蓝桥杯——第五届省赛_简易温度装置
一、使用到的模块
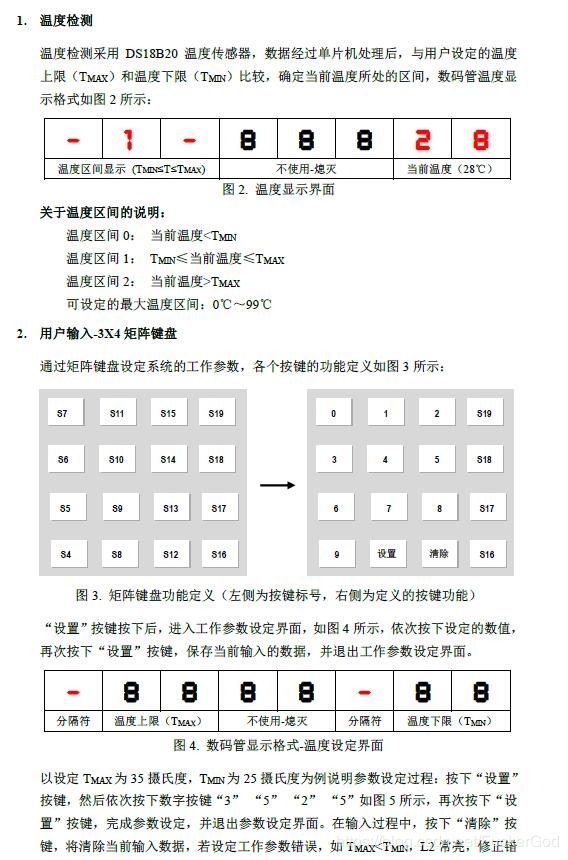
矩阵键盘,数码管,LED,DS18B20,继电器
题目要求

二、代码部分
实验平台:CT107D
实验芯片:stc15f2k60s2
实验现象:完成题目要求
代码如下
keydrive.c
#includekeydrive.h
#ifndef __KEYDRIVE_H
#define __KEYDRIVE_H
#define set 0x99
#define clr 0x88
sbit key_out_1 = P3^0;//行扫描
sbit key_out_2 = P3^1;
sbit key_out_3 = P3^2;
sbit key_out_4 = P3^3;
sbit key_in_1 = P4^4;//列扫描
sbit key_in_2 = P4^2;
sbit key_in_3 = P3^5;
sbit key_in_4 = P3^4;
void keyscan(void);
void keyfun(unsigned char key_val);
void keydrive(void);
#endif
onewire.c
#include "stc15f2k60s2.h"
sbit DQ = P1^4; //单总线接口
//单总线延时函数
void Delay_OneWire(unsigned int t) //STC89C52RC
{
t = t*12;
while(t--);
}
//通过单总线向DS18B20写一个字节
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//从DS18B20读取一个字节
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20设备初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
unsigned int duwendu()
{
unsigned char high,low;
unsigned int temp;
//ET0 = 0;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
Delay_OneWire(200);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low = Read_DS18B20();
high = Read_DS18B20();
temp = high<<8;
temp |= low;
temp = temp*0.0625;
//ET0 = 1;
return temp;
}
onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
unsigned char rd_temperature(void); //; ;
unsigned int read_temp();
#endif
main.c
#include