Faiss向量召回引擎如何做到快速查找最近邻
Faiss向量召回引擎的索引结构
- 背景
- 问题描述
- 问题规模
- 最近邻离线表
- 向量量化(Vector Quantization)
- 乘积量化PQ(Product Quantization)
- Quantization场景下的距离计算
- SDC
- ADC
- IVFADC
- 粗糙量化(coarse quantization)+残差量化
- 索引结构
- 索引过程
- 搜索过程
- 实验效果
- 优化
- 总结
欢迎来我的小站转转~~
背景
Faiss是Facebook开源的向量召回引擎,用于寻找与某个向量最相似的N个向量。

Faiss第一次release发布于2018.02.23,但其作者Matthijs在加入Facebook之前的2011年就已经发表了一篇关于最近邻搜索的论文,Faiss就是基于此论文思想实现的。读懂了这篇论文,Faiss的索引方式就清楚了。
问题描述
给定D维向量 x x x和集合 Γ = y 1 , y 2 … y N \Gamma = y_1,y_2 … y_N Γ=y1,y2…yN ,需要找到与 x x x距离最短的k个最近邻。
以欧氏距离为例,可表示为:
L = k − a r g m i n i = 0 : N ∣ ∣ x − y i ∣ ∣ L = k-argmin_{i=0:N}|| x-y_i || L=k−argmini=0:N∣∣x−yi∣∣
在我们的应用中, x ∈ Γ x \in \Gamma x∈Γ
问题规模
我们试着以最粗暴的方法进行穷举搜索,来看一下这个解的复杂度有多高。

- 构造距离矩阵:每两个向量 x x x与 y y y的距离计算公式为 Σ ( x i − y i ) 2 , i ∈ [ 1 , D ] \sqrt{\Sigma{(x_i-y_i)^2}}, i\in [1,D] Σ(xi−yi)2,i∈[1,D] ,耗费时间为 O ( D ) O(D) O(D) , 距离矩阵包含 N 2 N^2 N2 个元素,总共耗时为 O ( D ∗ N 2 ) O(D*N^2) O(D∗N2)
- 从距离矩阵中查找到k个最近邻,若用最小堆算法,时间复杂度为 O ( ( N − k ) l o g k ) O((N-k)logk) O((N−k)logk)
取 N = 2000 W , k = 1000 , D = 1000 N=2000W, k=1000,D=1000 N=2000W,k=1000,D=1000
得到
- 距离矩阵包含400T个元素,假设每个距离为float占用32bit,至少占用1600TB空间
- 构造距离矩阵运算时间复杂度数量级为 1 0 17 10^{17} 1017
- 从距离矩阵中找到k个最近邻的时间复杂度数量级为 1 0 9 10^9 109

最近邻离线表
一般来说向量集合都是每天更新的,这时候可以试着直接把每个向量对应的k个最近邻保存起来

- 构造距离矩阵+N个k近邻查找耗时为 O ( D N 2 + N ∗ ( N − k ) ∗ l o g k ) O(DN^2 + N*(N-k)*logk) O(DN2+N∗(N−k)∗logk)
- 构造最近邻离线表空间占用 N ∗ k N*k N∗k
在我们的场景中得到
- 找到N个k近邻查找的耗时数量级为 1 0 17 10^{17} 1017
- 存储空间为 1600 T B 1600TB 1600TB (构造后删除)+320G(假设每个索引用int表示,分数用float表示)
查找k最近邻的耗时: O(1)
向量量化(Vector Quantization)
在我们的场景中,其实不需要最精确的距离,允许一定程度的误差。在这种情况下,我们可以引入向量量化方法,将向量的数量大幅度缩小。
所谓向量量化,就是将原来无限的空间 R D R^D RD 映射到一个有限的向量集合 C = { c i , i ∈ [ 1 , l ] } \mathcal{C} = \{c_i, i\in[1,l]\} C={ci,i∈[1,l]} 中,其中 l l l 是一个自然数。将这个从 R D R^D RD 到集合 C \mathcal{C} C 的函数记为 q q q ,则 ∀ q ( y ) ∈ C \forall q(y) \in \mathcal{C} ∀q(y)∈C,在信息论中称 C \mathcal{C} C 为codebook。
当然这里的映射函数也不是随便指定的,需要满足误差最小的原则,一种方法是将优化函数设置为最小平方误差 M S E ( q ) = E X [ d ( q ( y ) , y ) 2 ] MSE(q)=\mathbb{E}_X[d(q(y),y)^2] MSE(q)=EX[d(q(y),y)2]
咦,正好就是k-means方法的目标函数!因此我们可以用k-means作为寻找最佳codebook的方法。
那现在我们来分析一下进行向量量化占用的空间和时间复杂度
假设我们将原来2000W个向量映射到大小为20W的集合中(平均每个中心点代表100个向量,已经引入了较大的误差)
- 距离矩阵:只需要存储对应 C \mathcal{C} C 中向量之间的距离,占用的空间为 ∣ ∣ C ∣ ∣ 2 || \mathcal{C} ||^2 ∣∣C∣∣2,此例中为 400 G × 4 B = 1.6 T 400G \times 4B=1.6T 400G×4B=1.6T
- y → c ∈ C y \to c \in \mathcal{C} y→c∈C的映射关系,若以int标识一个向量,则共约 N × 4 = 80 M N \times 4=80M N×4=80M内存
- 时间复杂度:k-means算法的时间复杂度为 O ( m i t e r N k D ) O(m_{iter}NkD) O(miterNkD),其中 m i t e r m_{iter} miter为迭代次数,N为原空间向量数量,k为中心点数量,D为向量维度。在此例中时间复杂度为 4 m ∗ 1 0 15 4m*10^{15} 4m∗1015,取迭代次数为25就已经达到了暴力搜索的数量级,只要迭代次数稍微上升些,时间复杂度还会更高。
乘积量化PQ(Product Quantization)
很多时候我们向量不同部分之间的分布是不同的

那么就可以将向量分成 m m m个不同的部分,对每个部分进行向量量化,假设平均划分,则每个部分的维度大小为 D ∗ = D / m D^*=D/m D∗=D/m
一个向量 [ x 1 , x 2 , … , x D ∗ , … , x D − D ∗ + 1 , … , x D ] [x_1,x_2,…,x_{D^*},…,x_{D-D^*+1},…,x_D] [x1,x2,…,xD∗,…,xD−D∗+1,…,xD] ,可以划分为m组向量 [ x i _ 1 , x i _ 2 , … , x i _ D ∗ ] [x_{i\_1},x_{i\_2},…,x_{i\_D^*}] [xi_1,xi_2,…,xi_D∗],每组的codebook为 C i \mathcal{C_i} Ci,对应的量化器记为 q i q_i qi, ∀ q i ( x i ∗ ) ∈ C i \forall q_i(x_{i*}) \in \mathcal{C_i} ∀qi(xi∗)∈Ci。则最终的全局codebook就是 C = C 1 ∗ C 2 . . . ∗ C m \mathcal{C} = \mathcal{C_1} * \mathcal{C_2} ...* \mathcal{C_m} C=C1∗C2...∗Cm,乘积量化的名称也来源于此。
以m=4为例,要达到上一节的20W量级, ∣ ∣ C i ∣ ∣ || \mathcal{C_i} || ∣∣Ci∣∣只需要达到22即可,要恢复到2000W级别也只需要达到67即可。
以 C \mathcal{C} C 达到2000W量级的情况为例,每个分组的codebook中心点数量 k ∗ k^{*} k∗为67,现在来分析下对应的空间和时间复杂度
- 中心点之间的距离矩阵: 记 ∣ ∣ C i ∣ ∣ || \mathcal{C_i} || ∣∣Ci∣∣ 为 k ∗ k^* k∗ ,距离矩阵大小为 O ( m ∗ ( k ∗ ) 2 ) O(m*(k^*)^2) O(m∗(k∗)2) 。若用float表示距离,此例子中距离矩阵约为70M
- y → c ∈ C i y \to c \in \mathcal{C_i} y→c∈Ci的映射关系,若以int标识一个向量,则共约 m × N × 4 = 320 M m \times N \times 4=320M m×N×4=320M内存
- 聚类时间复杂度:k-means算法的时间复杂度依然为 O ( m i t e r N k D ) O(m_{iter} NkD) O(miterNkD),在此例中需要对m组分别进行k-means,总时间复杂度为 O ( m N k ∗ D ∗ m i t e r ) O(mNk^*D*m_{iter}) O(mNk∗D∗miter),此例中为 5 m ∗ 1 0 12 5m*10^{12} 5m∗1012,比上例降低了3个数量级
- 距离矩阵时间复杂度:维度D与距离矩阵元素数量的乘积,即 O ( D m ( k ∗ ) 2 ) O(Dm(k^*)^2) O(Dm(k∗)2),约 7 × 1 0 10 7 \times 10^{10} 7×1010
乘积量化大幅度降低空间占用的本质原因就在于:表达的向量空间是 ( k ∗ ) m (k^*)^m (k∗)m,但占用的磁盘空间为 m k ∗ mk^* mk∗
论文中给出的经验取值是 k ∗ = 256 k^*=256 k∗=256 , m = 8 m=8 m=8 ,对应的向量空间大小为 2 64 2^{64} 264约 1.8 × 1 0 19 1.8\times 10^{19} 1.8×1019
Quantization场景下的距离计算
在没有Quantization的场景下,距离计算是直接对两个点计算 ∣ ∣ x − y ∣ ∣ 2 || x-y || _2 ∣∣x−y∣∣2
但在Quantization的场景下,不需要直接计算x和y的距离,而是通过中心点进行计算。这种方式有两个变种:
SDC
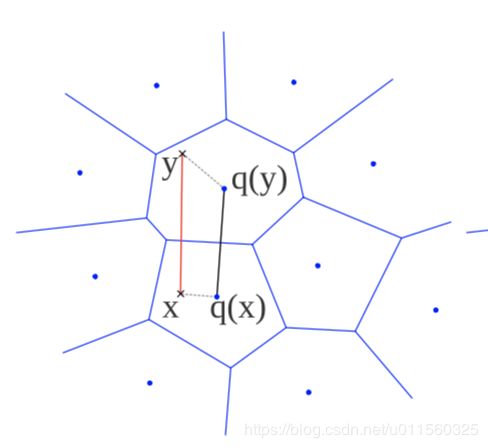
SDC(Symmetric Distance Computation): 两个向量之间的距离以两个向量所在的中心点距离来度量。误差小于等于x到中心点的距离+y到中心点的距离。
在PQ场景下,SDC距离表示为: S D C ( x , y ) = d ^ ( x , y ) = d ( q ( x ) , q ( y ) ) = Σ j d ( q j ( x ) , q j ( y ) ) 2 SDC (x,y)= \hat{d}(x,y)=d(q(x),q(y))=\sqrt{\Sigma_j{d(q_j(x),q_j(y))^2}} SDC(x,y)=d^(x,y)=d(q(x),q(y))=Σjd(qj(x),qj(y))2
由于中心向量之间的距离已经存好(见上一节),计算x与y之间的距离只要查表即可,表的规模约70M,计算距离矩阵耗时数量级 1 0 10 10^{10} 1010
如果不想占用距离矩阵的空间,则时间复杂度为 O ( D m k ∗ ) O(Dmk^*) O(Dmk∗),约为 1 0 5 10^5 105
ADC
ADC(Asymmetric Distance Computation):x与y之间的距离以x与y所在的中心点距离来度量。用到三角形性质:两边之差小于第三边,所以误差一定小于等于y与中心点之间的距离

在PQ场景下,ADC距离表示为: d ~ ( x , y ) = d ( x , q ( y ) ) \tilde{d}(x,y)=d(x,q(y)) d~(x,y)=d(x,q(y))
记向量x的第i组元素为 u i ( x ) u_i(x) ui(x),则 A D C ( x , y ) = Σ j d ( u j ( x ) , q j ( y ) ) 2 ADC(x,y)=\sqrt{\Sigma_j{d(u_j(x),q_j(y))^2}} ADC(x,y)=Σjd(uj(x),qj(y))2
此场景下如果想要通过查表得到距离,则数据准备环节的距离矩阵的大小约为 O ( m n k ∗ ) ∗ 4 = 20 G O(mnk^* )*4=20G O(mnk∗)∗4=20G (每个向量都要和m个分组中每个中心向量计算距离),耗时数量级 1 0 13 10^{13} 1013
若直接计算,则复杂度与不查表版本的SDC相同,也是 O ( D m k ∗ ) O(Dmk^*) O(Dmk∗),约为 1 0 5 10^5 105
若使用查表策略,则ADC在精度更高的情况下,付出了更多的内存代价
IVFADC
上一节中,直接计算的时间主要耗费在与所有的中心向量进行对比上了。一种很自然的方法就是先找到一个大概的候选中心节点,避免与大量根本不可能的是最近邻的点进行计算。
粗糙量化(coarse quantization)+残差量化
因此,Matthijs在论文中提出了粗糙量化+残差量化的过程。具体来说,就是先从整个数据集合中构造一个大小为 k k ′ kk^{'} kk′ (假设取值为1000)的小规模codebook C c \mathcal{C_c} Cc,量化器记为 q c q_c qc,于是每个向量都会有一个残差 r ( y ) = y − q c ( y ) r(y)=y-q_c(y) r(y)=y−qc(y)。原始的向量可能会有特别大的分布差异/不平衡,但通过残差化之后的结果可以大幅度缓解这种问题。
再对 r ( y ) r(y) r(y)使用PQ步骤,由于 r ( y ) r(y) r(y) 相对于原始向量的"能量"更低,所以通过PQ步骤可以更精确地进行模拟。记PQ步骤的量化器为 q p q_p qp,则 y 通过 q c ( y ) + q p ( y − q c ( y ) ) q_c(y)+q_p(y-q_c(y)) qc(y)+qp(y−qc(y)) 来表示。这样的话两个向量x、y之间的距离 d ( x , y ) d(x,y) d(x,y) 可以近似表示为
d ¨ ( x , y ) = d ( x , q c ( y ) + q p ( y − q c ( y ) ) ) = d ( x − q c ( y ) , q p ( y − q c ( y ) ) ) = Σ j d ( u j ( x − q c ( y ) ) , q p j ( u j ( y − q c ( y ) ) ) ) 2 \ddot{d}(x,y) =d (x,q_c(y) + q_p(y-q_c(y))) = d(x - q_c(y) , q_p(y-q_c(y))) = \sqrt{\Sigma_jd({u_j(x-q_c(y)),q_{p_j}(u_j(y-q_c(y))))^2}} d¨(x,y)=d(x,qc(y)+qp(y−qc(y)))=d(x−qc(y),qp(y−qc(y)))=Σjd(uj(x−qc(y)),qpj(uj(y−qc(y))))2
记残差量化的codebook大小为 k p k_p kp (以64为例),如果要将这里的 u j ( x − q c ( y ) ) u_j(x-q_c(y)) uj(x−qc(y)) 提前计算好,即对每个x提前计算好与所有中心向量 c ∈ C c c \in \mathcal{C_c} c∈Cc 的距离,时间复杂度为 O ( D N k k ′ ) O(DNkk^{'} ) O(DNkk′),本文例子为 1 0 13 10^{13} 1013 ,空间复杂度为 O ( N k k ′ ) O(Nkk^{'}) O(Nkk′) ,本文的例子为20G*4B=80GB。
索引结构
通过倒排索引,能大幅提高搜索效率

论文中提出使用 k k ′ kk^{'} kk′ 个倒排索引存储粗糙中心点 c i c_i ci对应的向量列表 L i \mathcal{L}_i Li 。每个向量通过如下的格式表示,其中id是向量的索引id,code是对应的PQ中心点索引列表。PQ中每个组的中心点数量为 k ∗ k^* k∗,则需要 ⌈ l o g 2 k ∗ ⌉ \lceil log_2{k^*} \rceil ⌈log2k∗⌉ 个bit来表示哪一个中心点,共 m ∗ ⌈ l o g 2 k ∗ ⌉ m*\lceil log_2{k^*} \rceil m∗⌈log2k∗⌉个bit

当进行搜索时,可以通过 q c q_c qc 函数获取对应簇下所有的向量
索引过程

- 通过量化器 q c q_c qc 将向量 y y y 映射到 q c ( y ) q_c(y) qc(y)
- 计算残差 r ( y ) = y − q c ( y ) r(y) = y-q_c(y) r(y)=y−qc(y)
- 将残差 r ( y ) r(y) r(y) 量化到 q p ( r ( y ) ) q_p(r(y)) qp(r(y)) ,其中包含了m个分组
- 构造一个 i d ∣ c o d e id|code id∣code 的 entry 并加入到 q c ( y ) q_c(y) qc(y) 对应的倒排列表 L \mathcal{L} L
搜索过程

由于很多情况下,最近邻不一定当前的簇里,所以不仅要查找当前簇,还要查找邻近的簇。
- 计算 C c \mathcal{C_c} Cc 中与入参x最近的 w w w 个中心点, O ( ( k k − w ) ∗ l o g w ) O((kk-w)*log{w}) O((kk−w)∗logw)
- 如果还有中心点没处理,取出一个中心点 c i c_i ci ,并计算对应的 r ( x ) = q p ( x − c i ) r(x) = q_p(x-c_i) r(x)=qp(x−ci)。否则跳到步骤6
- 计算 r ( x ) r(x) r(x) 与各个分组内的中心点距离, O ( m ∗ D m ∗ k ∗ ) = O ( D k ∗ ) O(m*\frac{D}{m}*k^{*}) = O(Dk^*) O(m∗mD∗k∗)=O(Dk∗)
- 由于同一个倒排索引中对应的 q c ( x ) q_c(x) qc(x) 与 q c ( y ) q_c(y) qc(y) 是相同的,所以 x 与 y 的距离只要看残差距离 d ( r ( x ) , r ( y ) ) d(r(x),r(y)) d(r(x),r(y)) 。由于 r ( x ) r(x) r(x) 与各个中心点的距离都已经计算好,所以每个向量只需要查表m次即可。O(m)
- 返回步骤2
- 使用最小堆得到K个距离最小的向量,由于每个倒排索引预期元素数量为 N k k ′ \frac{N}{kk^{'}} kk′N,所以耗时 O ( ( N k k ′ − K ) ∗ l o g K ) O((\frac{N}{kk^{'}}-K)*logK) O((kk′N−K)∗logK)
整个搜索过程的耗时为: O ( ( k k ′ − w ) ∗ l o g w ) + w ∗ ( O ( D k ∗ ) + O ( m ) ) + O ( ( N k k ′ − K ) ∗ l o g K ) O((kk^{'}-w)*log{w}) + w*(O(Dk^*)+O(m))+O((\frac{N}{kk^{'}}-K)*logK) O((kk′−w)∗logw)+w∗(O(Dk∗)+O(m))+O((kk′N−K)∗logK)
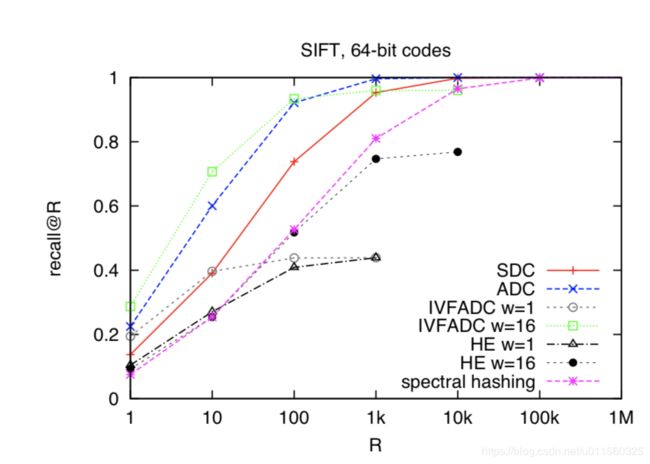
实验效果

优化
- 残差量化中,不同的向量到各自中心的残差都放在一起进行量化了,其实隐含了不同聚类中的分布相同的假设。这个假设带来了一定误差,但不这么做的话内存占用就要扩大 k k ′ kk^{'} kk′ 倍了
- 对向量的不同分组方式会导致表现有很大的差异。论文中的实验显示,比起随机分组,相关的字段应该放在同一个分组在某些场景下可以使正确率提高2-3倍。在索引之前,可以通过一些相似度分析的方法将向量通过合适的顺序进行组织。
- w w w 如果选取为1,会导致只查找当前簇内的向量,带来的结果可能比SDC还要差很多。作者在论文中的建议是取 w = 8 w=8 w=8,但不同的场景下还是应该先进行测试以取得内存空间与耗时的平衡。
总结
Faiss 本质上是将向量编码为有限个向量的组合,将向量之间的距离计算转换为可提前计算的有限个向量之间的距离。
简化计算的关键:
- 候选向量缩小到邻域向量
- 乘积量化带来的表达能力跃升: k a ≪ ( a ) k ka \ll (a)^k ka≪(a)k
- 预先计算乘积量化结果的距离矩阵,使距离计算变为查表操作。(乘积量化使距离矩阵的空间需求在可忍受的范围内)
举个例子:
如下向量12、13

首先对他们进行粗糙聚类计算

发现他们的聚类id都是1

接着分成三组计算残差

对残差进行乘积量化

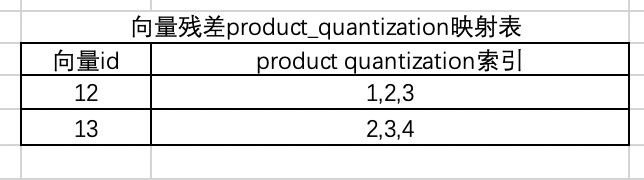
那么向量12、13的距离就可以直接通过累加三组乘积量化vector距离得到,其中vector距离都是提前计算好的

d ( 12 , 13 ) = ( a 12 ) 2 + ( b 23 ) 2 + ( c 34 ) 2 d(12,13)=\sqrt{(a_{12})^2+(b_{23})^2+(c_{34})^2} d(12,13)=(a12)2+(b23)2+(c34)2
参考文献:
《Product Quantization for Nearest Neighbor Search》: https://lear.inrialpes.fr/pubs/2011/JDS11/jegou_searching_with_quantization.pdf