摘要 - 在传感器领域足够的网格覆盖的限制下,我们提出了一个资源有限的传感器资源管理优化框架。我们提供分布式传感器网络的独特“简约”视图,其中传感器传输/报告最小量的感测数据。所提出的理论旨在优化传感器的数量并确定它们的位置以支持这种简约传感器网络。我们将传感器区域表示为点的网格(二维或三维)。由于与传感器检测相关的不确定性,优化框架是固有的概率性。所提出的算法解决了不精确检测和地形属性约束下的覆盖优化。网格点的优先覆盖问题(基于安全性和战术重要性的相对措施)也被建模。具有障碍物的示例传感器场的实验结果表明我们的方法的应用。
1 Introduction
传感器布置直接影响资源管理以及必须用分布式传感器网络中感测数据执行的后端处理和开发的类型。 传感器资源管理中的一个关键挑战是确定优化成本的传感器现场架构,提供高传感器覆盖率,对传感器故障的恢复能力以及适当的计算/通信权衡。 智能传感器放置方便了传感器/开发系统的统一设计和操作,减少了对监控,目标位置和跟踪过度网络通信的需求。 传感器放置因此在前端感测和后端开发之间形成了必不可少的“胶”。
在这项工作中,我们提出了一个资源有限的传感器资源管理优化框架,在传感器领域足够覆盖网格的限制下。 所提出的研究提供了分布式传感器网络的独特的“简约”视图,其中部署了最少数量的传感器,并且它们传送/报告最小量的感测数据。 智能传感器放置确保该数据的集合包含足够的信息,用于数据处理中心随后查询少量传感器以获取详细信息,例如, 图像和时间序列数据。 所提出的理论旨在优化传感器的数量及其布置以支持这种简约传感器网络。
在典型的情况下,监督机构有几种不同类型的可用传感器,可以适当地放置在传感器领域。 这些传感器在其模态,监测范围,检测能力和成本方面彼此不同。 智能传感器部署策略对于降低成本和足够的传感器覆盖是必要的。 此外,传感器部署必须考虑到地形的性质(诸如红外传感器的视线中的建筑物和树木等障碍物,丘陵地形的不均匀表面和高度等),由于传感器故障的可能性造成的冗余 ,以及部署传感器之间以及部署传感器和集群头之间传输所需的电力。
我们将传感器区域表示为点的网格(二维或三维)。 因此,传感器领域中的一个目标是一个逻辑对象,它由一组看到它的传感器表示。 不规则的传感器场被建模为网格集合。 然而,由于与传感器检测有关的不确定性,优化框架本身就是概率性的。 所提出的用于传感器放置的算法解决诸如在不精确检测和地形属性的约束下的覆盖优化的问题。 网格点的优先覆盖问题(基于安全性和战术重要性的相对措施)也被建模。 我们将本文的讨论限于固定传感器。 具有障碍物的示例传感器场的实验结果表明我们的方法的应用。
以前的分布式传感器网络研究在很大程度上忽略了传感器放置问题 大多数以前的工作仅专注于传感器现场架构的有效传感器通信[1,2]和传感器融合[3,4]。 然而,随着传感器在现场操作中的使用越来越多,高效的部署策略越来越重要。 运动规划的地形模型获取的相关工作集中在机器人在未开发的“传感器场”中的运动[5]。 虽然地形的知识对于监视至关重要,但它并不直接解决传感器放置问题。
[13]提出了基于潜在领域概念的移动传感器的自我部署。 这些场被构造成使得每个传感器被障碍物和其他传感器排斥,从而迫使网络将自身扩散通过环境。 已经显示出潜在的现场方法在没有全球地图,沟通和显式推理的情况下实现良好的覆盖。 区域覆盖成为紧急系统级财产。 然而,自我部署不能为静态传感器提供一个解决方案,需要以特定的模式进行部署,例如用于环境监测。
无线传感器网络中部署的一个相关问题是空间定位[14]。 在无线传感器网络中,节点需要能够在各种环境和不同的距离尺度上定位自身。 被称为定位的这个问题在传感器还没有根据设定的模式展开的情况下是特别重要的。 当传感器从战场上的飞机抛出时,可能会由于漂移而移动的水下传感器。 最近提出了一些用于精细和粗粒度定位的技术[11,14,15]。
文献[12]也讨论了传感器给定放置提供的覆盖问题。 覆盖和部署的问题根本是相互关联的。 为了实现确定性覆盖,必须根据预定义的形状部署静态网络。因此,传感器的最佳部署也将提供良好的区域覆盖。
将传感器放置在二维和三维网格上,作为组合优化问题,并用整数线性规划求解[6,7]。 这种方法有两个主要缺点。 首先,计算复杂度使得该方法对于大问题实例不可行。 第二,网格覆盖方法依赖于“完美”传感器检测,即传感器预期在每种情况下产生二进制的是/否检测结果。 然而,众所周知,传感器读数存在固有的不确定性,因此传感器检测必须被概率地建模[3]。
传感器放置问题与艺术画廊问题(AGP)在艺术画廊定理[8]中存在着非常相似的关系。 AGP问题可以非正式地说明为确定覆盖艺术画廊内部所需的最少卫兵数量。 (艺术画廊的内部由多边形表示)。在文献中已经研究了AGP的几种变体,包括移动防护装置,外部可视性以及具有孔的多边形。 我们的传感器放置问题与AGP的不同之处有两个基本的方面:(a)传感器可以具有不同的范围,不同于在AGP中,卫星被认为具有相似的能力,(b)与卫兵的入侵者检测不同,传感器检测结果是概率的。 其他相关工作包括放置一定数量的传感器以降低通信成本[9],给定目标分布的最佳传感器放置[10]。
本文的其余部分组织如下。 在第2节中,我们描述了我们的传感器检测模型以及我们对地形建模的方法。 第3节描述了放置传感器以提供传感器场的足够覆盖的程序。 我们还展示了如何增加放置算法以提供网格点的差异覆盖(基于安全性和战术重要性的相对度量)。 第4节介绍各种问题实例的实验结果。 随机传感器放置的比较,以突出提出的方法的有效性。 最后,第5节总结了本文,并介绍了未来工作的方向。
2 Sensor and Terrain Model
传感器放置需要准确但计算可行的传感器检测模型。 在这个工作中,我们首先假设传感器场由网格点组成。 网格的粒度(连续网格点之间的距离)由传感器放置所需的精度决定。
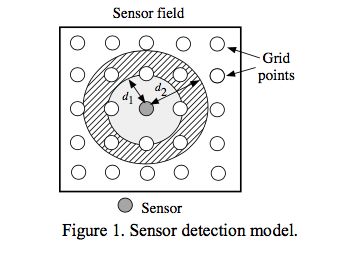
我们假设传感器检测到目标的概率随着目标和传感器之间的距离而呈指数变化。该模型如图1所示。传感器的距离d处的目标被该传感器以概率e^-αd检测。参数α可用于建模传感器的质量和其检测概率随距离减小的速率。显然,如果目标位置和传感器位置重合,检测概率为1。对于传感器场中的每两个网格点i和j,我们将两个概率值相关联:(i)pij,其表示网格点i处的传感器在网格点j处检测到的目标的概率; (ii)pji,其表示在网格点j处由传感器检测到网格点i处的目标的概率。在没有障碍物的情况下,这些值是对称的,即pij = pji。然而,我们将在本节稍后展示这些值在存在障碍物时不必相等。
请注意,传感器检测模型的选择不会以任何方式限制放置算法的适用性。 检测模型只是放置算法的输入参数。 因此,可以考虑替代检测模型,而不需要重新设计放置算法。
接下来,我们将介绍如何在这个框架中模拟地形中的障碍。 多个传感器,例如 红外摄像机,需要一个目标躺在他们的视线。 障碍物引起闭塞并使这种传感器对检测无效。 我们假设在传感器放置之前获取地形的知识,例如。 通过卫星图像。 然后通过改变适当的网格点对的检测概率来建模障碍物。 例如,如果诸如建筑物或树叶的对象存在于从网格点i到网格点j的视线中,则我们设置pij = 0。部分遮挡也可以通过设置非零但小的值来建模 为检测概率。 我们在这里做出的唯一假设是障碍是静态的,因为我们不考虑传感器布局或网格覆盖作为时间的函数。
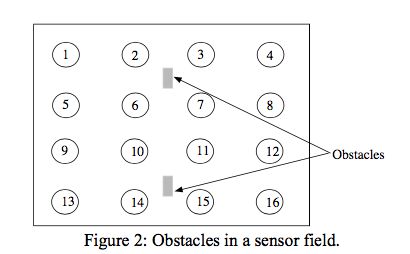
例如,考虑图2的传感器领域所示的两个障碍物。该图中的网格点从1到16编号。如果我们假设这些障碍物是对称的,那么它们会导致p36,p63,p27,p72, 以及要呈现零的许多其他检测概率。 确定对于任何两个网格点i和j,pij是否受障碍物影响是直接的。 每个网格点与平面中的一对(x,y)坐标相关联。 类似地,障碍物也具有相关联的(x,y)坐标。 我们确定连接i和j的直线方程。 如果障碍物的坐标满足该等式,则将概率pij设置为零。
在许多实际情况下,传感器场中的障碍物是不对称的,即pij = 0并不意味着pji = 0。这可能发生在例如丘陵地形的情况下。 较低高度的传感器不太可能在较高的高度检测到目标,但是在较高高度的传感器可以检测到较低高度的目标。 通过使用适当的检测概率值,可以在我们的框架中轻松建模这种情况。
3 Sensor Placement Algorithm
在本节中,我们描述了传感器领域(无障碍物和无障碍物)中给定的一组检测概率的传感器放置算法。 传感器放置算法的目标是确定传感器的最小数量及其位置,以便每个网格点都以最小置信水平覆盖。 我们使用术语覆盖阈值来引用这个置信水平。 提供覆盖阈值T作为放置算法的输入。 我们的目标是确保每个网格点的概率至少为T。
我们首先为传感器场中的所有网格点对生成传感器检测矩阵D =[pij]。 对于n×n格,我们共有n2个网格点,因此矩阵D由n2列和n2列组成,总共包含n4个元素。
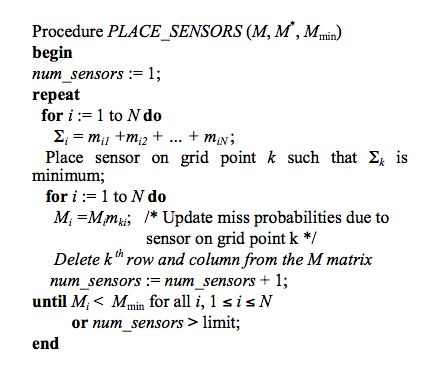
从传感器检测矩阵D,我们确定未知概率矩阵M = mij,其中mij = 1-pij。 我们不会在传感器放置算法中直接使用D。 相反,我们使用遗漏概率矩阵M中的条目。传感器布置算法使用贪心启发式来一次确定一个传感器的最佳位置。 该算法是迭代的,并且在每次迭代期间将一个传感器放置在传感器场中。 当达到传感器数量的预设上限,或者达到网格点的足够覆盖时,终止。
我们将矢量M * =(M1,M2,...,MN)定义为传感器场中N = n^2个网格点的未知概率集合。 该向量中的条目Mi表示网格点i未被集成在传感器场中的传感器集合覆盖的概率。 在放置算法开始时,矢量M被初始化为全1矢量,即M * =(1,1,...,1)。 放置在传感器区域中的每个传感器减少该矢量中的一个或多个条目。 当故障概率矩阵中的相应行和列变为冗余时,传感器的放置也将故障概率矩阵的大小减小1。 传感器放置算法的伪代码步骤如下。 令Mmin = 1-T为任何网格点允许的未命中概率的最大值。
上述伪代码描述使得传感器检测是独立的隐含假设,即如果传感器以概率p1在网格点处检测到目标,并且另一个以概率p2在该网格点处检测到相同目标,则目标的未命中概率 是(1-p1)(1-p2)。 作为未来工作的一部分,当传感器读数相关时,我们将模拟现实情况。
请注意,通过Σi参数在PLACE_SENSORS过程中测量由附加传感器引起的网格覆盖的有效性。 这种方法尝试通过总结各个网格点的遗漏概率的变化来评估附加传感器的全局影响。 还可以考虑采用诸如聚焦最小化最弱链接(max {Σi})的替代方法; 然而,我们在这项工作中没有评估这些方法。
接下来我们将介绍传感器布置方法如何有助于网格点的优先覆盖。 在典型的军事力量保护或民防方案中,某些装置需要给予额外的保护。 这样的设施可能包括核电厂,指挥总部或民政管理中心。
为了模拟优先覆盖,我们为每个网格点i分配不同的保护概率pri。 然后将网格点i的未知概率阈值表示为Mimin = 1-pri。 程序PLACE_SENSORS被修改为使得重复/直到循环的终止标准基于检查是否已经达到每个网格点的各个未知概率阈值。