【文献阅读】Feature Denoising for Improving Adversarial Robustness
论文网址:https://arxiv.org/abs/1812.03411
国内镜像:https://xxx.itp.ac.cn/abs/1812.03411
这篇主要解决的是对抗攻击中出现的问题。没有好好研究对抗攻击中具体的算法,就大概知道是怎么回事。
- 对抗攻击:通过对输入添加微小的扰动使得分类器分类错误,一般对用于深度学习的网络的攻击算法最为常见,应用场景包括目前大热的CV和NLP方向,例如,通过对图片添加精心准备的扰动噪声使得分类器分错,或者通过对一个句子中的某些词进行同义词替换使得情感分类错误。
对抗攻击有很多种类,从攻击环境来说,可以分为黑盒攻击,白盒攻击或者灰盒攻击。
- 黑盒攻击:攻击者对攻击的模型的内部结构,训练参数,防御方法(如果加入了防御手段的话)等等一无所知,只能通过输出输出与模型进行交互。
- 白盒攻击:与黑盒模型相反,攻击者对模型一切都可以掌握。目前大多数攻击算法都是白盒攻击。
- 灰盒攻击:介于黑盒攻击和白盒攻击之间,仅仅了解模型的一部分。(例如仅仅拿到模型的输出概率,或者只知道模型结构,但不知道参数)
从攻击的目的来说,可以分为有目标攻击和无目标攻击。
- 无目标攻击:以图片分类为例,攻击者只需要让目标模型对样本分类错误即可,但并不指定分类错成哪一类。
- 有目标攻击:攻击者指定某一类,使得目标模型不仅对样本分类错误并且需要错成指定的类别。从难度上来说,有目标攻击的实现要难于无目标攻击。
从扰动的强度大小来说,可以分为无穷范数攻击,二范数攻击和0范数攻击(下列公式中的x表示的是扰动大小)。
∥ x ∥ p = ( ∑ i = 1 n ∣ x i ∣ p ) 1 p \lVert x \rVert _{p} =\lparen \displaystyle\sum_{i=1}^n |x _{i}| ^p \rparen ^\frac 1 p ∥x∥p=(i=1∑n∣xi∣p)p1
- 无穷范数攻击:当p趋近于无穷大时,上式子表示扰动中最大的一个,通常在论文里,对于MNIST数据集,限制是(-0.3,0.3)。
- 二范数攻击:p=2
- 0范数攻击(单像素攻击):此时限制的是可以改变的像素个数,不关心具体每个像素值改变了多少。在MNIST数据集中,一般限制是12个。
从攻击的实现来说来说,可以分为基于梯度的攻击,基于优化的攻击,基于决策面的攻击或者其他。
- 基于梯度的攻击:FGSM(Fast Gradient Sign Method)、PGD(Project Gradient Descent)、MIM(Momentum Iterative Method)
- 基于优化的攻击:CW(Carlini-Wagner Attack)
- 基于决策面的攻击:DEEPFOOL
- 其他:Pointwise
这篇文章主要使用的方法是:
用了非局部均值或其他滤波方法对特征图进行降噪
主要贡献结果是:
在ImageNet上,经过10轮的PGD白盒攻击,最先进的算法只有27.9%的正确率,而我们的方法达到了55.7%;经过2000轮的PGD白盒攻击,依旧有42.6%的正确率
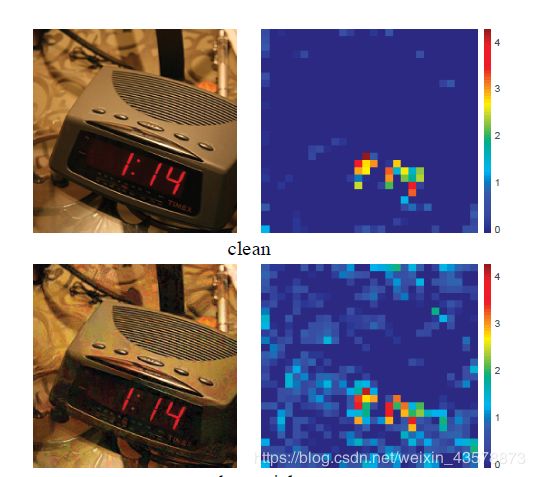
首先是作者的出发点,观察对抗攻击中生成的“脏”图的特征图以及他本身,可以发现对抗扰动虽然在像素空间中很小,但是会导致网络的特征图中出现大量的“噪声”。
这些干扰要么被认为是人类察觉不到的,要么被认为是不会妨碍人类识别视觉内容的噪音。
自然而然就会想到对特征图进行降噪,而作者的消融实验表明,使用非局部均值滤波、均值滤波、中值滤波和双边滤波进行特征去噪提高了对抗的鲁棒性,表明特征去噪是一个很好的设计原则。
下图是一个普适的特征图去噪模块:
对应着有四种实例化方式:
1.Non-local means
y i = 1 C ( x ) ∑ ∀ j ∈ λ f ( x i , x j ) ⋅ x j y _{i} = \frac{1}{C(x)} \sum_{\forall j \in \lambda} f(x_{i}, x_{j}) \cdot x_{j} yi=C(x)1∀j∈λ∑f(xi,xj)⋅xj
2.Bilateral filter
y i = 1 C ( x ) ∑ ∀ j ∈ Ω ( x ) f ( x i , x j ) ⋅ x j y_{i} = \frac{1}{C(x)} \sum_{\forall j \in \Omega(x)} f(x_{i}, x_{j}) \cdot x_{j} yi=C(x)1∀j∈Ω(x)∑f(xi,xj)⋅xj
双边滤波与非局部均值滤波唯一的不同在于j的取值范围 Ω j \Omega j Ωj
是一个局部区域(例如3 * 3的patch)。
3.Mean filter
最简单的去噪方法,也可以当作步长为1的平均池化。
4.Median filter
y i = m e d i a n { ∀ j ∈ Ω ( i ) : x j } y_{i} = median \{ \forall j \in \Omega (i) : x_{j} \} yi=median{∀j∈Ω(i):xj}
其中
f ( x i , x j ) f(x_{i}, x_{j}) f(xi,xj)
也对应着两种方法:
1.Gaussian(softmax)
f ( x i , x j ) = e 1 d θ ( x i ) T ϕ ( x j ) T f(x_{i}, x_{j}) = e ^{\frac{1}{\sqrt d} \theta (x_{i}) ^T \phi (x_{j}) ^T } f(xi,xj)=ed1θ(xi)Tϕ(xj)T
C = ∑ ∀ j ∈ λ f ( x i , x j ) C = \textstyle\sum_{\forall j \in \lambda } f(x_{i}, x_{j}) C=∑∀j∈λf(xi,xj)
其中,d是通道的数量。
2.Dot product
f ( x i , x j ) = x i T x j f(x_{i}, x_{j}) = x_{i} ^T x_{j} f(xi,xj)=xiTxj
C = N C = N C=N
其中,N是总像素数。