蓝桥杯之单片机设计与开发(27)——2014_第五届_蓝桥杯_省赛——“简易温度采集与控制装置”
今天在图书馆待一天,昨天写好的程序,今天才发博客。=,=
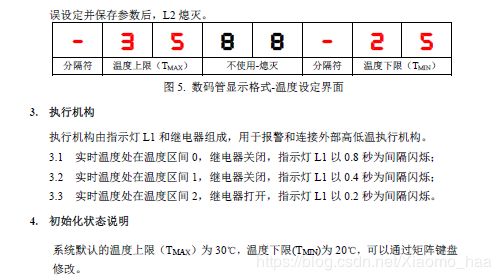
1、题目

2、代码
下载链接:https://download.csdn.net/download/xiaomo_haa/11010289
main.c
#include
#include "sys.h"
u8 temper_low = 20, temper_high = 30, mode = 0;
u8 temper_range[] = {3, 0, 2, 0}, temp_backup[] = {16, 16, 16, 16};
int Realtemper = 0;
bit flag_option = 0;
bit flag_right = 1;
bit flag_200ms = 0;
void main(void)
{
int tem = 0;
AllInit();
Start18B20();
Timer0Init();
EA = 1;
while(1)
{
if(flag_200ms == 1)
{
flag_200ms = 0;
Get18B20Temp(&tem);
tem >>= 4;
if((tem >= 0) && (tem <= 75))
Realtemper = tem;
Start18B20();
}
if(flag_option == 0)
{
if(Realtemper < temper_low)
mode = 0;
else if((Realtemper >= temper_low) && (Realtemper <= temper_high))
mode = 1;
else
mode = 2;
}
KeyPress();
TubeShow();
}
} sys.c
#include "sys.h"
void AllInit(void)
{
P2 = (P2 & 0x1f) | 0x80;
P0 = 0xff;
P2 = (P2 & 0x1f) | 0xc0;
P0 = 0x00;
P2 = (P2 & 0x1f) | 0xa0;
P0 = 0x00;
P2 = P2 & 0x1f;
}
void Timer0Init(void) //1毫秒@11.0592MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初值
TH0 = 0xD4; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
}
void Timer0(void) interrupt 1
{
static u16 T0count1 = 0;
static u16 T0count2 = 0;
u16 time = 0;
static bit flag_led = 0;
u8 leddat;
T0count1 ++;
T0count2 ++;
if(T0count1 >= 400) //200ms
{
T0count1 = 0;
flag_200ms = 1;
}
if(mode == 0)
{
time = 800;
P2 = (P2 & 0x1f) | 0xa0;
P0 = 0x00;
P2 = P2 & 0x1f;
}
else if(mode == 1)
{
time = 400;
P2 = (P2 & 0x1f) | 0xa0;
P0 = 0x00;
P2 = P2 & 0x1f;
}
else if(mode == 2)
{
time = 200;
P0 = 0x00;
P2 = (P2 & 0x1f) | 0xa0;
P0 = 0x10;
P2 = P2 & 0x1f;
}
if(T0count2 >= time)
{
T0count2 = 0;
flag_led = ~flag_led;
if(flag_led == 1)
leddat = 0xfe;
else
leddat = 0xff;
}
if(flag_option == 0)
LEDLight(leddat);
else if((flag_option = 1) && (flag_right == 1))
LEDLight(0xff);
else if((flag_option = 1) && (flag_right == 0))
LEDLight(0xfd);
TubeScan();
KeyScan();
}
sys.h
#ifndef _SYS_H_
#define _SYS_H_
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long u32;
#include
#include
#include "ds18b20.h"
extern u8 temper_low, temper_high, mode;
extern u8 temper_range[], temp_backup[];
extern int Realtemper;
extern bit flag_option;
extern bit flag_right;
extern bit flag_200ms;
//function
void AllInit(void);
void Timer0Init(void);
void TubeScan(void);
void TubeShow(void);
void LEDLight(unsigned char dat);
void KeyScan(void);
void KeyAction(u8 keycode);
void KeyPress(void);
//pin
sbit relay = P0^5;
#endif
display.c
#include "sys.h"
unsigned char code table[]={0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8,
0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e,
0xff, 0xbf};
u8 TubeBuff[] = {0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff};
u8 smg1, smg2, smg3, smg4, smg5, smg6, smg7, smg8;
void TubeScan(void)
{
static u8 index = 0;
P2 = (P2 & 0x1f) | 0xe0;
P0 = 0xff;
P2 = (P2 & 0x1f) | 0xc0;
P0 = (0x01 << index);
P2 = (P2 & 0x1f) | 0xe0;
P0 = TubeBuff[index];
P2 = P2 & 0x1f;
index ++;
index &= 0x07;
}
void TubeShow(void)
{
if(flag_option)
{
smg1 = smg6 = 17; //-
smg4 = smg5 = 16; //熄灭
smg2 = temper_range[0];
smg3 = temper_range[1];
smg7 = temper_range[2];
smg8 = temper_range[3];
}
else if(flag_option == 0)
{
smg1 = smg3 = 17; //-
smg4 = smg5 = smg6 = 16; //熄灭
smg2 = mode;
smg7 = Realtemper / 10;
smg8 = Realtemper % 10;
}
TubeBuff[0] = table[smg1];
TubeBuff[1] = table[smg2];
TubeBuff[2] = table[smg3];
TubeBuff[3] = table[smg4];
TubeBuff[4] = table[smg5];
TubeBuff[5] = table[smg6];
TubeBuff[6] = table[smg7];
TubeBuff[7] = table[smg8];
}
void LEDLight(unsigned char dat)
{
P0 = 0xff;
P2 = (P2 & 0x1f) | 0x80;
P0 = dat;
P2 = P2 & 0x1f;
}
key.c
#include "sys.h"
sbit Output0 = P4^4;
sbit Output1 = P4^2;
sbit Output2 = P3^5;
sbit Output3 = P3^4;
sbit Input0 = P3^0;
sbit Input1 = P3^1;
sbit Input2 = P3^2;
sbit Input3 = P3^3;
u8 code KeyMap[4][4] = {{0, 1, 2, 19},
{3, 4, 5, 18},
{6, 7, 8, 17},
{9, 0x88, 0x99, 16}};
u8 KeyBuff[4][4] = {{0xff, 0xff, 0xff, 0xff}, {0xff, 0xff, 0xff, 0xff},
{0xff, 0xff, 0xff, 0xff}, {0xff, 0xff, 0xff, 0xff}};
u8 KeySta[4][4] = {{1, 1, 1, 1}, {1, 1, 1, 1}, {1, 1, 1, 1}, {1, 1, 1, 1}};
u8 KeyBackup[4][4] = {{1, 1, 1, 1}, {1, 1, 1, 1}, {1, 1, 1, 1}, {1, 1, 1, 1}};
void KeyScan(void)
{
static u8 index = 0;
u8 i, j;
KeyBuff[0][index] = (KeyBuff[0][index] << 1) | Input0; //第一行
KeyBuff[1][index] = (KeyBuff[1][index] << 1) | Input1; //第二行
KeyBuff[2][index] = (KeyBuff[2][index] << 1) | Input2; //第三行
KeyBuff[3][index] = (KeyBuff[3][index] << 1) | Input3; //第四行
index ++;
index &= 0x03;
switch(index)
{
case 0: Output3 = 1; Output0 = 0; break;
case 1: Output0 = 1; Output1 = 0; break;
case 2: Output1 = 1; Output2 = 0; break;
case 3: Output2 = 1; Output3 = 0; break;
}
for(i = 0; i < 4; i++)
{
for(j = 0; j < 4; j++)
{
if(KeyBuff[i][j] == 0x00) //按键按下
KeySta[i][j] = 0;
else if(KeyBuff[i][j] == 0xff) //按键松开
KeySta[i][j] = 1;
else //按键抖动
{}
}
}
}
void KeyAction(u8 keycode)
{
static u8 length = 0;
if((keycode >= 0) && (keycode <= 9) && (length < 4) && (flag_option == 1))
{
temper_range[length] = keycode;
length ++;
if(length >= 4)
{
length = 4;
temper_low = temper_range[3] + temper_range[2] * 10;
temper_high = temper_range[1] + temper_range[0] * 10;
if(temper_low > temper_high) //检测到错误
flag_right = 0;
}
}
else if((keycode == 0x88) && ((length == 0) || (length == 4)) && (temper_low <= temper_high))
{
flag_right = 1;
if(flag_option == 0)
{
flag_option = 1;
temp_backup[0] = temper_range[0];
temp_backup[1] = temper_range[1];
temp_backup[2] = temper_range[2];
temp_backup[3] = temper_range[3];
temper_range[0] = 16;
temper_range[1] = 16;
temper_range[2] = 16;
temper_range[3] = 16;
length = 0;
}
else if(flag_option == 1)
{
flag_option = 0;
temp_backup[0] = temper_range[0];
temp_backup[1] = temper_range[1];
temp_backup[2] = temper_range[2];
temp_backup[3] = temper_range[3];
}
}
else if((keycode == 0x99) && (flag_option == 1)) //清除键
{
length = 0;
temper_range[0] = 16;
temper_range[1] = 16;
temper_range[2] = 16;
temper_range[3] = 16;
}
}
void KeyPress(void)
{
u8 i, j;
for(i = 0; i < 4; i ++)
{
for(j = 0; j < 4; j ++)
{
if(KeyBackup[i][j] != KeySta[i][j])
{
if(KeySta[i][j] == 0)
KeyAction(KeyMap[i][j]);
KeyBackup[i][j] = KeySta[i][j];
}
}
}
}
ds18b20.c
#include "sys.h"
sbit DS18B20_IO = P1^4;
void Delayus(unsigned int us)
{
do{
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
}while(--us);
}
bit Get18B20Ack(void)
{
bit ack;
DS18B20_IO = 0; //产生500us的复位脉冲
Delayus(500);
EA = 0; //禁止定时器0中断
DS18B20_IO = 1; //延时60us
Delayus(60);
EA = 1; //重新使能总中断
ack = DS18B20_IO; //读取存在脉冲
while(!DS18B20_IO); //等待存在脉冲结束
return ack;
}
void DS18B20Write(unsigned char dat)
{
unsigned char mask;
for(mask = 0x01; mask != 0; mask <<= 1) //低位在先,依次移出8个bit
{
EA = 0;
DS18B20_IO = 0; //产生2us低电平脉冲
Delayus(2);
if(dat & mask) //输出该bit值
DS18B20_IO = 1;
else
DS18B20_IO = 0;
Delayus(60); //延时60us
DS18B20_IO = 1; //拉高通信引脚
EA = 1;
}
}
unsigned char DS18B20Read(void)
{
unsigned char mask, dat = 0;
for(mask = 0x01; mask != 0; mask <<= 1) //低位在先,依次采集8个bit
{
EA = 0;
DS18B20_IO = 0; //产生2us低电平脉冲
Delayus(2);
DS18B20_IO = 1; //结束低电平脉冲,等待18B20输出数据
Delayus(2); //延时2us
if(DS18B20_IO) //读取通信引脚上的值
dat |= mask;
Delayus(60); //再延时60us
EA = 1;
}
return dat;
}
bit Start18B20()
{
bit ack;
static bit flag = 1;
ack = Get18B20Ack(); //执行总线复位,并获取18B20应答
if(ack == 0) //如18B20正确应答,则启动一次转换
{
DS18B20Write(0xCC); //跳过ROM操作
if(flag)
{
flag = 0;
DS18B20Write(0x4e); //写暂存器指令4E
DS18B20Write(0x4b); //写高速缓存器TH高温限值75度
DS18B20Write(0x00); //写高速缓存器TL低温限值0度
DS18B20Write(0x1f); //写配置寄存器4
//0x1f : 0.5000°C 转换时间93.75ms
//0x3f : 0.2000°C 转换时间187.5ms
//0x5f : 0.1250°C 转换时间375ms
//0x7f : 0.0625°C 转换时间750ms
}
ack = Get18B20Ack(); //执行总线复位,并获取18B20应答
if(ack == 0) //如18B20正确应答,则启动一次转换
{
DS18B20Write(0xCC); //跳过ROM操作
DS18B20Write(0x44); //启动一次温度转换
}
}
return ~ack; //ack == 0 表示操作成功,所以返回值对其取反
}
bit Get18B20Temp(int *temp)
{
bit ack;
unsigned char LSB, MSB; //16bit温度值的低字节和高字节
ack = Get18B20Ack(); //执行总线复位,并获取18B20应答
if(ack == 0) //如18B20正确应答,则读取温度值
{
DS18B20Write(0xCC); //跳过ROM操作
DS18B20Write(0xBE); //发送读命令
LSB = DS18B20Read(); //读温度值的低字节
MSB = DS18B20Read(); //读温度值的高字节
*temp = ( MSB << 8) + LSB; //合成16bit的整数
}
return ~ack; //ack == 0 表示操作应答,所以返回值为1其取反值
}
ds18b20.h
#ifndef __DS18B20_H
#define __DS18B20_H
//单总线延时函数
void Delayus(unsigned int us);
bit Get18B20Ack(void);
void DS18B20Write(unsigned char dat);
unsigned char DS18B20Read(void);
bit Start18B20();
bit Get18B20Temp(int *temp);
#endif