目录
- RAII手法封装的互斥器mutex和条件变量condition类
- 前言
- 概要
- 原则
- 宏定义部分
- 互斥锁(Mutex)
- 条件变量(Condition variable)
- 倒计时(CountDownLatch)
- 死锁调试
- 小结
RAII手法封装的互斥器mutex和条件变量condition类
前言
近来在学习陈硕老师的muduo库,阅读了里面RAII手法封装的线程安全互斥锁的源码,期间遇到很多问题,包括有些宏对新手非常不友好等,解决这些问题花了很多时间,结合源码和自己的思考以及查阅的资料,本文记录下相关的难点,如有错误,欢迎指正交流。
概要
首先谈谈什么是RAII,用自己的话说RAII的做法是使用一个对象,在其构造时获取资源,在对象生命期控制对资源的访问使之始终保持有效,最后在对象析构的时候释放资源。RAII在C++中应用很广泛,用于管理资源、避免内存泄露。
原则
muduo库遵循以下几个原则:
- 用RAII手法封装mutex的创建、销毁、加锁、解锁这四个操作。
- 只用非递归的mutex(即不可重入的mutex)
- 不手工调用lock()和unlock()函数,一切交给栈上的Guard对象的构造和析构函数负责。
- 每次构造Guard对象的时候,思考一路上(调用栈上)已经持有的锁,防止因加锁顺序不同而导致死锁(deadlock)。由于Guard对象是栈上对象,看函数调用栈就能分析用锁的情况(后面会讲如何查看)。
- 不使用跨进程的mutex,进程间通信只用TCP sockets
- 必要时可以考虑用PTHREAD_MUTEX_ERRORCHECK来排错
宏定义部分
首先说明GUARDED_BY(mutex_)这种用于clang编译器线程安全检查的部分不在本文讨论范围,如果需要详细了解,见此链接Thread Safety Analysis。
Let's go
#ifdef CHECK_PTHREAD_RETURN_VALUE
#ifdef NDEBUG
__BEGIN_DECLS
extern void __assert_perror_fail (int errnum,
const char *file,
unsigned int line,
const char *function)
noexcept __attribute__ ((__noreturn__));
__END_DECLS
#endif
__attribute__ ((__noreturn__))告诉编译器__assert_perror_fail函数没有返回值也没有问题,__noreturn__的具体解释可以看_ attribute__((noreturn))的用法
#define MCHECK(ret) ({ __typeof__ (ret) errnum = (ret); \
if (__builtin_expect(errnum != 0, 0)) \
__assert_perror_fail (errnum, __FILE__, __LINE__, __func__);})
#else // CHECK_PTHREAD_RETURN_VALUE
#define MCHECK(ret) ({ __typeof__ (ret) errnum = (ret); \
assert(errnum == 0); (void) errnum;})
#endif // CHECK_PTHREAD_RETURN_VALUE这里的__typeof__相当于typeof(),__typeof__(ret) errnum就是把errnum定义为ret这个变量的类型,而__builtin_expect是一种优化手段,__builtin_expect(A,b)意思就是A表达式大概率等于b,经常被用来做以下宏定义:
#define likely(x) __builtin_expect(!!(x), 1) //x很可能为真
#define unlikely(x) __builtin_expect(!!(x), 0) //x很可能为假因为处理器都是流水线的,有些里面有多个逻辑运算单元,系统可以提前取多条指令进行并行处理,但遇到跳转时,则需要重新取指令,__builtin_expect的目的是增加条件分支预测的准确性,cpu 会提前装载后面的指令,遇到条件转移指令时会提前预测并装载某个分支的指令。
__assert_perror_fail (errnum, __FILE__, __LINE__, __func__)
最后会按照FILE :LINE : func : errnum打印出错误,和assert一样,都在编译时候执行,但是好处在于它能按照格式打印出错误在哪里,便于快速排查出错误。
想深入理解流水线优化的看这篇博客__builtin_expect
(ps:真是个神奇的东西。。。)
代码段最后一行也有一个宏,
#define MutexLockGuard(x) static_assert(false, "missing mutex guard var name");这个宏的作用使防止程序出现如下错误:
void doit()
{
MutexLockGuard(mutex); //遗漏变量名,产生一个临时对象又马上销毁了
//结果没有锁住临界区
//正确写法: MutexLockGuard lock(mutex);
}互斥锁(Mutex)
代码正文部分相对来说没什么难度,在代码里有相关注释。
这里解释下为什么要在MutexLock中还要引入UnassignGuard类,因为MutexLock类在封装mutex_的同时,还额外引入了一个状态成员MutexLock::holder_,这个成员用于记录锁的持有者的线程tid。
当其它线程调用pthread_cond_signal或pthread_cond_signal,它会重写获取锁。
这个时候,pthread_cond_wait势必会改变pthread_mutex_t和MutexLock:holder的一致性。所以需要在调用pthread_cond_wait的前后添加一些代码去相应的修改MutexLock::holder,也就是分别调用MutexLock::unassignHolder和MutexLock::assignHolder。MutexLock::UnassignGuard类的作用,就是利用RAII简化对MutexLock::unassignHolder和MutexLock::assignHolder的调用。
class MutexLock : noncopyable //noncopyable类利用了c++11中新特性
//将拷贝构造函数和复制构造函数delete
//确保MutexLock类就不可重入了
{
public:
MutexLock()
: holder_(0)
{
MCHECK(pthread_mutex_init(&mutex_, NULL));
//初始化互斥锁,并检查(MCHECK)是否初始化成功。
}
~MutexLock()
{
assert(holder_ == 0); //持有者不为0则出错,不能销毁锁。
MCHECK(pthread_mutex_destroy(&mutex_));
}
// must be called when locked, i.e. for assertion
bool isLockedByThisThread() const
{
return holder_ == CurrentThread::tid(); //该锁是否被当前线程持有
}
void assertLocked() const
{
assert(isLockedByThisThread());
}
// internal usage
void lock() ACQUIRE()
{
MCHECK(pthread_mutex_lock(&mutex_)); //上锁,并检查
assignHolder(); //并注册当前线程的tid
}
void unlock() RELEASE()
{
unassignHolder(); //清除已经注册的此线程的tid
MCHECK(pthread_mutex_unlock(&mutex_)); //释放锁
}
pthread_mutex_t* getPthreadMutex() /* non-const */
{
return &mutex_;
}
private:
friend class Condition;
//由于存在holder_,用于解除注册,这里结合下面的condition类会更加好理解
class UnassignGuard : noncopyable
{
public:
explicit UnassignGuard(MutexLock& owner)
: owner_(owner)
{
owner_.unassignHolder();
}
~UnassignGuard()
{
owner_.assignHolder();
}
private:
MutexLock& owner_;
};
void unassignHolder()
{
holder_ = 0;
}
void assignHolder()
{
holder_ = CurrentThread::tid();
}
pthread_mutex_t mutex_;
pid_t holder_;
};
class MutexLockGuard : noncopyable
{
public:
explicit MutexLockGuard(MutexLock& mutex)
: mutex_(mutex)
{
mutex_.lock();
}
~MutexLockGuard()
{
mutex_.unlock();
}
private:
MutexLock& mutex_;
};
} // namespace muduo
#define MutexLockGuard(x) error "Missing guard object name"条件变量(Condition variable)
1、注意区分signal和broadcast:
broadcast通常用于表明状态变化,signal通常用于表示资源可用
2、pthread_cond_wait:阻塞等待条件变量成立->解锁->加锁(见下图)
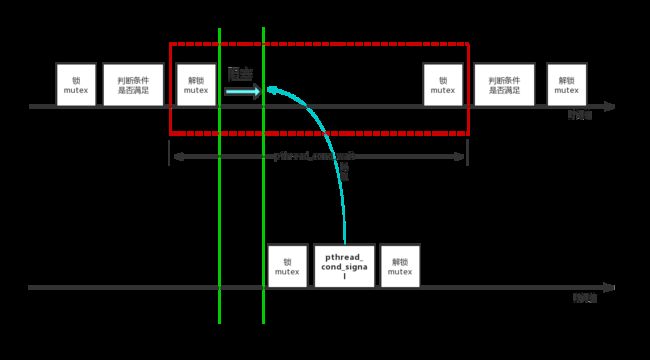
- 传入前锁mutex目的:为了保证线程从条件判断到进入pthread_cond_wait前,条件不被改变。
- 传入后解锁的目的:为了条件能够被改变
- 返回前再次锁mutex:返回前再次锁mutex是为了保证线程从pthread_cond_wait返回后 到 再次条件判断前不被改变。
知道原理后Condition类的源码实现也不难。
class Condition : noncopyable
{
public:
explicit Condition(MutexLock& mutex)
: mutex_(mutex)
{
MCHECK(pthread_cond_init(&pcond_, NULL));
}
~Condition()
{
MCHECK(pthread_cond_destroy(&pcond_));
}
void wait()
{
MutexLock::UnassignGuard ug(mutex_); //先将holder_清零,防止出现死锁
MCHECK(pthread_cond_wait(&pcond_, mutex_.getPthreadMutex()));
//ug析构的时候,会将holder_置为该线程的tid
}
// returns true if time out, false otherwise.
bool waitForSeconds(double seconds);
void notify()
{
MCHECK(pthread_cond_signal(&pcond_));
}
void notifyAll()
{
MCHECK(pthread_cond_broadcast(&pcond_));
}
private:
MutexLock& mutex_;
pthread_cond_t pcond_;
};
} // namespace muduo倒计时(CountDownLatch)
一种常用且易用的同步手段,它有两个用途:
- 主线程发起多个子线程,等这些子线程各自都完成一定的任务之后,主线程才继续执行。通常用于主线程等待多个子线程完成初始化。
- 主线程发起多个子线程,子线程都等待主线程,主线程完成其他一些任务之后通知所有子线程开始执行。通常用于多个子线程等待主线程发起“起跑”命令。
当然我们可以直接用条件变量来实现以上两种同步,但如果用CountDownLatch的话,逻辑更加清晰。
class CountDownLatch : boost::noncopyable
{
public:
explicit CountDownLatch(int count); //倒数几次
void wait(); //等待计数值变为0
void countDown(); //计数减一
private:
mutable MutexLock mutex_;
Condition condition_;
int count_;
};
inline
CountDownLatch::CountDownLatch(int count)
: mutex_(),
condition_(mutex_),
count_(count)
{}
void CountDownLatch::wait()
{
MutexLockGuard lock(mutex_);
while(count_ > 0)
condition_.wait();
}
void CountDownLatch::countDown()
{
MutexLockGuard lock(mutex_);
--count_;
if(count_ == 0)
condition_.notifyAll();
}注意到countDown()使用的是notifyAll(),而前面enqueue()使用的是notify(),原因见condition部分的第一点
死锁调试
死锁比较容易debug,把各个线程的调用栈打出来(gdb中使用thread apply all bt命令),只要每个函数不是特别长,很容易看出来是怎么死的。或者可以用PHTREAD_MUTEX_ERRORCHECK一下子就能找到错误。
具体调试操作可以看陈硕《Linux多线程服务端编程:使用muduo C++网络库》的2.1.2节。
小结
对于线程同步,掌握mutex和condition是最基本的,按陈硕老师的原话MutexLock和MutexLockGuard这两个class应该能在纸上默写出来。
同时看了这么多,还是留下一个小问题,CurrentThread::tid()函数,将在之后再解决。
以上