Linux设备树详解(四)kernel的解析
uboot将一些参数,设备树文件传给内核,那么内核如何处理这些设备树文件呢?本章就kernel解析设备树的过程和原理,本章的主要内容以Device Tree相关的数据流分析为索引,对ARM linux kernel的代码进行解析。主要的数据流包括:
- 设备树对于内核的意义
- 从u-boot传递dtb开始,kernel初始化流程,如何将dtb并将其转换成Device Tree Structure
- 传递运行时参数传递以及platform的识别流程分析
- 如何将Device Tree Structure并入linux kernel的设备驱动模型。
1. 设备树的作用
由前面几章已经大致可以得出设备树对于内核的作用
| 作用 | 详细描述 |
|---|---|
| 平台标识 | 告诉内核dtb支持哪些平台 ; 用DT 来标识特定的machine ; root 节点的compatible 字段,匹配machine_desc的dt_compat |
| 运行时配置 | chosen节点的属性 |
| 设备信息集合 | 传递各种设备信息 |
2. 初始化流程
从上一章我们已经知道fdt的地址是作为参数传递到kernel。下面看一下kernel阶段怎么获取这个地址值的。bootloader启动内核时,会设置r0,r1,r2三个寄存器,
r0一般设置为0;
r1一般设置为machine id (在使用设备树时该参数没有被使用);
r2一般设置ATAGS或DTB的开始地址;
对于启动的流程代码如下:
ENTRY(stext)
ARM_BE8(setend be ) @ ensure we are in BE8 mode
THUMB( adr r9, BSYM(1f) ) @ Kernel is always entered in ARM.
THUMB( bx r9 ) @ If this is a Thumb-2 kernel,
THUMB( .thumb ) @ switch to Thumb now.
THUMB(1: )
#ifdef CONFIG_ARM_VIRT_EXT
bl __hyp_stub_install
#endif
@ ensure svc mode and all interrupts masked
safe_svcmode_maskall r9
mrc p15, 0, r9, c0, c0 @ get processor id
bl __lookup_processor_type @ r5=procinfo r9=cpuid
movs r10, r5 @ invalid processor (r5=0)?
THUMB( it eq ) @ force fixup-able long branch encoding
beq __error_p @ yes, error 'p'
#ifdef CONFIG_ARM_LPAE
mrc p15, 0, r3, c0, c1, 4 @ read ID_MMFR0
and r3, r3, #0xf @ extract VMSA support
cmp r3, #5 @ long-descriptor translation table format?
THUMB( it lo ) @ force fixup-able long branch encoding
blo __error_lpae @ only classic page table format
#endif
#ifndef CONFIG_XIP_KERNEL
adr r3, 2f
ldmia r3, {r4, r8}
sub r4, r3, r4 @ (PHYS_OFFSET - PAGE_OFFSET)
add r8, r8, r4 @ PHYS_OFFSET
#else
ldr r8, =PLAT_PHYS_OFFSET @ always constant in this case
#endif
/*
* r1 = machine no, r2 = atags or dtb,
* r8 = phys_offset, r9 = cpuid, r10 = procinfo
*/
bl __vet_atags
#ifdef CONFIG_SMP_ON_UP
bl __fixup_smp
#endif
#ifdef CONFIG_ARM_PATCH_PHYS_VIRT
bl __fixup_pv_table
#endif
bl __create_page_tables
/*
* The following calls CPU specific code in a position independent
* manner. See arch/arm/mm/proc-*.S for details. r10 = base of
* xxx_proc_info structure selected by __lookup_processor_type
* above. On return, the CPU will be ready for the MMU to be
* turned on, and r0 will hold the CPU control register value.
*/
ldr r13, =__mmap_switched @ address to jump to after
@ mmu has been enabled
adr lr, BSYM(1f) @ return (PIC) address
mov r8, r4 @ set TTBR1 to swapper_pg_dir
ARM( add pc, r10, #PROCINFO_INITFUNC )
THUMB( add r12, r10, #PROCINFO_INITFUNC )
THUMB( ret r12 )
1: b __enable_mmu
ENDPROC(stext)
.ltorg
#ifndef CONFIG_XIP_KERNEL
2: .long .
.long PAGE_OFFSET
#endif
- __lookup_processor_type : 使用汇编指令读取CPU ID, 根据该ID找到对应的proc_info_list结构体(里面含有这类CPU的初始化函数、信息)
- __vet_atags : 判断是否存在可用的ATAGS或DTB
在汇编的阶段,大概可以看出来用变量__atags_pointer指向FDT的首地址,执行完汇编的阶段就会调到C代码的流程里面了
3. 平台信息的处理(machine_desc)
进入到start_kernel的处理流程中
asmlinkage void __init start_kernel(void)
{
...
setup_arch(&command_line); //设置架构相关的内容
...
}由于涉及的知识点内容实在太多,那么我们只是重点的关注fdt的处理,直接进到setup_ arch()函数。
void __init setup_arch(char **cmdline_p)
{
...
mdesc = setup_machine_fdt(__atags_pointer);
if (!mdesc)
mdesc = setup_machine_tags(__atags_pointer, __machine_arch_type);
machine_desc = mdesc;
machine_name = mdesc->name;
...
}首先通过set_machine_fdt来set_machine描述符,如果返回值是NULL,那么就采用传统的方式,如果u-boot传递了,就采用设备树方式
- 传统方式:对于如何确定mdesc,旧的方法是静态定义若干的machine描述符(struct machine_desc),在系统启动的时候,通过machine type ID作为索引,在这些静态定义的machine描述符中,找到对应哪个ID匹配的描述符。
- 设备树:通过__atags_pointer来找到对应的machine_desc设备描述符
首先我们来看看struct machine_desc的定义方式:
struct machine_desc {
...
unsigned int nr; /* architecture number */
const char *name; /* architecture name */
unsigned long atag_offset; /* tagged list (relative) */
const char *const *dt_compat; /* array of device tree
...
}nr成员就是过去使用的machine type ID。内核machine描述符的table有若干个entry,每个都有自己的ID。bootloader传递了machine type ID,指明使用哪一个machine描述符。而dtb方式中目前匹配machine描述符使用compatible strings,也就是dt_compat成员,这是一个string list,定义了这个machine所支持的列表。
const struct machine_desc * __init setup_machine_fdt(unsigned int dt_phys)
{
const struct machine_desc *mdesc, *mdesc_best = NULL;
if (!dt_phys || !early_init_dt_verify(phys_to_virt(dt_phys)))
return NULL;
mdesc = of_flat_dt_match_machine(mdesc_best, arch_get_next_mach);
if (!mdesc) {
const char *prop;
int size;
unsigned long dt_root;
early_print("\nError: unrecognized/unsupported "
"device tree compatible list:\n[ ");
dt_root = of_get_flat_dt_root();
prop = of_get_flat_dt_prop(dt_root, "compatible", &size);
while (size > 0) {
early_print("'%s' ", prop);
size -= strlen(prop) + 1;
prop += strlen(prop) + 1;
}
early_print("]\n\n");
dump_machine_table(); /* does not return */
}
/* We really don't want to do this, but sometimes firmware provides buggy data */
if (mdesc->dt_fixup)
mdesc->dt_fixup();
early_init_dt_scan_nodes();
/* Change machine number to match the mdesc we're using */
__machine_arch_type = mdesc->nr;
return mdesc;
}setup_machine_fdt函数的功能就是根据Device Tree的信息,找到最适合的machine描述符。其主要做了下面几件事情
- 传进来的fdt地址是物理地址,所以用phys_to_virt()函数转换为虚拟地址,同时进行合法检测
- 在machine描述符的列表中scan,找到最合适的那个machine描述符。和传统的方法类似,也是静态定义的。DT_MACHINE_START和MACHINE_END用来定义一个machine描述符。编译的时候,compiler会把这些machine descriptor放到一个特殊的段中(.arch.info.init),形成machine描述符的列表。
- of_get_flat_dt_prop(dt_root, “compatible”, &size)使用compatile属性的值, 跟’’‘每一个machine_desc.dt_compat’’'比较,
成绩为"吻合的compatile属性值的位置",成绩越低越匹配, 对应的machine_desc即被选中
static const void * __init arch_get_next_mach(const char *const **match)
{
static const struct machine_desc *mdesc = __arch_info_begin;
const struct machine_desc *m = mdesc;
if (m >= __arch_info_end)
return NULL;
mdesc++;
*match = m->dt_compat;
return m;
}_arch_info_begin指向machine描述符列表第一个entry。通过mdesc++不断的移动machine描述符指针(Note:mdesc是static的)。match返回了该machine描述符的compatible string list。具体匹配的算法倒是很简单,就是比较字符串而已,最终找到对应的machine type。 从该流程可以知道,内核是可以支持很多种不同类型的设备,只要在bootloader传递的时候,传递对应不同的dtb表即可。
4. 运行时参数传递
设备树只是起一个信息传递的作用,对这些信息配置的处理,也比较简单,即从设备树的DTB文件中,把这些设备信息提取出来赋给内核中的某个变量即可。那么在系统初始化的过程中,我们需要将DTB转换成节点是device_node的树状结构,以便后续方便操作。紧接上章的函数继续分析
void __init early_init_dt_scan_nodes(void)
{
/* Retrieve various information from the /chosen node */
of_scan_flat_dt(early_init_dt_scan_chosen, boot_command_line);
/* Initialize {size,address}-cells info */
of_scan_flat_dt(early_init_dt_scan_root, NULL);
/* Setup memory, calling early_init_dt_add_memory_arch */
of_scan_flat_dt(early_init_dt_scan_memory, NULL);
}该函数主要完成3个工作:
- 扫描 /chosen node,保存运行时参数(bootargs)到boot_command_line,此外,还通过early_init_dt_check_for_initrd处理initrd相关的property,并保存在initrd_start和initrd_end这两个全局变量中 。其中主要是解析dts的配置为
chosen {
bootargs = "earlycon=sprd_serial,0x70100000,115200n8 loglevel=8 console=ttyS1,115200n8 init=/init root=/dev/ram0 rw androidboot.hardware=sc9830";
linux,initrd-start = <0x85500000>;
linux,initrd-end = <0x855a3212>;
};bootargs属性就是内核启动的命令行参数,它里面可以指定根文件系统在哪里,第一个运行的应用程序是哪一个,指定内核的打印信息从哪个设备里打印出来
- 扫描根节点,获取 {size,address}-cells信息,并保存在dt_root_size_cells和dt_root_addr_cells全局变量中 ,memory中的reg属性的地址是32位还是64位,大小是用一个32位表示,还是两个32位表示
- 扫描DTB中的memory node,并把相关信息保存在meminfo中,全局变量meminfo通过memblock_add保存了系统内存相关的信息
5. dtb解析成device node
uboot把设备树DTB文件随便放到内存的某一个地方就可以使用,为什么内核运行中,他不会去覆盖DTB所占用的那块内存呢?在设备树文件中,可以使用/memreserve/指定一块内存,这块内存就是保留的内存,内核不会占用它。即使你没有指定这块内存,当我们内核启动时,他也会把设备树所占用的区域保留下来。内核在arm_memblock_init中会使用early_init_fdt_scan_reserved_mem来配置fdt的内存,通知也回对memreserve指定内存进行保留操作。
void __init early_init_fdt_scan_reserved_mem(void)
{
int n;
u64 base, size;
if (!initial_boot_params)
return;
/* Reserve the dtb region */
early_init_dt_reserve_memory_arch(__pa(initial_boot_params),
fdt_totalsize(initial_boot_params),
0);
/* Process header /memreserve/ fields */
for (n = 0; ; n++) {
fdt_get_mem_rsv(initial_boot_params, n, &base, &size);
if (!size)
break;
early_init_dt_reserve_memory_arch(base, size, 0);
}
of_scan_flat_dt(__fdt_scan_reserved_mem, NULL);
fdt_init_reserved_mem();
}- initial_boot_params实际上是dtb的虚拟地址,在early_init_dt_verify初始化的时候设定,首先进来就判断dtb是否存在,如果存在就将dtb的空间进行保留
- 对fdt中的每一个节点调用__fdt_scan_reserved_mem函数,进行reserved-memory节点的扫描,之后调用fdt_init_reserved_mem函数进行内存预留的动作
说完了dtb对于内存的流程,那么来到这节的重点,dtb解析成device node,首先来看看下面的代码
void __init unflatten_device_tree(void)
{
__unflatten_device_tree(initial_boot_params, &of_allnodes,
early_init_dt_alloc_memory_arch);
/* Get pointer to "/chosen" and "/aliases" nodes for use everywhere */
of_alias_scan(early_init_dt_alloc_memory_arch);
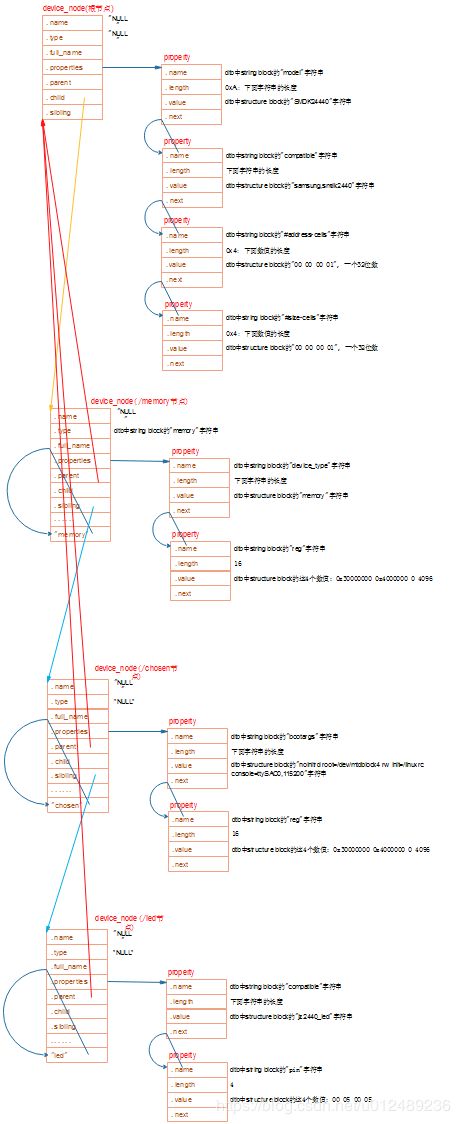
}分析以上代码,在unflatten_device_tree()中,调用函数__unflatten_device_tree(),参数initial_boot_params指向Device Tree在内存中的首地址,of_root在经过该函数处理之后,会指向根节点,early_init_dt_alloc_memory_arch是一个函数指针,为struct device_node和struct property结构体分配内存的回调函数(callback)。在__unflatten_device_tree()函数中,两次调用unflatten_dt_node()函数,第一次是为了得到Device Tree转换成struct device_node和struct property结构体需要分配的内存大小,第二次调用才是具体填充每一个struct device_node和struct property结构体。那么Device Tree中的每一个node节点经过kernel处理都会生成一个struct device_node的结构体,struct device_node最终一般会被挂接到具体的struct device结构体。struct device_node结构体描述如下:
struct device_node {
const char *name; //device node name
const char *type; //对应device_type的属性
phandle phandle; //对应该节点的phandle属性
const char *full_name; //从“/”开始的,表示该node的full path
struct property *properties; //该节点的属性列表
struct property *deadprops; //如果需要删除某些属性,kernel并非真的删除,而是挂入到deadprops的列表
struct device_node *parent; //parent、child以及sibling将所有的device node连接起来
struct device_node *child;
struct device_node *sibling;
struct device_node *next; //通过该指针可以获取相同类型的下一个node
struct device_node *allnext; //通过该指针可以获取node global list下一个node
struct kobject kobj;
unsigned long _flags;
void *data;
#if defined(CONFIG_SPARC)
const char *path_component_name;
unsigned int unique_id;
struct of_irq_controller *irq_trans;
#endif
}对于dtb最后都存储在,其结构图如下
6. linux kernel的设备驱动模型
在linux kernel引入统一设备模型之后,bus、driver和device形成了设备模型中的铁三角。在驱动初始化的时候会将代表该driver的一个数据结构挂入bus上的driver链表,device的数据结构挂入bus上的devie链表,那么如何让device遇到“对”的那个driver呢?那么就要靠缘分了,也就是bus的match函数来完成。在传统的方式中,代码中会定义一个static struct platform_device *xxx_devices的静态数组,在初始化的时候调用platform_add_devices。这些静态定义的platform_device往往又需要静态定义各种resource,那么对于设备树,也就是需要根据device_node的树状结构(root是of_allnodes)将一个个的device node挂入到相应的总线device链表中即可。
static int __init customize_machine(void)
{
/*
* customizes platform devices, or adds new ones
* On DT based machines, we fall back to populating the
* machine from the device tree, if no callback is provided,
* otherwise we would always need an init_machine callback.
*/
if (machine_desc->init_machine)
machine_desc->init_machine();
#ifdef CONFIG_OF
else
of_platform_populate(NULL, of_default_bus_match_table,
NULL, NULL);
#endif
return 0;
}那么Linux系统是怎么知道哪些device node要注册为platform_device,哪些是用于i2c_client,哪些是用于spi_device?不知道你有没有注意到调用of_platform_populate的时候给它传递了一个参数of_default_bus_match_table
const struct of_device_id of_default_bus_match_table[] = {
{ .compatible = "simple-bus", },
#ifdef CONFIG_ARM_AMBA
{ .compatible = "arm,amba-bus", },
#endif /* CONFIG_ARM_AMBA */
{} /* Empty terminated list */
};那么在dts文件会也会对对应的驱动进行配置
ap-apb {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
ranges;
uart0: serial@70000000 {
compatible = "sprd,sc9836-uart";
reg = <0x70000000 0x100>;
interrupts = ;
clock-names = "uart", "source","enable";
clocks = <&clk_uart0>, <&ext_26m>,
<&clk_ap_apb_gates 13>;
status = "disabled";
};
}
如果某个device node的compatible属性的值与数组of_default_bus_match_table中的任意一个元素的compatible的值match,那么这个device node的child device node(device_node的child成员变量指向的是这个device node的子节点,也是一个链表)仍旧会被注册为platform_device。下面来看看重点的解析过程
int of_platform_populate(struct device_node *root,
const struct of_device_id *matches,
const struct of_dev_auxdata *lookup,
struct device *parent)
{
struct device_node *child;
int rc = 0;
root = root ? of_node_get(root) : of_find_node_by_path("/");
if (!root)
return -EINVAL;
for_each_child_of_node(root, child) {
rc = of_platform_bus_create(child, matches, lookup, parent, true);
if (rc)
break;
}
of_node_put(root);
return rc;
}该函数主要完成完成:
- 获取根节点,如果传递进来的参数root为NULL,那么需要通过of_find_node_by_path函数找到device tree中的根节点。
- 得到根节点之后,就可以通过这个根节点来遍历device tree中的节点了。得到一个子节点之后,调用of_platform_bus_create函数为每一个节点创建platform_device结构体
static int of_platform_bus_create(struct device_node *bus,
const struct of_device_id *matches,
const struct of_dev_auxdata *lookup,
struct device *parent, bool strict)
{
const struct of_dev_auxdata *auxdata;
struct device_node *child;
struct platform_device *dev;
const char *bus_id = NULL;
void *platform_data = NULL;
int rc = 0;
/* Make sure it has a compatible property */
if (strict && (!of_get_property(bus, "compatible", NULL))) {
pr_debug("%s() - skipping %s, no compatible prop\n",
__func__, bus->full_name);
return 0;
}
auxdata = of_dev_lookup(lookup, bus);
if (auxdata) {
bus_id = auxdata->name;
platform_data = auxdata->platform_data;
}
if (of_device_is_compatible(bus, "arm,primecell")) {
/*
* Don't return an error here to keep compatibility with older
* device tree files.
*/
of_amba_device_create(bus, bus_id, platform_data, parent);
return 0;
}
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent);
if (!dev || !of_match_node(matches, bus))
return 0;
for_each_child_of_node(bus, child) {
pr_debug(" create child: %s\n", child->full_name);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict);
if (rc) {
of_node_put(child);
break;
}
}
of_node_set_flag(bus, OF_POPULATED_BUS);
return rc;
}
- 需要确定节点是否有"compatible"属性,如果没有"compatible"属性,则直接返回,即不会创建platform设备的。
- 如果"compatible"属性值有"arm,primecell",则会调用of_amba_device_create函数去创建amba_device,它设计了AMBA的总线来连接SOC内的各个block。符合这个总线标准的SOC上的外设叫做ARM Primecell Peripherals
- 如果不是ARM Primecell Peripherals,那么我们就需要向platform bus上增加一个platform device了,of_platform_device_create_pdata才是真正的platform_device
- 一个device node可能是一个桥设备,因此要重复调用of_platform_bus_create来把所有的device node处理掉
static struct platform_device *of_platform_device_create_pdata(
struct device_node *np,
const char *bus_id,
void *platform_data,
struct device *parent)
{
struct platform_device *dev;
if (!of_device_is_available(np) ||
of_node_test_and_set_flag(np, OF_POPULATED))
return NULL;
dev = of_device_alloc(np, bus_id, parent);
if (!dev)
goto err_clear_flag;
of_dma_configure(&dev->dev);
dev->dev.bus = &platform_bus_type;
dev->dev.platform_data = platform_data;
/* We do not fill the DMA ops for platform devices by default.
* This is currently the responsibility of the platform code
* to do such, possibly using a device notifier
*/
if (of_device_add(dev) != 0) {
platform_device_put(dev);
goto err_clear_flag;
}
return dev;
err_clear_flag:
of_node_clear_flag(np, OF_POPULATED);
return NULL;
}
- of_device_is_available函数,这个函数主要是用于检测"status"属性的,如果没有"status"属性,那还好说直接返回true。如果有"status"属性,而它的值又不是"okay"或"ok",那么不好意思,返回false,否则还是返回true。所以"status"属性就是用来检测是否可用,是否需要创建platform_node
- of_device_alloc除了分配struct platform_device的内存,还分配了该platform device需要的resource的内存。当然,这就需要解析该device node的interrupt资源以及memory address资源。
- 回到of_platform_device_create_pdata函数中,平台设备已经申请好了,然后对平台设备继续进行赋值操作,例如平台设备的总线赋值为平台总线,平台设备的私有数据赋值为platform_data,最终会调用of_device_add函数将平台设备注册到内核中。
也就是说当of_platform_populate()函数执行完毕,kernel就为DTB中所有包含compatible属性名的第一级node创建platform_device结构体,并向平台设备总线注册设备信息。如果第一级node的compatible属性值等于“simple-bus”、“simple-mfd”或者"arm,amba-bus"的话,kernel会继续为当前node的第二级包含compatible属性的node创建platform_device结构体,并注册设备。Linux系统下的设备大多都是挂载在平台总线下的,因此在平台总线被注册后,会根据of_root节点的树结构,去寻找该总线的子节点,所有的子节点将被作为设备注册到该总线上。
7 参考文档
http://www.wowotech.net/device_model/dt-code-analysis.html
https://blog.csdn.net/thisway_diy/article/details/84336817