遗传算法(四)MATLAB GA工具箱使用 附解TSP问题
- 笔记(一) 基本遗传算法
- 笔记(二) 遗传算法的优化改进
- 笔记(三) 遗传算法解组合优化
- 笔记(四) MATLAB遗传算法工具箱使用
基本使用
1. 直接参见函数ga
函数原型:[x fval] = ga(@fitnessfun, nvars, options)
x是使fitnessfun函数取最小值使的自变量值。nvars为自变量的数目即x向量中包含的元素个数,option可暂时不填。
[x, f] = ga(@cos, 1);即得到一段简单的遗传算法代码,其作用为求解某函数的最小值。
如何调参:
x = ga(fitnessfcn,nvars,A,b,Aeq,beq,LB,UB,nonlcon,IntCon,options)- A, b,Aep, beq, LB, UB为线性约束项,即满足如下约束:
Ax≤bAeq≤x≤beqLB≤x≤UB
- nonlcon为非线性约束nonlenear constraints。其中运用了矢量化约束(Vectorized Constraints)的方法。nonlcon是一个返回两个参数的函数句柄,可以是当前路径下的一个函数文件@functionfile。其具有如下原型:
[c ceq] = nonlcon(x)其约束为c≤0, ceq=0。举个例子(来自MATLAB help,直接截图):
具有三个变量的规划中,有非线性约束:
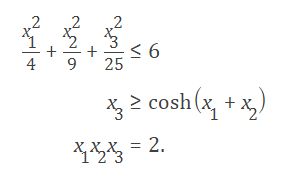
则其向量化约束函数nonlcon可以写为: 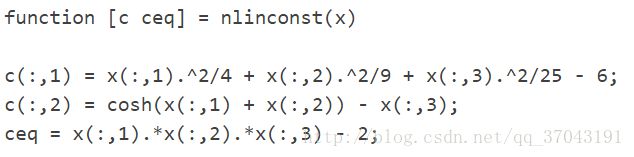
IntCon:自变量向量正整数的下标,从1到nvars.
options: 比较复杂,感兴趣的读者可以去查一下帮助文档。在这里举例用几个比较常用的option:
| 选项 | 功能 | 值 |
|---|---|---|
| CrossoverFraction | 交叉的概率 | 0-1的小数 |
| EliteCount | 用于精英原则, 每次遗传中一定会活下来的个体的个数 |
正整数 |
| FitnessLimit | 适应度的范围 | 标量/ {-Inf} |
| Generations | 迭代遗传的次数 | 正整数 |
| InitialPopulation | 初始种群 | 可以用上一次遗传生成的种群 作为下一次GA的初始种群 |
option中的功能要通过gaoptimset('param1',value1,'param2',value2,...)的形式调用。
再调用一个简单的GA代码作结:
[x, f] = ga(@cos, 1, [], [], [], [], 0, 2 * pi, [], gaoptimset('CrossoverFraction', 0.3))示例,解组合优化
1. 解TSP
由于MATLAB提供了很好的遗传算法接口,故对于用户来说只需要将问题抽象化,再进行编码、解码、计算适应度即可。
问题例子可以参考上一篇文章: 遗传算法(三)解TSP问题
这里直接给出适应度计算函数,包含编码和解码:
function Fitness = GA_TSPfun(chrom)
%% Create City
NumCity = 9;
Fitness = 0;
Dist =[0 2.8946 6.5107 5.5845 5.2429 5.8733 4.4377 2.7627 6.5644;
2.8946 0 4.3313 5.1381 5.7211 3.1830 2.3729 5.2763 5.0574;
6.5107 4.3313 0 3.6548 5.2943 1.8590 2.0889 9.2412 8.3103;
5.5845 5.1381 3.6548 0 1.7362 4.8792 3.3486 8.190210.1465;
5.2429 5.7211 5.2943 1.7362 0 6.2723 4.5224 7.531710.7633;
5.8733 3.1830 1.8590 4.8792 6.2723 0 1.8705 8.4338 6.4969;
4.4377 2.3729 2.0889 3.3486 4.5224 1.8705 0 7.1555 6.9906;
2.7627 5.2763 9.2412 8.1902 7.5317 8.4338 7.1555 0 7.1508;
6.5644 5.0574 8.310310.146510.7633 6.4969 6.9906 7.15080];
%% Decode:
order = [];
city = 1 : NumCity;
for j = 1 : NumCity
order = [order, city(1+rem( chrom(j)-1, length(city)))];
city(1 + rem(chrom(j)-1, length(city))) = [];
end
for i = 1 : NumCity
city1 = order(i);
city2 = order(1 + rem(i, NumCity));
Fitness = Fitness + Dist((city1-1)*NumCity + city2);
end
end经验证发现,同样的TSP问题,MATLAB的GAtools得出的解大多为31.7, 33左右,逼近最优解。但是前一篇中作者自己编写的遗传算法程序,得出的平均结果为40左右。可见自己写的代码爬山能力还不够强,挖个坑,以后再研究一下。