蓝桥杯之单片机设计与开发(31)——2016_第七届_蓝桥杯_国赛——“电压、频率采集设备”
这一个题写的我是头皮发麻,写了一个上午才给写完。测试发现应该没什么bug,先把博客发了吧。
这个题和官方给的模拟题是一个,具体可以点击链接跳转过去看看。
http://dasai.lanqiao.cn/pages/dasai/personal_province_apply.html?key=c46ca5d7d324923baf6910e8940fdd85
1、题目
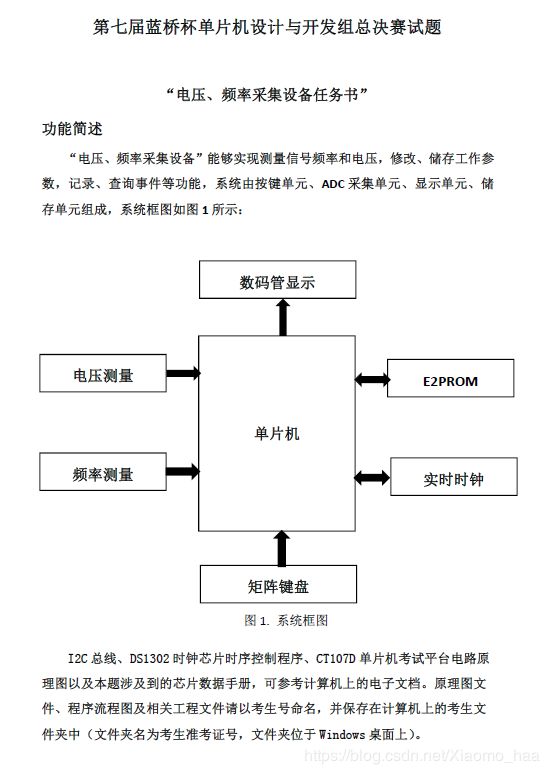
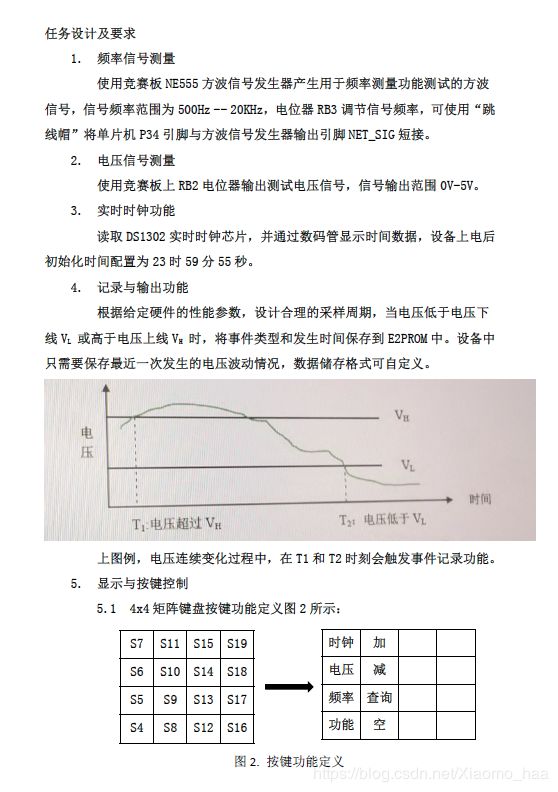
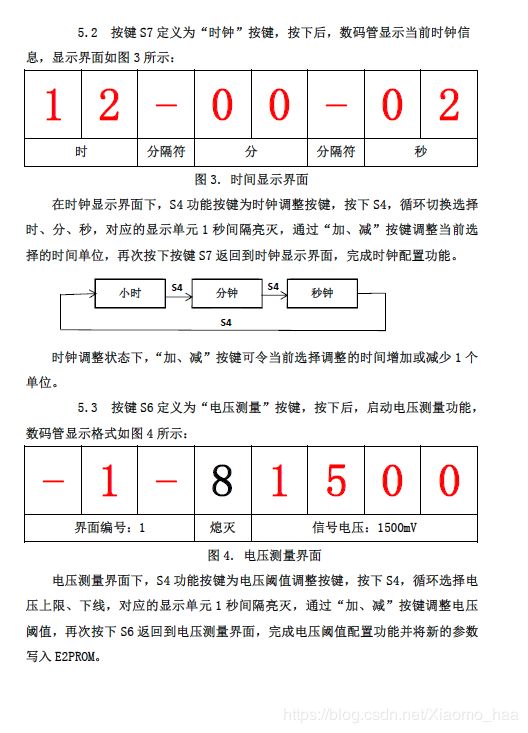
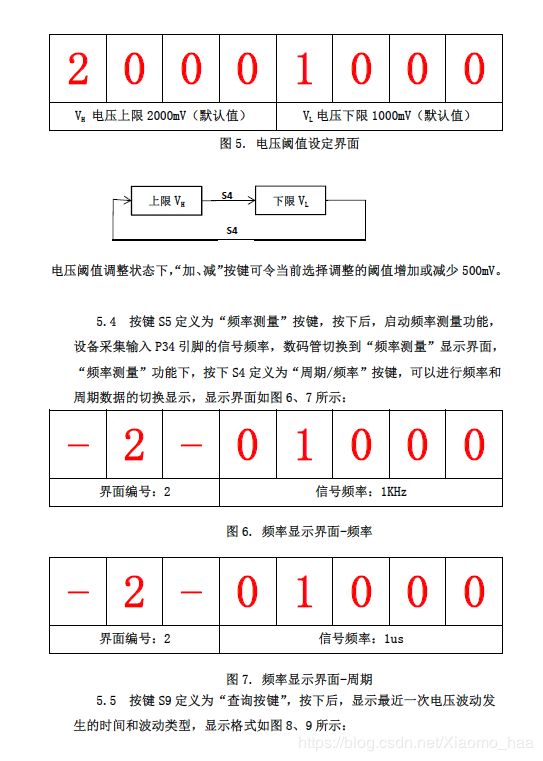

2、题目说明
先去体测跑1000米,回来再写=,=
3、代码
下载链接:https://download.csdn.net/download/xiaomo_haa/11025753
main.c
#include
#include "sys.h"
bit flag_100ms = 0, flag_1s = 0, flag_5ms = 0, flag_500ms = 0;
bit flag_change = 0, flag_write = 0;
bit flag_valtext = 0, flag_fretext = 0, flag_val = 1;
bit flag_readtime = 1;
u8 mode_time = 0, mode_val = 0, mode_fre = 0;
u8 mode = 0;
u8 Realtime[] = {0x19, 0x03, 0x15, 0x23, 0x59, 0x55, 0x05};
u8 Backuptime[] = {0x19, 0x03, 0x15, 0x23, 0x59, 0x55, 0x05};
u8 Val_time[] = {0x19, 0x03, 0x15, 0x23, 0x59, 0x55, 0x05, 0};
u8 Real_val[] = {0xdd, 20, 15, 0, 0};
u16 counter = 0, fre, fre_time;
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void main(void)
{
static u8 index = 0;
AllInit();
Timer0Init();
Timer1Init();
InitDS1302(Realtime);
if(Read_E2PROM(0) == 0xdd)
{
Real_val[1] = Read_E2PROM(1);
Real_val[2] = Read_E2PROM(2);
}
else
{
Write_E2PROM(0, Real_val[0]);
Delay5ms();
Write_E2PROM(1, Real_val[1]);
Delay5ms();
Write_E2PROM(2, Real_val[2]);
Delay5ms();
}
if(Read_E2PROM(3) < 2)
{
Val_time[7] = Read_E2PROM(3);
Val_time[3] = Read_E2PROM(4);
Val_time[4] = Read_E2PROM(5);
Val_time[5] = Read_E2PROM(6);
}
EA = 1;
while(1)
{
if(flag_100ms)
{
flag_100ms = 0;
GetRealTime(Realtime);
Real_val[3] = (u8)(Read_AIN(0x03) / 100);
Real_val[4] = (u8)(Read_AIN(0x03) % 100);
//测电压
if(flag_valtext)
{
if(flag_val == 0)
{
if((Real_val[3] < Real_val[1]) && (Real_val[3] > Real_val[2]))
flag_val = 1;
}
if((Real_val[3] >= Real_val[1]) && flag_val) //上限
{
flag_write = 1;
Val_time[7] = 1;
flag_val = 0;
}
else if((Real_val[3] <= Real_val[2]) && flag_val) //下限
{
flag_write = 1;
Val_time[7] = 0;
flag_val = 0;
}
if(flag_write) //读取电压事件时的时间
{
Val_time[3] = Realtime[3];
Val_time[4] = Realtime[4];
Val_time[5] = Realtime[5];
}
}
}
//写事件类型和时间
if(flag_write)
{
if(flag_5ms)
{
flag_5ms = 0;
switch(index)
{
case 0: Write_E2PROM(3, Val_time[7]); break;
case 1: Write_E2PROM(4, Val_time[3]); break;
case 2: Write_E2PROM(5, Val_time[4]); break;
case 3: Write_E2PROM(6, Val_time[5]); flag_write = 0; break;
}
index ++;
index &= 0x03;
}
}
//测频
if(flag_fretext)
{
if(flag_500ms)
{
TR0 = 0;
flag_500ms = 0;
counter = TH0 * 256 + TL0;
TH0 = TL0 = 0;
fre = counter * 2;
fre_time = (u16)(1000000 / fre);
TR0 = 1;
}
}
//备份时间
if(flag_readtime == 1)
{
Backuptime[3] = Realtime[3];
Backuptime[4] = Realtime[4];
Backuptime[5] = Realtime[5];
}
KeyPress();
TubeShow();
}
}
sys..c
#include "sys.h"
void AllInit(void)
{
P2 = (P2 & 0x1f) | 0x80;
P0 = 0xff;
P2 = (P2 & 0x1f) | 0xc0;
P0 = 0x00;
P2 = (P2 & 0x1f) | 0xa0;
P0 = 0x00;
P2 = P2 & 0x1f;
}
void Timer1Init(void) //1毫秒@11.0592MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0xCD; //设置定时初值
TH1 = 0xD4; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1;
}
void Time1(void) interrupt 3
{
static u16 T1count1 = 0, T1count2 = 0;
T1count1 ++;
if(T1count1 % 2 == 0) //2ms
TubeScan();
if(T1count1 % 5 == 0) //5ms
flag_5ms = 1;
if(T1count1 % 100 == 0) //100ms
flag_100ms = 1;
if(T1count1 >= 500) //500ms
{
T1count1 = 0;
if(flag_fretext)
flag_500ms = 1;
}
if(mode_time || mode_val || (mode == 3))
{
T1count2 ++;
if(T1count2 >= 1000) //1s
{
T1count2 = 0;
flag_1s = ~flag_1s;
}
}
else
T1count2 = 0;
KeyScan();
}
void Timer0Init(void)
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD = 0x04; //设置定时器0为16位自动重装载外部记数模式
TH0 = TL0 = 0; //设置定时器0初始值
TR0 = 1; //定时器0开始工作
}
sys.h
#ifndef _SYS_H_
#define _SYS_H_
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long u32;
#include
#include
#include "ds1302.h"
#include "iic.h"
extern bit flag_100ms, flag_1s, flag_5ms, flag_500ms;
extern bit flag_change, flag_write;
extern bit flag_valtext, flag_fretext, flag_val;
extern bit flag_readtime;
extern u8 mode_time, mode_val, mode_fre;
extern u8 mode;
extern u8 Realtime[];
extern u8 Backuptime[];
extern u8 Val_time[];
extern u8 Real_val[];
extern u16 counter, fre, fre_time;
void AllInit(void);
void Timer0Init(void);
void Timer1Init(void);
void TubeScan(void);
void TubeShow(void);
void KeyScan(void);
void KeyPress(void);
#endif
display.c
#include "sys.h"
unsigned char code table[]={0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8,
0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e,
0xff, 0xbf};
unsigned char TubeBuff[] = {0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff};
unsigned char smg1, smg2, smg3, smg4, smg5, smg6, smg7, smg8;
void TubeScan(void)
{
static u8 index = 0;
P0 = 0x00;
P2 = (P2 & 0x1f) | 0xc0;
P0 = 0x01 << index;
P2 = P2 & 0x1f;
P0 = 0xff;
P2 = (P2 & 0x1f) | 0xe0;
P0 = TubeBuff[index];
P2 = P2 & 0x1f;
index ++;
index &= 0x07;
}
void TubeShow(void)
{
if(mode == 1)
{
if(mode_time == 0)
{
smg1 = Realtime[3] >> 4;
smg2 = Realtime[3] & 0x0f;
smg4 = Realtime[4] >> 4;
smg5 = Realtime[4] & 0x0f;
smg7 = Realtime[5] >> 4;
smg8 = Realtime[5] & 0x0f;
if(smg8 % 2 == 0)
smg3 = smg6 = 16;
else
smg3 = smg6 = 17;
}
else if(mode_time > 0)
{
smg1 = Backuptime[3] >> 4;
smg2 = Backuptime[3] & 0x0f;
smg3 = smg6 = 17;
smg4 = Backuptime[4] >> 4;
smg5 = Backuptime[4] & 0x0f;
smg7 = Backuptime[5] >> 4;
smg8 = Backuptime[5] & 0x0f;
if(flag_1s)
{
switch(mode_time)
{
case 1: smg1 = smg2 = 16; break;
case 2: smg4 = smg5 = 16; break;
case 3: smg7 = smg8 = 16; break;
}
}
}
}
else if(mode == 2)
{
if(mode_val == 0)
{
smg1 = smg3 = 17;
smg2 = 1;
smg4 = 16;
smg5 = Real_val[3] / 10;
smg6 = Real_val[3] % 10;
smg7 = Real_val[4] / 10;
smg8 = Real_val[4] % 10;
}
else
{
smg1 = Real_val[1] / 10;
smg2 = Real_val[1] % 10;
smg3 = smg4 = 0;
smg5 = Real_val[2] / 10;
smg6 = Real_val[2] % 10;
smg7 = smg8 = 0;
if(flag_1s)
{
if(mode_val == 1)
smg1 = smg2 = smg3 = smg4 = 16;
else if(mode_val == 2)
smg5 = smg6 = smg7 = smg8 = 16;
}
}
}
else if(mode == 3)
{
if(flag_1s)
{
smg1 = smg2 = smg3 = smg4 = smg5 = smg6 = 16;
smg7 = 0;
smg8 = Val_time[7];
}
else
{
smg1 = Val_time[3] >> 4;
smg2 = Val_time[3] &0x0f;
smg3 = smg6 = 17;
smg4 = Val_time[4] >> 4;
smg5 = Val_time[4] &0x0f;
smg7 = Val_time[5] >> 4;
smg8 = Val_time[5] &0x0f;
}
}
else if(mode == 4)
{
smg1 = smg3 = 17;
smg2 = 2;
if(mode_fre == 1)
{
smg4 = fre / 10000;
smg5 = (fre % 10000) / 1000;
smg6 = (fre % 1000) / 100;
smg7 = (fre % 100) /10;
smg8 = fre % 10;
}
else if(mode_fre == 2)
{
smg4 = fre_time / 10000;
smg5 = (fre_time % 10000) / 1000;
smg6 = (fre_time % 1000) / 100;
smg7 = (fre_time % 100) /10;
smg8 = fre_time % 10;
}
}
else
smg1 = smg2 = smg3 = smg4 = smg5 = smg6 = smg7 = smg8 = 16;
TubeBuff[3] = table[smg1];
TubeBuff[2] = table[smg2];
TubeBuff[1] = table[smg3];
TubeBuff[0] = table[smg4];
TubeBuff[7] = table[smg5];
TubeBuff[6] = table[smg6];
TubeBuff[5] = table[smg7];
TubeBuff[4] = table[smg8];
}
key.c
#include "sys.h"
sbit KeyOut1 = P4^4;
sbit KeyOut2 = P4^2;
sbit KeyOut3 = P3^5;
sbit KeyOut4 = P3^4;
sbit KeyIn1 = P3^0;
sbit KeyIn2 = P3^1;
sbit KeyIn3 = P3^2;
sbit KeyIn4 = P3^3;
unsigned char code KeyMap[4][4] = {{0x01, 0x02, 0x00, 0x00},
{0x03, 0x04, 0x00, 0x00},
{0x05, 0x06, 0x00, 0x00},
{0x07, 0x08, 0x00, 0x00}};
unsigned char KeyBuff[4][4] = {{0xff, 0xff, 0xff, 0xff},
{0xff, 0xff, 0xff, 0xff},
{0xff, 0xff, 0xff, 0xff},
{0xff, 0xff, 0xff, 0xff}};
unsigned char KeySta[4][4] = {{1,1,1,1},{1,1,1,1},{1,1,1,1},{1,1,1,1}};
unsigned char KeyBackup[4][4] = {{1,1,1,1}, {1,1,1,1}, {1,1,1,1}, {1,1,1,1}};
void KeyScan(void)
{
static u8 index = 0;
u8 i;
KeyBuff[0][index] = (KeyBuff[0][index] << 1) | KeyIn1;
KeyBuff[1][index] = (KeyBuff[1][index] << 1) | KeyIn2;
KeyBuff[2][index] = (KeyBuff[2][index] << 1) | KeyIn3;
KeyBuff[3][index] = (KeyBuff[3][index] << 1) | KeyIn4;
for(i = 0; i < 4; i ++)
{
if((KeyBuff[i][index] & 0x0f) == 0x00)
KeySta[i][index] = 0;
else if((KeyBuff[i][index] & 0x0f) == 0x0f)
KeySta[i][index] = 1;
}
index ++;
index &= 0x03;
switch(index)
{
case 0: KeyOut4 = 1; KeyOut1 = 0; break;
case 1: KeyOut1 = 1; KeyOut2 = 0; break;
case 2: KeyOut2 = 1; KeyOut3 = 0; break;
case 3: KeyOut3 = 1; KeyOut4 = 0; break;
}
}
void KeyAction(unsigned char keycode)
{
if(keycode == 0x01) //S7 显示时钟
{
mode = 1;
mode_time = 0;
if(flag_readtime == 0)
{
flag_readtime = 1;
if(flag_change == 1) //如果没有修改时间就显示实时时间
{
Realtime[3] = Backuptime[3];
Realtime[4] = Backuptime[4];
Realtime[5] = Backuptime[5];
}
SetRealTime(Realtime);
flag_change = 0;
}
}
else if(keycode == 0x03) //S6 电压测量
{
mode = 2;
mode_val = 0;
}
else if(keycode == 0x02) //S11 加
{
if(mode == 1) //时间
{
if(mode_time > 0)
{
Backuptime[mode_time + 2] ++;
if(mode_time == 1)
{
if((Backuptime[mode_time + 2] & 0x0f) > 9) //个位大于9
Backuptime[mode_time + 2] += 6; //加6修正
if(Backuptime[mode_time + 2] >= 0x24) //时钟上限
Backuptime[mode_time + 2] = 0x00;
}
else
{
if((Backuptime[mode_time + 2] & 0x0f) > 9) //个位大于9
Backuptime[mode_time + 2] += 6; //加6修正
if(Backuptime[mode_time + 2] >= 0x60) //分秒上限
Backuptime[mode_time + 2] = 0x00;
}
flag_change = 1;
}
}
else if(mode == 2) //电压
{
if(mode_val > 0)
{
Real_val[mode_val] += 5;
if(Real_val[mode_val] >= 50)
Real_val[mode_val] = 50;
if(Real_val[2] >= Real_val[1])
Real_val[2] = Real_val[1];
Write_E2PROM(mode_val, Real_val[mode_val]);
}
}
}
else if(keycode == 0x04) //S10 减
{
if(mode == 1) //时间
{
if(mode_time > 0)
{
if(((Backuptime[mode_time + 2] & 0x0f) == 0) && (Backuptime[mode_time + 2] > 0))
Backuptime[mode_time + 2] -= 6;
else if(Backuptime[mode_time + 2] == 0x00)
{
if(mode_time == 1)
Backuptime[mode_time + 2] = 0x23;
else
Backuptime[mode_time + 2] = 0x59;
}
else
Backuptime[mode_time + 2] --;
flag_change = 1;
}
}
else if(mode == 2) //电压
{
if(mode_val > 0)
{
if(Real_val[mode_val] >= 5)
Real_val[mode_val] -= 5;
else
Real_val[mode_val] = 0;
if(Real_val[1] <= Real_val[2])
Real_val[1] = Real_val[2];
Write_E2PROM(mode_val, Real_val[mode_val]);
}
}
}
else if(keycode == 0x05) //S5 频率测量
{
mode = 4;
flag_fretext = 1;
mode_fre = 1;
}
else if(keycode == 0x06) //S9 查询
{
mode = 3;
flag_valtext = 0;
}
else if(keycode == 0x07) //S4
{
if(mode == 1) //时间
{
flag_readtime = 0;
mode_time ++;
if(mode_time > 3)
mode_time = 1;
}
else if(mode == 2) //电压
{
mode_time = 0;
mode_val ++;
if(mode_val >= 3)
mode_val = 1;
}
else if(mode == 4) //频率
{
mode_fre ++;
if(mode_fre > 2)
mode_fre = 1;
}
}
if(mode != 3)
flag_valtext = 1;
if(mode != 4)
flag_fretext = 1;
}
void KeyPress(void)
{
u8 i, j;
for(i = 0; i < 4; i ++)
{
for(j = 0; j < 4; j ++)
{
if(KeyBackup[i][j] != KeySta[i][j])
{
if(KeySta[i][j] == 0)
KeyAction(KeyMap[i][j]);
KeyBackup[i][j] = KeySta[i][j];
}
}
}
}
iic.c
#include "sys.h"
#define somenop {_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}
//总线引脚定义
sbit SDA = P2^1; /* 数据线 */
sbit SCL = P2^0; /* 时钟线 */
//总线启动条件
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
somenop;
SDA = 0;
somenop;
SCL = 0;
}
//总线停止条件
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
somenop;
SDA = 1;
}
//应答位控制
void IIC_Ack(bit ackbit)
{
if(ackbit)
{
SDA = 0;
}
else
{
SDA = 1;
}
somenop;
SCL = 1;
somenop;
SCL = 0;
SDA = 1;
somenop;
}
//等待应答
bit IIC_WaitAck(void)
{
SDA = 1;
somenop;
SCL = 1;
somenop;
if(SDA)
{
SCL = 0;
IIC_Stop();
return 0;
}
else
{
SCL = 0;
return 1;
}
}
//通过I2C总线发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0;i<8;i++)
{
if(byt&0x80)
{
SDA = 1;
}
else
{
SDA = 0;
}
somenop;
SCL = 1;
byt <<= 1;
somenop;
SCL = 0;
}
}
//从I2C总线上接收数据
unsigned char IIC_RecByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++)
{
SCL = 1;
somenop;
da <<= 1;
if(SDA)
da |= 0x01;
SCL = 0;
somenop;
}
return da;
}
unsigned int Read_AIN(unsigned char chn)
{
unsigned int val;
unsigned char dat;
EA = 0;
IIC_Start(); //IIC总线起始信号
IIC_SendByte(0x90); //PCF8591的写设备地址
IIC_WaitAck(); //等待从机应答
IIC_SendByte(chn); //写入PCF8591的控制字节
IIC_WaitAck(); //等待从机应答
IIC_Stop(); //IIC总线停止信号
IIC_Start(); //IIC总线起始信号
IIC_SendByte(0x91); //PCF8591的读设备地址
IIC_WaitAck(); //等待从机应答
dat = IIC_RecByte(); //读取PCF8591通道3的数据
IIC_Ack(0); //产生非应答信号
IIC_Stop(); //IIC总线停止信号
val = (u16)(dat * (5000 / 255));
EA = 1;
return val;
}
void Write_E2PROM(unsigned char add, unsigned char dat)
{
EA = 0;
IIC_Start();
IIC_SendByte(0xa0); //发送器件地址
IIC_WaitAck();
IIC_SendByte(add); //发送操作地址
IIC_WaitAck();
IIC_SendByte(dat); //写一字节
IIC_WaitAck();
IIC_Stop();
somenop;
EA = 1;
}
unsigned char Read_E2PROM(unsigned char add)
{
unsigned char d;
IIC_Start();
IIC_SendByte(0xa0); //发送器件地址
IIC_WaitAck();
IIC_SendByte(add); //发送要操作的地址
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0xa1); //发送读操作
IIC_WaitAck();
d = IIC_RecByte(); //读一字节
IIC_Ack(0);
IIC_Stop();
return d;
}
iic.h
#ifndef _IIC_H
#define _IIC_H
//函数声明
void IIC_Start(void);
void IIC_Stop(void);
void IIC_Ack(bit ackbit);
void IIC_SendByte(unsigned char byt);
bit IIC_WaitAck(void);
unsigned char IIC_RecByte(void);
unsigned int Read_AIN(unsigned char chn);
void Write_E2PROM(unsigned char add, unsigned char dat);
unsigned char Read_E2PROM(unsigned char add);
#endifds1302.c
#include "sys.h"
sbit DS1302_IO = P2^3;
sbit DS1302_CK = P1^7;
sbit DS1302_CE = P1^3;
void DS1302ByteWrite(unsigned char dat)
{
unsigned char mask;
DS1302_IO = 1; //拉低IO总线
for(mask = 0x01; mask != 0; mask <<= 1) //低位在前,逐位移出
{
if((dat&mask) != 0) //首先输出该位数据
DS1302_IO = 1;
else
DS1302_IO = 0;
DS1302_CK = 1; //拉高时钟线
DS1302_CK = 0; //拉低时钟线,完成一个位的操作
}
DS1302_IO = 1; //写完之后确保释放IO总线
}
unsigned char DS1302ByteRead(void)
{
unsigned char mask, dat = 0;
for(mask = 0x01; mask != 0; mask <<= 1) //低位在前,逐位读取
{
if(DS1302_IO) //首先读取此时的IO引脚,并设置dat中的对应位
dat |= mask;
DS1302_CK = 1; //拉高时钟
DS1302_CK = 0; //再拉低时钟,完成一个位的操作
}
return dat; //返回读到的字节数据
}
void DS1302SingleWrite(unsigned char reg, unsigned char dat)
{
DS1302_CE = 1; //使能片选信号
DS1302ByteWrite((reg << 1) | 0x80); //发送写寄存器指令
DS1302ByteWrite(dat); //写入字节数据
DS1302_CE = 0; //除能片选信号
}
unsigned char DS1302SingleRead(unsigned char reg)
{
unsigned char dat;
DS1302_CE = 1; //使能片选信号
DS1302ByteWrite((reg << 1) | 0x81); //发送读寄存器指令
dat = DS1302ByteRead(); //读取字节数据
DS1302_CE = 0; //除能片选信号
DS1302_IO = 0; //单字节读必须加的!
return dat;
}
void DS1302BurstWrite(unsigned char *dat)
{
unsigned char i;
DS1302_CE = 1;
DS1302ByteWrite(0xBE); //发送突发写寄存器指令
for(i = 0; i < 7; i ++) //连续写入8字节数据
DS1302ByteWrite(*dat++);
DS1302_CE = 0;
}
void DS1302BurstRead (unsigned char *dat)
{
unsigned char i;
DS1302_CE = 1;
DS1302ByteWrite(0xBF); //发送突发读寄存器指令
for(i = 0; i < 7; i++) //连续读取8个字节
dat[i] = DS1302ByteRead();
DS1302_CE = 0;
DS1302_IO = 0; //突发读必须加
}
void GetRealTime(unsigned char *time)
{
unsigned char buf[8];
DS1302BurstRead(buf);
time[0] = buf[6];
time[1] = buf[4];
time[2] = buf[3];
time[3] = buf[2];
time[4] = buf[1];
time[5] = buf[0];
time[6] = buf[5];
}
void SetRealTime(unsigned char *time)
{
unsigned char buf[8];
buf[7] = 0;
buf[6] = time[0];
buf[4] = time[1];
buf[3] = time[2];
buf[2] = time[3];
buf[1] = time[4];
buf[0] = time[5];
buf[5] = time[6];
DS1302BurstWrite(buf);
}
void InitDS1302(unsigned char *time)
{
unsigned char dat;
signed char i = 7;
unsigned char timeinit[8];
while(i >= 0)
{
timeinit[i] = time[i];
i --;
}
DS1302_CE = 0; //初始化DS1302通信引脚
DS1302_CK = 0;
dat = DS1302SingleRead(0); //读取秒寄存器
DS1302SingleWrite(7, 0x00); //撤销写保护以允许写入数据
SetRealTime(&timeinit); //设置DS1302时间
}
ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
void DS1302ByteWrite(unsigned char dat);
unsigned char DS1302ByteRead(void);
void DS1302SingleWrite(unsigned char reg, unsigned char dat);
unsigned char DS1302SingleRead(unsigned char reg);
void DS1302BurstWrite(unsigned char *dat);
void DS1302BurstRead (unsigned char *dat);
void GetRealTime(unsigned char *time);
void SetRealTime(unsigned char *time);
void InitDS1302(unsigned char *time);
#endif