《reinforcement learning:an introduction》第七章《Multi-step Bootstrapping》总结
由于组里新同学进来,需要带着他入门RL,选择从silver的课程开始。
对于我自己,增加一个仔细阅读《reinforcement learning:an introduction》的要求。
因为之前读的不太认真,这一次希望可以认真一点,将对应的知识点也做一个简单总结。
7.1 n-step TD Prediction
The methods that use n-step backups are still TD methods because theystill change an earlier estimate based on how it differs from a later estimate.
n-step return:
![]()
If t +n ≥ T(if the n-step return extends to or beyond termination), then all the missing terms are taken as zero ==》这个很容易理解,最后n步之内,还剩多少步就令return等于所有剩余步数的reward和。相应的,前n-1步也是没有任何更新过程,Note that no changes at all are made during the first n- 1 steps of each episode.。
n-step return的error往往更小:

Methods that involve an intermediate amount of bootstrapping are important because they will typically perform better than either extreme.
7.2 n-step SARSA
将V改成Q即可,整个流程基本一致:

想一下为什么n-step的方法能更有效地更新Q-table:因为每一个好的(s,a)或坏的(s,a)在更新过程中都会被使用n次(看上面伪代码),这样可以有效的backup到n-step之前的相关(s,a)。

7.3 n-step Off-policy Learning by Importance Sampling
The importance sampling that we have used in this section and in Chapter 5 enables off-policy learning, but at the cost of increasing the variance of the updates. The high variance forces us to use a small step-size parameter, resulting in slow learning. It is probably inevitable that off-policy training is slower than on-policy training|after all, the data is less relevant to what you are trying to learn.
7.4 Off-policy Learning Without Importance Sampling: Then-step Tree Backup Algorithm
7.3/7.4在实际中很少用吧,跳过去了。其中12章的eligibility traces应该是n-step方法部分应该掌握的重点。
silver课程的lecture 4中30页之后的内容、lecture 5中26-30页关于n-step algorithm以及eligibility trace的介绍非常简单明了。
forward-view TD(λ):


backward-view TD(λ):
Forward view provides theory
Backward view provides mechanism
Update online, every step, from incomplete sequences 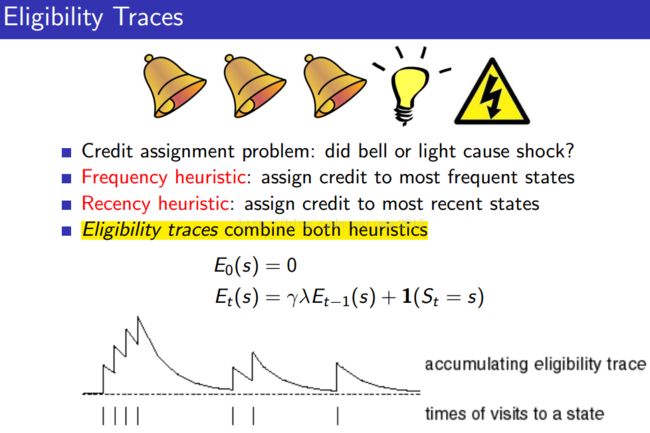

λ=0,TD(λ)就是之前提到的TD(0)方法;λ=1,forward-view TD(λ)就是之前提到的MC方法,backward-view 的online TD(λ)近似是之前提到的MC方法。
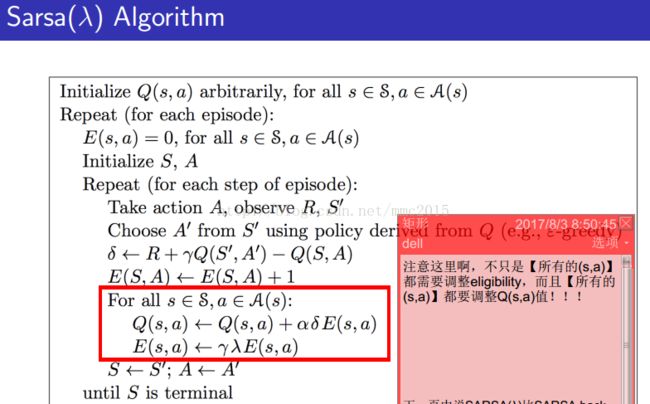
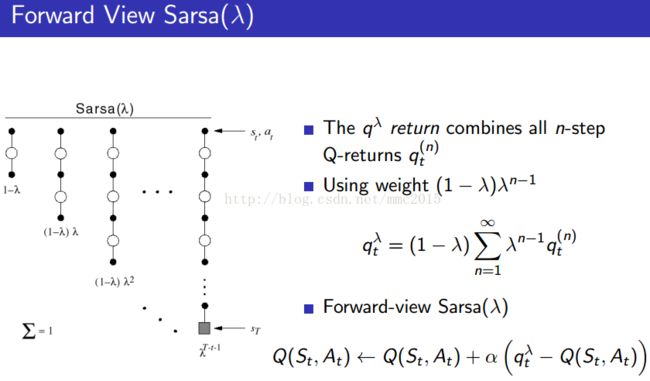
forward-view SARSA(λ):
backward-view SARSA(λ):