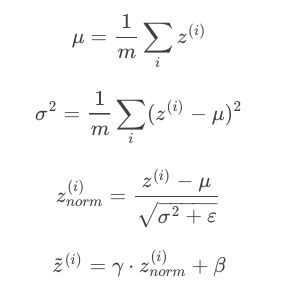
γ \gamma γ和 β \beta β是learnable parameters,可以通过梯度下降等算法求得,作用是让 z ˉ ( i ) \bar z^{(i)} zˉ(i)的均值和方差为任意值,避免所有的 z ˉ ( i ) \bar z^{(i)} zˉ(i)均值都为0,方差都为1。如果各隐藏层的输入均值在靠近0的区域即处于激活函数的线性区域,不利于训练好非线性神经网络。

因为Batch Norm对各隐藏层 Z [ l ] = W [ l ] A [ l − 1 ] + b [ l ] Z^{[l]}=W^{[l]}A^{[l−1]}+b^{[l]} Z[l]=W[l]A[l−1]+b[l]有去均值的操作,所以这里的常数项 b [ l ] b^{[l]} b[l]可以消去,其数值效果完全可以由 Z ˉ [ l ] \bar Z^{[l]} Zˉ[l]中的 β \beta β来实现。因此,我们在使用Batch Norm的时候,可以忽略各隐藏层的常数项 b [ l ] b^{[l]} b[l]。在使用梯度下降算法时,分别对 W [ l ] W^{[l]} W[l], β [ l ] \beta^{[l]} β[l]和 γ [ l ] \gamma^{[l]} γ[l]进行迭代更新。
测试过程中的实现
在测试过程中,如果只有一个样本,求其均值和方差没有意义,需要采用指数加权平均的方法对均值和方差进行估计:
对于第 l l l层隐藏层,考虑所有mini-batch在该隐藏层下的 μ [ l ] μ^{[l]} μ[l]和 σ 2 [ l ] σ^{2[l]} σ2[l],然后用指数加权平均的方式来预测得到当前单个样本的的 μ [ l ] μ^{[l]} μ[l]和 σ 2 [ l ] σ^{2[l]} σ2[l]。这样就实现了对测试过程单个样本的均值和方差估计。最后,再利用训练过程得到的 β [ l ] \beta^{[l]} β[l]和 γ [ l ] \gamma^{[l]} γ[l]值计算出各层的 z ˉ ( i ) \bar z^{(i)} zˉ(i)值。
Training a softmax classifier
独热编码
很多时候在深度学习中y向量的维度是从0到C−1,C是指分类的类别数量,如果C=4,那么需要使用独热编码(”one hot” encoding)转换y:
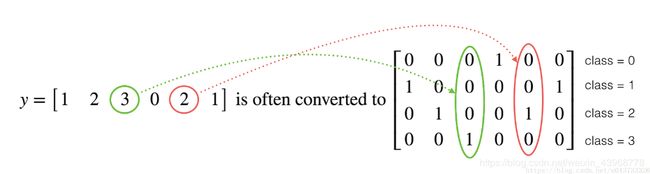
代码实现:
- 利用numpy快速实现
Y = np.eye(C)[Y.reshape(-1)].T
np.eye(C)是构造一个对角线为1的对角矩阵, Y.reshape(-1)把Y压缩成向量,np.eye(C)[Y.reshape(-1)]的意思是取对角矩阵的相应行, 最后.T做转置
- 或用其他深度学习框架的语句实现。
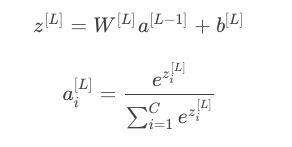
softmax分类器
例如对于C=4的多元分类问题,称为softmax回归模型。
其激活层的函数为:
其softmax分类器的损失函数为:
对于m个样本的代价函数为:
其反向传播过程中导数推导出来为:
Deep learning frameworks
Caffe/Caffe2,CNTK,DL4J,Keras,Lasagne,mxnet,PaddlePaddle,TensorFlow,Theano,Torch等都是深度学习的框架。
一般选择框架的准则:易于编程、速度快、完全开源。
Tensorflow
TensorFlow的最大优点就是采用数据流图(data flow graphs)来进行数值运算。图中的节点(Nodes)表示数学操作,图中的线(edges)则表示在节点间相互联系的多维数据数组,即张量(tensor)。而且它灵活的架构让你可以在多种平台上展开计算,例如台式计算机中的一个或多个CPU(或GPU),服务器,移动设备等等。
tensorflow实现代码结构
- 创建Tensorflow变量(此时,尚未直接计算)
- 实现Tensorflow变量之间的操作定义
- 初始化Tensorflow变量
- 创建Session
- 运行Session