论文《Poor textural image tie point matching via graph theory》学习
《基于图论的低纹理图像连接点匹配》2017
Abstract
特征匹配的目的是寻找相应的点作为图像之间的连接点。当输入图像具有低对比度或包含重复模式、遮挡或同质纹理时,鲁棒匹配仍然是一项具有挑战性的任务。本文提出了一种基于图论的特征匹配算法。该算法将几何约束和辐射约束结合到一个边缘加权(EW)亲和张量中。然后通过高阶图匹配得到连接点。测试了覆盖森林、沙漠、荒地和城市地区的四对低纹理图像。为了进行比较,还使用了三种最新的匹配技术,即尺度不变特征变换(SIFT)、加速鲁棒特征(SURF)和加速分段测试(FAST)。实验结果表明,在不同类型的不良纹理中,SIFT、SURF和FAST得到的匹配召回率在0~35%之间。然而,通过几何和辐射测量的结合以及电子战策略,该算法在四对图像中的召回率都优于50%。更好的匹配召回提高了正确匹配的数量、分散性和位置准确性。
1. Introduction
连接点匹配是计算机视觉、模式识别、摄影测量和遥感中的一项基本任务。本任务旨在寻找重叠区域的稀疏特征对应(Hartmann等人,2016)。当图像具有独特而丰富的纹理时,辐射信息足以匹配精细的连接点。然而,遥感图像的纹理通常很差。森林、荒地、沙漠和城市地区是容易产生不良纹理的环境的例子。森林图像在小尺度上具有重复模式,裸地图像具有同质纹理,沙漠图像具有少量纹理,城市图像具有遮挡和不连续性。从局部外观的角度来看,“差纹理”表示两个共轭区域之间的低对比度或非线性灰度变化。因此,在匹配低纹理图像时仅使用辐射信息是不够的,有时需要人工干预。这些干预措施将阻碍连接点匹配的自动化。
现有的匹配算法可以分为两类。第一类是基于辐射信息的算法,如归一化互相关(Gonzalez and Woods,1992)、SIFT(Lowe,2004)和基于特征阶的自相似(Sedaghat and Ebadi,2015)。当图像纹理精细且与众不同时,这些匹配算法是有效的(Krystian和Cordelia,2005)。第二类包括集成辐射和几何信息的匹配算法;这些算法包括半全局匹配(Heiko,2008)、基于补丁的多视图立体(Furukawa和Ponce,2007)和多照片几何约束匹配(Zhang和Armin,2006)。这些匹配算法利用预先确定的几何信息作为辅助匹配约束。这种集成方法的目的是在一定的约束条件下,首先将匹配问题分解成若干个子问题,然后通过迭代过程得到匹配结果,直到所有子问题收敛于同一解或相似解。
对于低纹理的图像关联点匹配,国内外研究较少。吴等人(2012)集成点和线特征,以获取基于多个视图的相机几何先验知识的三维密集点云。Zickler和Efros(2007)使用主成分分析SIFT(PCA-SIFT,Ke和Sukthankar,2004)对部分遮挡低对比度纹理中的目标进行检测,取得了满意的结果。低纹理图像匹配中另一个常用的算法是线特征匹配,例如线相交上下文特征(Kim and Lee,2010)、平均-标准偏差线描述符(Wang et al.,2009)、线段匹配(LSM,Bay et al.,2005)和具有同形约束的LSM(Sun et al.,2015)。这些算法在结构丰富的图像中检测线特征,然后用线描述符对线特征进行匹配。然而,在遥感图像中并不总是呈现直线特征。
差的纹理图像匹配在以下方面仍然是一个具有挑战性的任务。首先,纹理的均匀性通常表现为低的局部图像对比度;因此,基于辐射测量的匹配方法受到噪声的干扰。基于辐射测量的连接点匹配算法,如SIFT、SURF(Bay et al.,2006)和FAST(Mair et al.,2010),无论是从正确匹配的数量还是在位置精度方面,都无法提取理想的连接点。第二,纹理重复由规则的像素级递归表示,特征描述子不明显。因此,这些方法容易产生不正确的匹配。第三,纹理遮挡通常会导致阴影区域的局部几何变形和非线性密度变化。此外,两个共轭区域之间的辐射特征描述子距离不够近。纹理匹配不良的主要问题是正确匹配不足、不匹配和大量不正确匹配。
基于图的连接点匹配算法(Chung,1997)的主要思想是将图像特征作为图节点。然后将特征匹配问题转化为节点对应问题,通过图匹配解决(Livi和Rizzi,2013)。主要用于图形匹配的几何约束可以分为三类:酉约束(或点约束)、边约束(或对约束)和三元组约束(或三角形约束)。在这三种类型中,成对约束是最受关注的。这些约束编码图边中两个点集之间的关系。成对约束通常嵌入在图匹配算法中,例如谱图匹配(Leordeanu和Hebert,2005)、分级分配(Gold和Rangarajan,1996)、概率图匹配(Egozi等人,2013)和平衡图匹配(Schólkopf等人,2006)。三元组约束可以利用图的三角形信息。它们是局部仿射不变约束,而成对约束仅是距离不变约束。高阶图匹配(HOGM,Duchenne等人,2011)是一种典型的三重约束算法。当存在大量的异常点时,上述所有的图匹配算法都会产生很差的匹配结果。Cho等人。(2014)提出了一种最大池策略来处理异常值,但仅使用成对约束。Torresani等人。(2008)将图匹配算法应用于图像特征对应中;但是,由于仅使用成对约束,因此结果不是仿射不变的。因此,本文提出了一种基于高阶亲和张量的匹配算法,并将两个图之间的关系编码在张量中。与传统的辐射几何积分算法相比,该算法有三个显著的差异。(1) 几何信息在匹配中起着类似于辐射信息的作用,而不是作为辅助约束。(2) 匹配结果在几何和辐射测量上都是全局最优的。以SIFT匹配为例,最近邻距离比(NNDR)是一种有效的匹配方法,但它在辐射测量中仅是全局最优的。(3) 匹配算法采用边缘加权的亲和张量,使得匹配对异常点具有鲁棒性。
本文的其余部分安排如下。第二节主要介绍了图匹配的方法和提出的EW亲和张量。第三节给出了匹配方法的详细实现流程和实验结果。第四节得出本研究的结论。
2. Methodology
该部分提出了一种新的EW-HOGM方法来解决低纹理图像匹配问题。第2.1节介绍了HOGM的概念。第2.2节介绍了拟议的EW-HOGM。第2.3节描述了合成数据的实验结果。第2.4节对计算复杂性进行了理论分析。
2.1. HOGM
图像关联点匹配是指两组特征之间的对应关系,这个过程可以定义为一个图匹配问题。如图1所示,从源图像和目标图像中提取五对图像特征。图像特征可以看作是图形的节点,而位置、灰度等特征字符是节点的属性。两个特征之间的关系,如角度和距离,可以看作是图的边。两个图像特征集的匹配问题是两个图的节点匹配问题。因此,将连接点匹配问题转化为图匹配问题。
给出了两个图像特征集P和Q及其对应图GP和GQ。如果节点 V i ∈ G P V_i\in G_P Vi∈GP和 V i ′ 0 ∈ G Q V_{i'}0\in G_Q Vi′0∈GQ是赋值,那么 f i ∈ P 和 f i ′ ∈ Q f_i\in P和f_{i'}\in Q fi∈P和fi′∈Q是连接点,反之亦然。图匹配问题可以表述为

其中C是赋值集;nP和nQ是两个特征集的特征数; i 和 i ′ i和i' i和i′是节点 V i 和 V i ′ V_i和V_{i'} Vi和Vi′的标签,它们表示本文中的节点索引; c i i ′ c_{ii'} cii′是C的赋值元素,它表示 V i V_i Vi对应于 V i ′ V_{i'} Vi′。图节点的关系(即对应关系)也可以用分配矩阵来表示
![]()
其中 z i i ′ ∗ = 1 z^*_{ii'}=1 zii′∗=1表示Vi对应于Vi’, z i i ′ ∗ = 0 z^*_{ii'}=0 zii′∗=0表示Vi与GQ中的任何节点都不匹配。如图2所示,图匹配问题根据其约束形式可分为三类:一阶、二阶和高阶(三阶或更高)图匹配问题。
在一阶矩阵 A ∈ I R n P × n Q A\in IR^{n_P\times n_Q} A∈IRnP×nQ上建立了一阶图匹配问题


一阶图匹配问题为下列目标函数找到最优解:

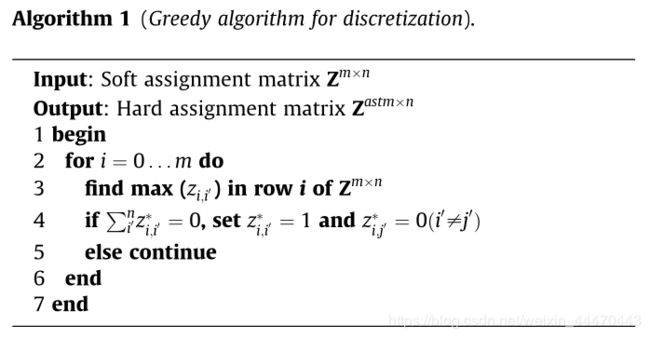
其中 a ∈ I R n P n Q a\in IR^{n_P n_Q} a∈IRnPnQ是矩阵A的行向量化,1表示所有元素为一的向量;Z是位于连续向量空间中的软赋值矩阵, Z ∗ ∈ { 0 , 1 } n P × n Q Z^*\in \{0,1\}^{n_P\times n_Q} Z∗∈{0,1}nP×nQ是硬赋值矩阵。因此,将Z离散为二元矩阵需要额外的过程,通常选择的离散方法是贪婪算法(见算法1,Leordeanu和Hebert,2005)。


在等式(3)中, Z 1 < = 1 ; Z T 1 < = 1 Z1<=1;Z^T1<=1 Z1<=1;ZT1<=1对匹配的对应关系施加限制。GP的每个节点在GQ中最多有一个对应的节点,GQ的每个节点在GP中最多有一个对应的节点。公式(3)可以使用匈牙利算法(Edmonds,1965)求解,也可以通过动态规划近似求解(Belongie等人,2002)。
一阶图匹配中使用的酉相似性仅对辐射变化(如SIFT和SURF等图像特征描述符)不变。
如图2所示,给出了两条边 E i j ∈ G p E_{ij}\in G_p Eij∈Gp和 E i ′ j ′ ∈ G Q E_{i'j'} \in G_Q Ei′j′∈GQ以及两个节点对 V i 、 V j ∈ E i j Vi、Vj\in E_{ij} Vi、Vj∈Eij和 V i ′ 、 V j ′ ∈ E i ′ j ′ Vi'、Vj'\in E_{i'j'} Vi′、Vj′∈Ei′j′。与点相似性度量类似,成对相似性度量可以用 Ω 2 = Ω 2 ( c i i ′ ; c j j ′ ) \Omega_2=\Omega_2(c_{ii'};c_{jj'}) Ω2=Ω2(cii′;cjj′)表示。在成对约束下定义的关联矩阵由

其中 w ∗ w^* w∗是矩阵A的主特征向量,最终的解可以使用算法1来实现。
值得注意的是,点约束与成对约束兼容。在式(4)中,如果i=j且i’=j’,则边缘相似性 Ω 2 ( c i i ′ ; c j j ′ ) \Omega_2(c_{ii'};c_{jj'}) Ω2(cii′;cjj′)等于 O m e g a 1 ( c i i ′ ) Omega_1(c_{ii'}) Omega1(cii′)。因此,在二阶图匹配中,点态相似度可以集成到边缘相似度中。边缘相似性除了对辐射变化具有不变性外,对旋转也具有不变性。
然而,一阶和二阶图匹配对尺度和小仿射变换都不具有不变性。因此,二阶图匹配应该扩展到高阶(三阶或更高阶)。为了简单起见,以三阶图匹配为例。类似于点相似性和对相似性,三重态(三角形)相似性可以定义为
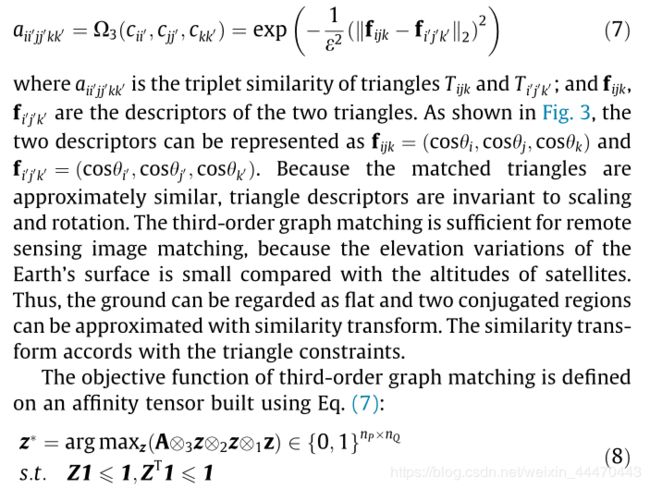


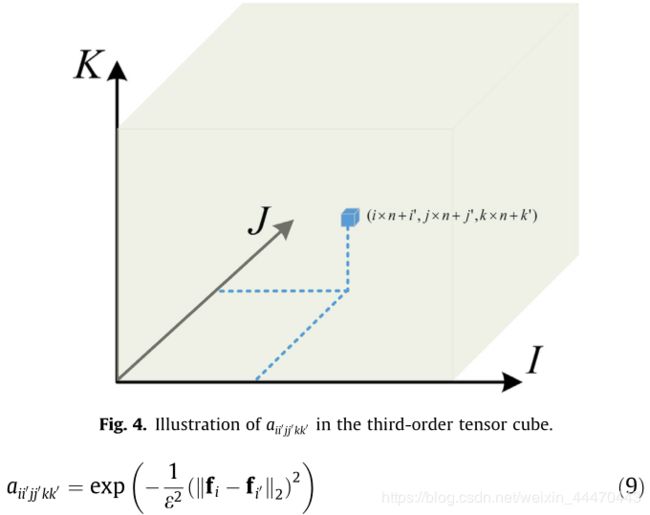
式(9)将辐射信息集成到三阶亲和张量中;因此,式(8)在几何和辐射测量方面是全局最优的。
然而,点态相似性与辐射特征描述符(例如128维SIFT描述符或36D SURF描述符)相关,而三重态相似性与几何信息(即3D三角形描述符)相关。因此,这两种相似性度量具有不同的物理维度,应标准化为统一的度量框架:

此外,规范化描述符比三角形描述符更具特色,因为它们具有更多的维度。因此,在描述词之间需要一个平衡因子,如下所示:

四。结论和今后的工作
图像匹配是遥感图像配准、空中三角测量和目标检测的基本步骤。虽然它在纹理丰富的图像中得到了很好的解决,但由于纹理的均匀性、重复性、遮挡性和不连续性,在匹配纹理较差的图像时仍然是一个挑战。传统的算法由于只使用辐射信息而容易失败。本研究提出一种新的匹配演算法,将几何与辐射资讯整合成亲和张量,并利用电子战策略来处理离群值。该方法包括四个步骤:特征检测、图形生成、张量构造和高阶图匹配。在特征检测中,采用了UR SIFT、SIFT和ANN,并将提取的图像特征作为图节点。然后,用表示节点和三角形相似性的元素构造亲和张量。将EW策略嵌入到幂迭代中,使匹配对异常点具有鲁棒性。利用四对不同纹理类型的遥感图像对该方法进行了评价:高层建筑、森林、沙漠和裸地。SIFT、SURF、FAST等基于特征的匹配算法的匹配召回率均低于35%,而ewogm的匹配召回率则高于50%。由于该算法具有较高的匹配召回率,因此在实验数据的正确匹配、离散度和位置精度方面都能获得可靠的匹配结果。
当考虑到EW-HOGM算法对孤立点的容忍度时,该算法也可用于形状匹配和三维云配准,其中孤立点的数量很大。此外,如果适当修改,ewogm也可以应用于粗差检测。但是,还有一些问题需要进一步解决。由于亲和张量的巨大增加了幂次迭代的运算量,EW-HOGM的计算复杂度较高。进一步的研究可以引入新的策略,使张量稀疏化,降低幂迭代的计算复杂度。此外,power迭代也可以在基于GPU的并行计算框架中实现(Silva等人,2016),这可以极大地加快power迭代的速度。