深度学习——Resnet50
本文是讲解如何用keras实现ResNet,并未讲述深层的原理及其效果,具体内容请于原著论文查阅。
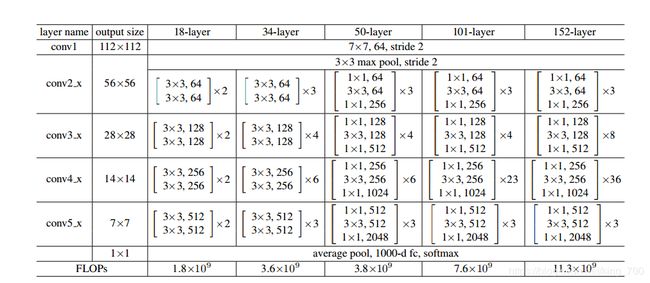
上图是ResNet从Resnet18到Resnet152架构,以ResNet50为例。stage2对应上图conv2_x,以此类推。
def ResNet50(input_shape=(224, 224, 3), classes=1000):
img_input = Input(shape=input_shape)
if K.image_data_format() == 'channels_last':
bn_axis = 3
else:
bn_axis = 1
# stage 1
x = Conv2D(64, (7, 7), strides=(2, 2), padding='same', name='conv1')(img_input)
x = BatchNormalization(axis=bn_axis, name='bn_conv1')(x)
x = Activation('relu')(x)
x = MaxPooling2D((3, 3), strides=(2, 2))(x)
# stage 2
x = conv_block(x, 3, [64, 64, 256], stage=2, block='a', strides=(1, 1))
x = identity_block(x, 3, [64, 64, 256], stage=2, block='b')
x = identity_block(x, 3, [64, 64, 256], stage=2, block='c')
# stage 3
x = conv_block(x, 3, [128, 128, 512], stage=3, block='a')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='b')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='c')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='d')
# stage 4
x = conv_block(x, 3, [256, 256, 1024], stage=4, block='a')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='b')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='c')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='d')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='e')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='f')
# stage 5
x = conv_block(x, 3, [512, 512, 2048], stage=5, block='a')
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='b')
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='c')
x = AveragePooling2D((7, 7), name='avg_pool')(x)
x = Flatten()(x)
x = Dense(classes, activation='softmax', name='fc1000')(x)
model = Model(img_input, x, name='resnet50')
return model
Resnet50的残差块数量为[3,4,6,3],stage2-stage5的第一个残差块有shortcut结构,所有命名为conv_block
def conv_block(input_tensor, kernel_size, filters, stage, block, strides=(2, 2)):
filters1, filters2, filters3 = filters
if K.image_data_format() == 'channels_last':
bn_axis = 3
else:
bn_axis = 1
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
x = Conv2D(filters1, (1, 1), strides=strides, name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(axis=bn_axis, name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
x = Conv2D(filters2, kernel_size, padding='same', name=conv_name_base + '2b')(x)
x = BatchNormalization(axis=bn_axis, name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(axis=bn_axis, name=bn_name_base + '2c')(x)
shortcut = Conv2D(filters3, (1, 1), strides=strides, name=conv_name_base + '1')(input_tensor)
shortcut = BatchNormalization(axis=bn_axis, name=bn_name_base + '1')(shortcut)
x = layers.add([x, shortcut])
x = Activation('relu')(x)
return xdef identity_block(input_tensor, kernel_size, filters, stage, block):
filters1, filters2, filters3 = filters
if K.image_data_format() == 'channels_last':
bn_axis = 3
else:
bn_axis = 1
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
x = Conv2D(filters1, (1, 1), name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(axis=bn_axis, name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
x = Conv2D(filters2, kernel_size, padding='same', name=conv_name_base + '2b')(x)
x = BatchNormalization(axis=bn_axis, name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(axis=bn_axis, name=bn_name_base + '2c')(x)
x = layers.add([x, input_tensor])
x = Activation('relu')(x)
return x