【图像处理】轮廓二阶矩计算目标中心-计算目标中心位置方法3
参考 http://blog.csdn.net/yang6464158/article/details/42459595
特征矩的知识在概率论和数理统计中有介绍,空间矩的方法在图像应用中比较广泛,包括零阶矩求面积、一阶矩确定重心、二阶矩确定主方向、二阶矩和三阶矩可以推导出七个不变矩Hu不变矩,不变矩具有旋转,平移、缩放等不变性,因此在工业应用和模式识别中得到广泛的应用。
目标物体灰度函数特征矩的公式定义如下:

如果是二值图像,那么f(x,y)就变成
在OpenCV中,可以很方便的计算多边形区域的3阶特征矩,opencv中的矩主要包括以下几种:空间矩,中心矩和中心归一化矩。
class Moments { public: ...... // 空间矩 double m00, m10, m01, m20, m11, m02, m30, m21, m12, m03;// 中心矩double mu20, mu11, mu02, mu30, mu21, mu12, mu03;// 中心归一化矩 double nu20, nu11, nu02, nu30, nu21, nu12, nu03; }空间矩的公式为:

可以知道,对于01二值化的图像,m00即为轮廓的面积。中心矩的公式为:

其中:

归一化的中心矩公式为:


二阶中心距,也叫作方差,它告诉我们一个随机变量在它均值附近波动的大小,方差越大,波动性越大。方差也相当于机械运动中以重心为转轴的转动惯量。(The moment of inertia.)
三阶中心距告诉我们一个随机密度函数向左或向右偏斜的程度。
在均值不为零的情况下,原点距只有纯数学意义。
A2,二阶矩就是 E(X^2)即样本平方均值 ,具体说来就是 A2=(西格玛Xi^2)/n-----(2)
Ak,K阶矩就是 E(X^k)即样本K次方的均值,具体说来就是 Ak=(西格玛Xi^k)/n,-----(3)
不变矩的物理含义:
如果把图像看成是一块质量密度不均匀的薄板,其图像的灰度分布函数f(x,y)就是薄板的密度分布函数,则其各阶矩有着不同的含义,如零阶矩表示它的总质量;一阶矩表示它的质心;二阶矩又叫惯性矩,表示图像的大小和方向。事实上,如果仅考虑阶次为2的矩集,则原始图像等同于一个具有确定的大小、方向和离心率,以图像质心为中心且具有恒定辐射率的椭圆。由三阶矩以下矩构成的七个矩不变量具有平移、旋转和尺度不变性等等。当密度分布函数发生改变时,图像的实质没有改变,仍然可以看做一个薄板,只是密度分布有所改变。虽然此时各阶矩的值可能发生变化,但由各阶矩计算出的不变矩仍具有平移、旋转和尺度不变性。通过这个思想,可对图像进行简化处理,保留最能反映目标特性的信息,再用简化后的图像计算不变矩特征,可减少计算量。
研究表明,只有基于二阶矩的不变矩对二维物体的描述才是真正的与旋转、平移和尺度无关的。较高阶的矩对于成像过程中的误差,微小的变形等因素非常敏感,所以相应的不变矩基本上不能用于有效的物体识别。即使是基于二阶矩的不变矩也只能用来识别外形相差特别大的物理,否则他们的不变矩会因为很相似而不能识别。
在OpenCV中,还可以很方便的得到Hu不变距,Hu不变矩在图像旋转、缩放、平移等操作后,仍能保持矩的不变性,所以有时候用Hu不变距更能识别图像的特征。
1、在数学领域,矩 非常的常见
2、在计算机视觉中,使用2维离散形式的矩计算方法
3、使用矩,可以计算物体的面积,物体的质心等。
4、中心矩的计算方法是:某个矩除以0阶矩
5、高阶矩具有旋转不变性,尺度不变性,变换不变性等。
我们很熟悉概率论中的一阶矩二阶矩高阶矩,但是很多人可能和我一样,不明白图像中矩是拿来干嘛的。

其中M00即零阶矩

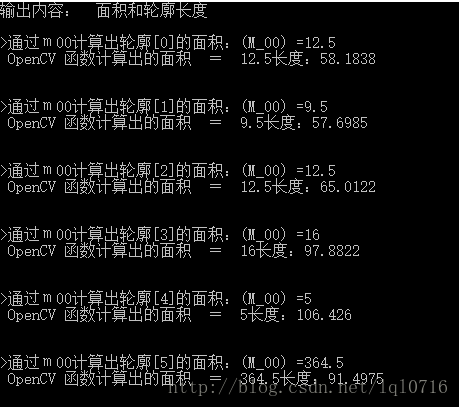
OpenCV代码如下所示:
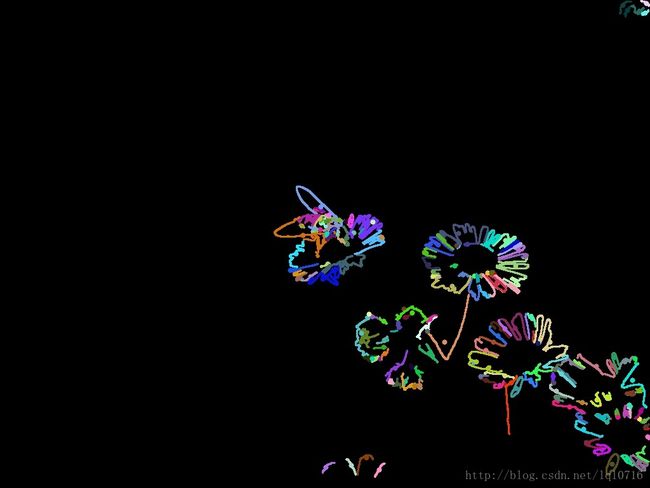
结果如下:
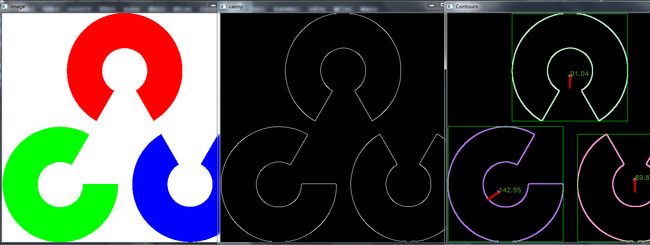
计算得到的第二个目标物面积和周长明显不正确,具体原因有待查找
矩、中心矩、质心、patch方向
author@jason_ql
http://blog.csdn.net/lql0716
1、几何矩理论
1.1 矩与数学期望
- 数学期望
定义(一维离散):设 X∈[a,b] ,密度为 f(x) ,数学期望为:
E(X)=∑i=1∞xiP(xi)
定义(一维连续):设 X 为连续型随机变量,其概率密度为 f(x) ,则X的数学期望为:
E(X)=∫+∞−∞xf(x)dx
注:假定广义积分绝对收敛,即 ∫+∞−∞|x|f(x)dx 存在
定义(二维离散):对于离散变量 (X,Y) 的 P(xi,yi) , PX(xi)=∑jP(xi,yj) 期望为:
E(X)=∑ixiPX(xi)=∑j∑ixiP(xi,yj)
E(Y)=∑jyjPY(yj)=∑j∑iyjP(xi,yj)
定义(二维连续):连续变量 (X,Y) 的 f(x,y) :
fX(x)=∫+∞−∞f(x,y)dy
E(X)=∫+∞−∞xfX(x)dx=∫+∞−∞x(∫+∞−∞f(x,y)dy)dx=∫+∞−∞∫+∞−∞xf(x,y)dxdy
E(Y)=∫+∞−∞yfY(y)dy=∫+∞−∞∫+∞−∞yf(x,y)dxdy
- 原点矩
定义1:设 X 是随机变量,则称 νk(X)=E(Xk) 为 X 的 k 阶原点矩。
若 X 是离散型随机变量,则:
νk(X)=∑ixkip(xi)
若 X 是连续型随机变量,则:
νk(X)=∫+∞−∞xkf(x)dx
- 中心距
定义2:设 X 是随机变量,则称
μk(X)=E(X−E(X))k为 X 的 k 阶 中心距。
若 X 是离散型随机变量,则:
μk(X)=∑i(xi−E(X))kp(xi)
若 X 是连续型随机变量,则:
μk(X)=∫+∞−∞(x−E(X))kf(x)dx
- 原点矩与中心距
当中心距中的 E(X) 为0时,此时为 k 阶原点矩,即原点矩是中心距的特殊情况。
一阶原点矩就是数学期望,二阶中心距就是方差,在实际中常用低阶矩,高于四阶矩极少使用。
原点矩与中心距的关系式:
以上可对 μr 用组合数拆开得到。
1.2 图像的矩
把图像的像素看做密度函数 f(x,y) ,对该像素点求期望 E ,即是图像的矩(原点矩)。具体的求解过程参看下面第2节。
一般来说,一阶矩和零阶矩可以计算某个形状的重心,二阶矩可以计算形状的方向。
图像的矩主要表征了图像区域的几何特征,又称几何矩,由于具有旋转、平移、尺度等不变的特兴奋,所以又称为不变矩。
利用不变矩可以计算出物体的圆形度(物体形状和园的接近程度)、物体的矩形度(物体形状和矩形的接近程度)、物体的水平和垂直对称性、物体的主轴方向、扁度等。
-
原点矩:
mpq=∑x−1M∑y−1Nxpyqf(x,y) -
中心距:
μpq=∑x−1M∑y−1N(x−x0)p(y−y0)qf(x,y) -
归一化中心距:
ηpq=μpqμr00
其中 r=p+q+22,p+q=2,3,... -
一阶矩:
见下面第2节. -
二阶矩:
M20 和 M02 分别表示图像围绕通过重心的垂直和水平轴线的惯性矩。
M30 和 M03 可以度量图像对于垂直和水平轴线的对称性等。
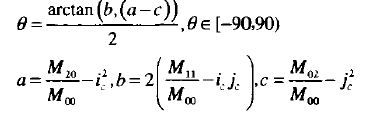
物体形状的方向:
其中:
根据一阶矩的质心 C=(M10M00,M01M00) 有
2、质心原理
在图像处理中,一阶矩与形状有关,二阶矩显示曲线围绕直线平均值到扩展程度,三阶矩是关于平均值到对称性到测量.由二阶矩和三阶矩可以导出一组共7个不变矩.而不变矩是图像到统计特性,满足平移,伸缩,旋转均不变到不变性.
-
moments of a patch(矩):
mpq=∑x=−r,y=−rrxpyqI(x,y)(1) -
角点为中心:
m00=∑x=−r,y=−rrx0y0I(x,y)=∑x=−r,y=−rrI(x,y)(1-1) -
一阶矩 m01 :
m01=∑x=−r,y=−rrx0y1I(x,y)=∑x=−r,y=−rry∗I(x,y)(1-2) -
一阶矩 m10 :
m10=∑x=−r,y=−rrx1y0I(x,y)=∑x=−r,y=−rrx∗I(x,y)(1-3) -
centroid(质心,亦可称为重心):
C=(m10m00,m01m00)(2)
计算质心的优势:对噪声不敏感。当有外部噪声干扰时,计算出的质心不会偏离太大。从数学的角度来看,这种方法是计算一个连通域的质心(或一个团块儿blob的质心)。 -
构造一个向量 OC−→− ,从角点中心 O 到质心 C 。
-
orientation of patch(方向):
θ=atan2(m01,m10)(3)
建立以角点为圆心的坐标系,如图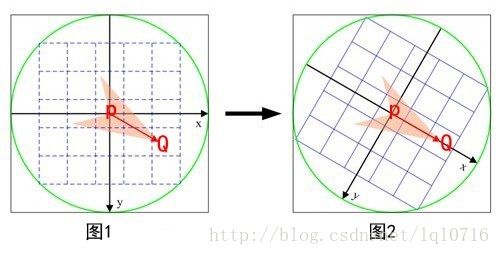
在图中, P 为角点,园内为取点区域,每个方格代表一个像素。
则质心 Q 可根据式(2)求得。
3、中心距函数moments()
- moments()
Calculates all of the moments up to the third order of a polygon or rasterized shape.
C++: Moments moments(InputArray array, bool binaryImage=false )
Python: cv2.moments(array[, binaryImage]) → retval
C: void cvMoments(const CvArr* arr, CvMoments* moments, int binary=0 )
Python: cv.Moments(arr, binary=0) → moments
Parameters:
array– Raster image (single-channel, 8-bit or floating-point 2D array) or an array ( 1 \times N or N \times 1 ) of 2D points (Point or Point2f ).
binaryImage– If it is true, all non-zero image pixels are treated as 1’s. The parameter is used for images only.
moments– Output moments.
- The function computes moments, up to the 3rd order, of a vector shape or a rasterized shape. The results are returned in the structure Moments defined as:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
4、中心矩示例代码
- opencv2.4.13
4.1 C++版代码
- 原图:

效果图:
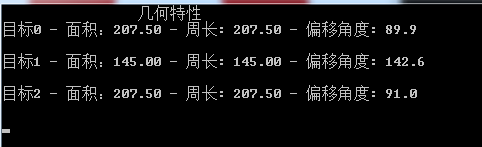
部分打印结果:
4.2 Python版代码
原图:
效果图:

5、Hu矩HuMoments()
原点矩:
中心距:
归一化中心距:
其中 r=p+q+22,p+q=2,3,...
当图像变化时, mpq 也变化,而 μpq 具有平移不变形,但对旋转依然敏感。如果用归一化中心距,则可以保持平移不变性、伸缩不变性。
Hu矩利用二阶、三阶中心距构造了7个不变矩,它们在连续图像条件下可保持平移、旋转、伸缩不变,公式如下:
M1=η20+η02
M2=(η20−η02)2+4η211
M3=(η30−3η12)2+(3η21−η03)2
M4=(η30+η12)2+(η21+η03)2
M5=(η30−3η12)(η30+η12)((η30+η12)2−3(η21+η03)2)+(3η21−η03)(η21+η03)(3(η30+η12)2−(η21+η03)2)
M6=(η20−η02)((η30+η12)2−(η21+η03)2)+4η11(η30+η12)(η21+η03)
M7=(3η21−η03)(η30+η12